Custom kinematics
- mariusl
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

04 Jan 2025 11:46 #318048
by mariusl
Regards
Marius
www.bluearccnc.com
Custom kinematics was created by mariusl
I am using master on Bookworm in a RIP setup. I am trying to compile and install a custom kinematics module but it seems that things has changed a lot since I last tried this.
halcompile will not compile and install the .c file so I tried the only other method that I can find in the documentation.
I did this:
The output form the compile :-I see it linking all kinds of other modules but not my module. I cannot find output of my module anywhere.
It would seem that I cannot compile and install my own custom file.
What am I doing wrong or don't I understand the process?
halcompile will not compile and install the .c file so I tried the only other method that I can find in the documentation.
I did this:
** LDIR is LinuxCNC git root directory
** UDIR is user directory (not in LinuxCNC git tree)
** 1) $ cp LDIR/src/emc/kinematics/userkfuncs.c UDIR/my_userk.c
** 2) $ edit UDIR/my_userk.c as required
** 3) $ source LDIR/scripts/rip-environment
** 4) For genser-switchkins module use make command line option:
** $ cd LDIR/src
** $ userkfuncs=UDIR/my_userk.c make && sudo make setuidThe output form the compile :-
$ userkfuncs=/home/marius/mydev/my_userk.c make && sudo make setuid
Reading 203/203 dependency files
Done reading dependencies
!!!USERKFUNCS=/home/marius/mydev/my_userk.o
Reading 272/272 realtime dependency files
Done reading realtime dependencies
Compiling realtime /home/marius/mydev/my_userk.c
Linking ../rtlib/genhexkins.so
Linking ../rtlib/genserkins.so
Linking ../rtlib/xyzac-trt-kins.so
Linking ../rtlib/xyzbc-trt-kins.so
Linking ../rtlib/scarakins.so
Linking ../rtlib/pumakins.so
Linking ../rtlib/5axiskins.so
You now need to run 'sudo make setuid' in order to run in place with access to hardware.
chown root ../bin/rtapi_app
chmod 4750 ../bin/rtapi_app
chown root ../bin/linuxcnc_module_helper
chmod 4750 ../bin/linuxcnc_module_helper
It would seem that I cannot compile and install my own custom file.
What am I doing wrong or don't I understand the process?
Regards
Marius
www.bluearccnc.com
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4770
- Thank you received: 2138
04 Jan 2025 12:27 - 04 Jan 2025 14:44 #318055
by Aciera
Replied by Aciera on topic Custom kinematics
Any particular reason for not using the more recent 'userkins.comp' template?
github.com/LinuxCNC/linuxcnc/blob/master...onents/userkins.comp
For switchable kinematics see:
github.com/LinuxCNC/linuxcnc/blob/master...onents/millturn.comp
github.com/LinuxCNC/linuxcnc/blob/master...onents/userkins.comp
For switchable kinematics see:
github.com/LinuxCNC/linuxcnc/blob/master...onents/millturn.comp
Last edit: 04 Jan 2025 14:44 by Aciera.
Please Log in or Create an account to join the conversation.
- mariusl
-
Topic Author
- Offline
- Platinum Member
-
04 Jan 2025 15:00 #318080
by mariusl
Regards
Marius
www.bluearccnc.com
Replied by mariusl on topic Custom kinematics
I am following the directions of the documentation. If it was mentioned then I would follow your route.
linuxcnc.org/docs/stable/html/motion/switchkins.html
Is there documentation elsewhere that will be a bit more correct?
linuxcnc.org/docs/stable/html/motion/switchkins.html
Is there documentation elsewhere that will be a bit more correct?
Regards
Marius
www.bluearccnc.com
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4770
- Thank you received: 2138
04 Jan 2025 15:16 - 04 Jan 2025 15:23 #318084
by Aciera
Replied by Aciera on topic Custom kinematics
See bottom here (not much more info than what I already provided above):
linuxcnc.org/docs/stable/html/motion/kinematics.html
I'm not saying that the docs you linked are incorrect but I have never tried to create a custom kinematic that way. There might be reasons to go that route depending on what includes you need.
Maybe you could provide a bit more information on what you are trying to do?
linuxcnc.org/docs/stable/html/motion/kinematics.html
I'm not saying that the docs you linked are incorrect but I have never tried to create a custom kinematic that way. There might be reasons to go that route depending on what includes you need.
Maybe you could provide a bit more information on what you are trying to do?
Last edit: 04 Jan 2025 15:23 by Aciera.
Please Log in or Create an account to join the conversation.
- mariusl
-
Topic Author
- Offline
- Platinum Member
-
04 Jan 2025 15:42 - 04 Jan 2025 15:44 #318089
by mariusl
Regards
Marius
www.bluearccnc.com
Replied by mariusl on topic Custom kinematics
Trying to compile a custom kinematic module for RIP uspace rt using switchkins.
I am sure the documentation sucks as that method does not work.
I will try your method tomorrow.
I am sure the documentation sucks as that method does not work.
I will try your method tomorrow.
Regards
Marius
www.bluearccnc.com
Last edit: 04 Jan 2025 15:44 by mariusl.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4770
- Thank you received: 2138
04 Jan 2025 15:56 #318090
by Aciera
Replied by Aciera on topic Custom kinematics
I believe that the method you linked to is used to add a custom kinematic to the sim configs listed under section 2. So I just tried it:
Created a file 'mykins.c':
2. compiled on my RIP installation:
3. start 'xyzbc-trt.ini' and SWITCHKINS 'userk' now uses 'mykins.c'
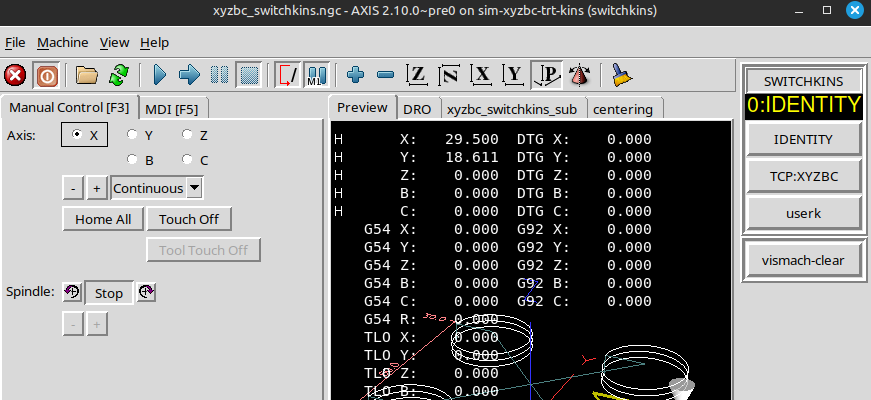
SO If you do not want to add another kinematic to one of those sim configs then this likely will not do much for you.
Created a file 'mykins.c':
/* userkfuncs.c: template file for a user set of
** switchable kinematics functions.
** License GPL Version 2
**
** Example Usage (for customizing the genser-switchkins module):
** (works with rtpreempt only rtai --> Makefile needs work)
**
** LDIR is LinuxCNC git root directory
** UDIR is user directory (not in LinuxCNC git tree)
** 1) $ cp LDIR/src/emc/kinematics/userkfuncs.c UDIR/my_userk.c
** 2) $ edit UDIR/my_userk.c as required
** 3) $ source LDIR/scripts/rip-environment
** 4) For genser-switchkins module use make command line option:
** $ cd LDIR/src
** $ userkfuncs=UDIR/my_userk.c make && sudo make setuid
*/
// typical includes:
//#include "rtapi_math.h" // if reqd
#include "kinematics.h"
#include "hal.h"
// Add for kins based on genserkins:
// #include "genserkins.h" //includes gomath,hal
//**********************************************************************
// static local variables and functions go here
static int userk_inited = 0;
static struct udata {
hal_s32_t *fct;
hal_s32_t *ict;
} *udata;
//**********************************************************************
int userkKinematicsSetup(const int comp_id,
const char* coordinates,
kparms* kp)
{
int res=0;
rtapi_print("\nuserkKinematicsSetup:\n"
" %s <%s> max_joints=%d allow_duplicates=%d\n\n",
__FILE__,coordinates,
kp->max_joints,kp->allow_duplicates);
udata = hal_malloc(sizeof(struct udata));
if (!udata) goto error;
// HAL_IO used to allow resetting demo pins:
res += hal_pin_s32_new("userk.fct", HAL_IO, &(udata->fct), comp_id);
res += hal_pin_s32_new("userk.ict", HAL_IO, &(udata->ict), comp_id);
if (res) goto error;
userk_inited = 1;
return 0; // 0 ==> OK
error:
return -1;
}
int userkKinematicsForward(const double *joint,
struct EmcPose * world,
const KINEMATICS_FORWARD_FLAGS * fflags,
KINEMATICS_INVERSE_FLAGS * iflags)
{
if (!userk_inited) {
rtapi_print_msg(RTAPI_MSG_ERR,
"myuserkins: not initialized\n");
return -1;
}
world->tran.x = joint[1];
world->tran.y = joint[0];
world->tran.z = joint[2];
world->a = joint[3];
world->c = joint[4];
return 0;
}
int userkKinematicsInverse(const EmcPose * pos,
double *joint,
const KINEMATICS_INVERSE_FLAGS * iflags,
KINEMATICS_FORWARD_FLAGS * fflags)
{
joint[1] = pos->tran.x;
joint[0] = pos->tran.y;
joint[2] = pos->tran.z;
joint[3] = pos->a;
joint[4] = pos->c;
return 0;
}2. compiled on my RIP installation:
user@user-iMac:~/git/linuxcnc-master/src$ userkfuncs=emc/kinematics/mykins.c make
Reading 203/203 dependency files
Done reading dependencies
!!!USERKFUNCS=emc/kinematics/mykins.o
Reading 272/272 realtime dependency files
Done reading realtime dependencies
Compiling realtime emc/kinematics/mykins.c
Linking ../rtlib/genhexkins.so
Linking ../rtlib/genserkins.so
Linking ../rtlib/xyzac-trt-kins.so
Linking ../rtlib/xyzbc-trt-kins.so
Linking ../rtlib/scarakins.so
Linking ../rtlib/pumakins.so
Linking ../rtlib/5axiskins.so
You now need to run 'sudo make setuid' in order to run in place with access to hardware.3. start 'xyzbc-trt.ini' and SWITCHKINS 'userk' now uses 'mykins.c'
SO If you do not want to add another kinematic to one of those sim configs then this likely will not do much for you.
Attachments:
The following user(s) said Thank You: mariusl
Please Log in or Create an account to join the conversation.
- mariusl
-
Topic Author
- Offline
- Platinum Member
-
04 Jan 2025 17:10 #318106
by mariusl
Regards
Marius
www.bluearccnc.com
Replied by mariusl on topic Custom kinematics
Well I would never have guessed that it was for the sims only.
Thanks for clearing it up for me.
Thanks for clearing it up for me.
Regards
Marius
www.bluearccnc.com
Please Log in or Create an account to join the conversation.
Time to create page: 0.110 seconds