retrofit Bridgeport Prototrak Plus
- new2linux
- Offline
- Platinum Member
-

Less
More
- Posts: 711
- Thank you received: 9
17 Jun 2016 13:04 #76215
by new2linux
Replied by new2linux on topic retrofit Bridgeport Prototrak Plus
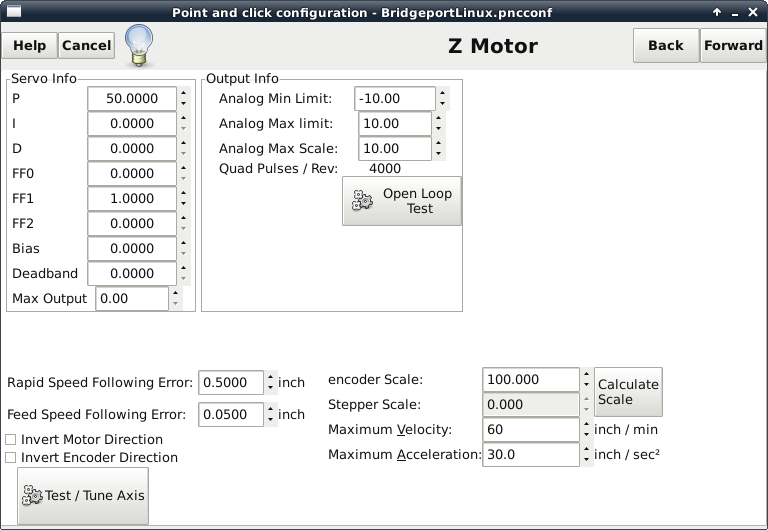
The screen to set the "z" as per Andy (Many thanks!) "keep the Z and set the f-error limits _really_ high" is this the area of the program I should be able to set in the "Servo Info" area?
This is the latest error files. I have looked at them, very close to the prior one. I checked to see if all were set 0 = x; 1 = y; 2 = z: One was not, now (and have checked to see if change was saved, it was).
Many thanks to all for your help!
This is the latest error files. I have looked at them, very close to the prior one. I checked to see if all were set 0 = x; 1 = y; 2 = z: One was not, now (and have checked to see if change was saved, it was).
Many thanks to all for your help!
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
17 Jun 2016 13:10 #76216
by andypugh
I am a but surprised if you are getting config errors if you are still using PnCConf. I thought you were hand editing the configs.
This seems to hint that you my not be using the config files you think you are using.
Replied by andypugh on topic retrofit Bridgeport Prototrak Plus
I think that would be a manual edit of the INI file [AXIS_2] section.set the f-error limits _really_ high" is this the area of the program I should be able to set in the "Servo Info" area?
I am a but surprised if you are getting config errors if you are still using PnCConf. I thought you were hand editing the configs.
This seems to hint that you my not be using the config files you think you are using.
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
17 Jun 2016 13:26 #76217
by new2linux
Replied by new2linux on topic retrofit Bridgeport Prototrak Plus
The pncconf file appears to be in the linuxcnc/configs director, when you use the "ls" command. I used the conf wizard to see where the file was being saved too, then went to command window. Does this help?
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
17 Jun 2016 14:00 #76220
by new2linux
This is the area Andy has talked about. Open this with Mousepad and edit to the preferred settings.
Replied by new2linux on topic retrofit Bridgeport Prototrak Plus
This is the area Andy has talked about. Open this with Mousepad and edit to the preferred settings.
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
21 Jun 2016 13:02 - 21 Jun 2016 13:09 #76341
by new2linux
I have edited the ini file (specifically the "z" f-error limits 0 to 50; 1 to 100; and 0 to 50), I don't see any change. There was a comment about if I were editing the ini file of not. If I were to run the Pncconf Wizard it will over right changes to the ini file, I did not use that wizard, but edited va. the mousepad.
Edit: On the 7i77 card there are 3 amber lights on.
many thanks
Replied by new2linux on topic retrofit Bridgeport Prototrak Plus
I have edited the ini file (specifically the "z" f-error limits 0 to 50; 1 to 100; and 0 to 50), I don't see any change. There was a comment about if I were editing the ini file of not. If I were to run the Pncconf Wizard it will over right changes to the ini file, I did not use that wizard, but edited va. the mousepad.
Edit: On the 7i77 card there are 3 amber lights on.
many thanks
Last edit: 21 Jun 2016 13:09 by new2linux.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4757
- Thank you received: 1459
21 Jun 2016 13:50 #76343
by Todd Zuercher
Replied by Todd Zuercher on topic retrofit Bridgeport Prototrak Plus
Now it says that your error is in your hal file "BridgeportLinux.hal" on line:181 that the pin 'hm2_5i25.0.encoder.00.position' was already linked to signal 'x-pos-fb'.
I'm not sure why you keep coming up with these repeated pin links to your encoder pins. If it something your doing manual editing the file, or something you did wrong configuring in Pncconf.
If you could attach the hal and ini files, maybe we could get a better idea of where you may have gone wrong.
I'm not sure why you keep coming up with these repeated pin links to your encoder pins. If it something your doing manual editing the file, or something you did wrong configuring in Pncconf.
If you could attach the hal and ini files, maybe we could get a better idea of where you may have gone wrong.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
21 Jun 2016 14:36 #76346
by new2linux
These are the files in question, hope they help.
Many thanks
Replied by new2linux on topic retrofit Bridgeport Prototrak Plus
These are the files in question, hope they help.
Many thanks
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4757
- Thank you received: 1459
21 Jun 2016 15:50 - 21 Jun 2016 15:52 #76349
by Todd Zuercher
Replied by Todd Zuercher on topic retrofit Bridgeport Prototrak Plus
Ok, it looks like you have the encoder info for the X axis duplicated for the Z
In the Z Axis section of your hal file change it to this
There were about 10 places where "hm2_5i25.0.encoder.00" needed changed to "hm2_5i25.0.encoder.02"
In the Z Axis section of your hal file change it to this
#*******************
# AXIS Z
#*******************
setp pid.z.Pgain [AXIS_2]P
setp pid.z.Igain [AXIS_2]I
setp pid.z.Dgain [AXIS_2]D
setp pid.z.bias [AXIS_2]BIAS
setp pid.z.FF0 [AXIS_2]FF0
setp pid.z.FF1 [AXIS_2]FF1
setp pid.z.FF2 [AXIS_2]FF2
setp pid.z.deadband [AXIS_2]DEADBAND
setp pid.z.maxoutput [AXIS_2]MAX_OUTPUT
setp pid.z.error-previous-target true
setp pid.z.maxerror .0005
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-vel-cmd => pid.z.command-deriv
net z-pos-fb => pid.z.feedback
net z-output => pid.z.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout2-scalemax [AXIS_2]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout2-minlim [AXIS_2]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout2-maxlim [AXIS_2]OUTPUT_MAX_LIMIT
net z-output => hm2_5i25.0.7i77.0.1.analogout2
net z-pos-cmd axis.2.motor-pos-cmd
net z-enable axis.2.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.02.counter-mode 0
setp hm2_5i25.0.encoder.02.filter 1
setp hm2_5i25.0.encoder.02.index-invert 0
setp hm2_5i25.0.encoder.02.index-mask 0
setp hm2_5i25.0.encoder.02.index-mask-invert 0
setp hm2_5i25.0.encoder.02.scale [AXIS_2]ENCODER_SCALE
net z-pos-fb <= hm2_5i25.0.encoder.02.position
net z-vel-fb <= hm2_5i25.0.encoder.02.velocity
net z-pos-fb => axis.2.motor-pos-fb
net z-index-enable axis.2.index-enable <=> hm2_5i25.0.encoder.02.index-enable
net z-pos-rawcounts <= hm2_5i25.0.encoder.02.rawcounts
# ---setup home / limit switch signals---
net z-home-sw => axis.2.home-sw-in
net z-neg-limit => axis.2.neg-lim-sw-in
net z-pos-limit => axis.2.pos-lim-sw-inThere were about 10 places where "hm2_5i25.0.encoder.00" needed changed to "hm2_5i25.0.encoder.02"
Last edit: 21 Jun 2016 15:52 by Todd Zuercher.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
21 Jun 2016 16:29 - 21 Jun 2016 16:37 #76352
by new2linux
Attached is an error file that has changed thanks to Todd for all your help! I scanned the attachment you sent and studied to find the differences and keyed in the update manually. I am in hope that this approach may lead to a method to solve the mystery of debugging.
Edit: I only believe the vfd reference (as in pid.s.maxoutput [SPINDLE_9] MAX_OUTPUT); the MAX_OUTPUT needs to say DEADBAND. This is just a guess.
Replied by new2linux on topic retrofit Bridgeport Prototrak Plus
Attached is an error file that has changed thanks to Todd for all your help! I scanned the attachment you sent and studied to find the differences and keyed in the update manually. I am in hope that this approach may lead to a method to solve the mystery of debugging.
Edit: I only believe the vfd reference (as in pid.s.maxoutput [SPINDLE_9] MAX_OUTPUT); the MAX_OUTPUT needs to say DEADBAND. This is just a guess.
Last edit: 21 Jun 2016 16:37 by new2linux. Reason: just my thinking
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4642
21 Jun 2016 16:38 #76354
by andypugh
Replied by andypugh on topic retrofit Bridgeport Prototrak Plus
Looks like no comms to the VFD:
I guess it is on Modbus? Is the VFD configured for Modbus and powered up?
failed to set register P0x0101 to 0x0064 (100): Connection timed out
mitsub_vfd.hal:12: waitpid failed gs2_vfd spindle-vfd
mitsub_vfd.hal:12: gs2_vfd exited without becoming readyI guess it is on Modbus? Is the VFD configured for Modbus and powered up?
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
Moderators: piasdom
Time to create page: 0.451 seconds