Motor 0 Positionsfehler
- Wusel
- Offline
- Premium Member
-

Less
More
- Posts: 91
- Thank you received: 8
15 Mar 2025 07:11 #323994
by Wusel
Motor 0 Positionsfehler was created by Wusel
guten Morgen,
ich setze derzeit eine LuxTurn Drehbank auf. Anders als meine bishrigen LuxTurns erhält diese einen Glasmaßstab auf der X-Achse.
Dazu verwende ich LinuxCNC 9.3, eine Mesa7i96s und eine 7i85 für den Encoder Eingang.
Die ist mein erster Versuch, einen richtigen closedloop Regelkreis herzustellen und ich verzweifle an der erforderlichen Einstellung der Regelparameter.
Alle Videos und Dokus zeigen Werte von P mit ca. 10, FF1 01. und FF2 0.0001, und zum Start FF1 und FF" erst mal 0.
Dann fährt bei mir die Achse nur einen ganz kleinen Weg (Bruchteil von mm) und meldet Positiosfehler, auch bei ganz kleinen Geschwindigkeiten.
Mit dem Herumspielen von P, Accelleration, FF1 konnte ich die Achse dann soweit bewegen, dass ich im HALScope den X-error minimieren kann.
Der ist jetzt eigentlich schon recht gut (<0,02) aber nur, wenn FF1 ca.1 ist. Trotzdem meldet beim Beenden des Verfahrweges Linux wieder Motor Positionsfehler. Wo muss ich da noch angreifen? Solange P und FF1 falsch waren, sah man den X Error ansteigen und bei
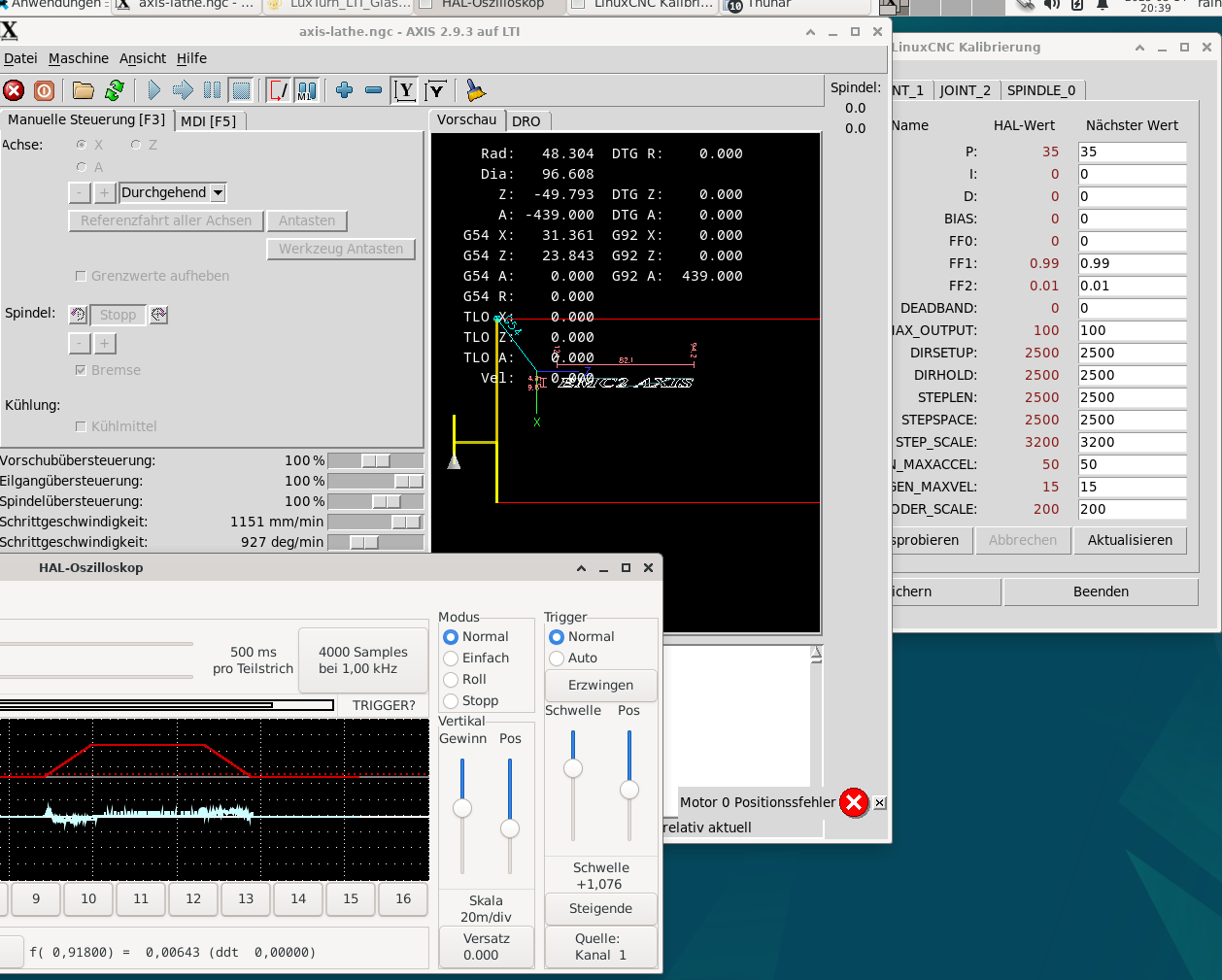 Erreichen von 1 kam die Fehlermeldung beim Verfahren. Aber hier ist der Fehler ja nur noch minimal und trotzdem kommt die Meldung. Liegt die Ursache ganz woanders?HAL, INI und Bildschirmaufnahme anbei
Erreichen von 1 kam die Fehlermeldung beim Verfahren. Aber hier ist der Fehler ja nur noch minimal und trotzdem kommt die Meldung. Liegt die Ursache ganz woanders?HAL, INI und Bildschirmaufnahme anbei
Wäre toll, wenn jemand eine Idee hätte
Rainer
ich setze derzeit eine LuxTurn Drehbank auf. Anders als meine bishrigen LuxTurns erhält diese einen Glasmaßstab auf der X-Achse.
Dazu verwende ich LinuxCNC 9.3, eine Mesa7i96s und eine 7i85 für den Encoder Eingang.
Die ist mein erster Versuch, einen richtigen closedloop Regelkreis herzustellen und ich verzweifle an der erforderlichen Einstellung der Regelparameter.
Alle Videos und Dokus zeigen Werte von P mit ca. 10, FF1 01. und FF2 0.0001, und zum Start FF1 und FF" erst mal 0.
Dann fährt bei mir die Achse nur einen ganz kleinen Weg (Bruchteil von mm) und meldet Positiosfehler, auch bei ganz kleinen Geschwindigkeiten.
Mit dem Herumspielen von P, Accelleration, FF1 konnte ich die Achse dann soweit bewegen, dass ich im HALScope den X-error minimieren kann.
Der ist jetzt eigentlich schon recht gut (<0,02) aber nur, wenn FF1 ca.1 ist. Trotzdem meldet beim Beenden des Verfahrweges Linux wieder Motor Positionsfehler. Wo muss ich da noch angreifen? Solange P und FF1 falsch waren, sah man den X Error ansteigen und bei
Wäre toll, wenn jemand eine Idee hätte
Rainer
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17919
- Thank you received: 5247
15 Mar 2025 12:31 #323999
by PCW
Replied by PCW on topic Motor 0 Positionsfehler
You might set the MIN_FERROR larger when tuning:
MIN_FERROR = 0.005
MIN_FERROR = 0.005
Please Log in or Create an account to join the conversation.
- Wusel
- Offline
- Premium Member
-
Less
More
- Posts: 91
- Thank you received: 8
15 Mar 2025 17:05 #324008
by Wusel
Replied by Wusel on topic Motor 0 Positionsfehler
I put it up to 0.1 and got no error messages any more. So I will slowly reduce it to see when the error comes up again.
Thanks a lot
Thanks a lot
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17919
- Thank you received: 5247
15 Mar 2025 17:45 #324010
by PCW
Replied by PCW on topic Motor 0 Positionsfehler
Normally you would set this so it never gives errors in normal operation
(since stopping on a following error is catastrophic )
(since stopping on a following error is catastrophic )
Please Log in or Create an account to join the conversation.
- Wusel
- Offline
- Premium Member
-
Less
More
- Posts: 91
- Thank you received: 8
16 Mar 2025 08:16 #324042
by Wusel
Replied by Wusel on topic Motor 0 Positionsfehler
I thought, this is the smallest error the maschine control will move the axis to and then be happy with the position. This is obviously not the case
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17919
- Thank you received: 5247
16 Mar 2025 15:00 #324055
by PCW
Replied by PCW on topic Motor 0 Positionsfehler
That would be the PID deadband pin.
Please Log in or Create an account to join the conversation.
- Wusel
- Offline
- Premium Member
-
Less
More
- Posts: 91
- Thank you received: 8
16 Mar 2025 17:47 #324064
by Wusel
Replied by Wusel on topic Motor 0 Positionsfehler
learning every day. Thanks again
Please Log in or Create an account to join the conversation.
Time to create page: 0.231 seconds