×
Forum Header
Update ini and hal file
- Dinuka_Shehan
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 333
- Thank you received: 26
15 Jul 2019 17:59 #139480
by Dinuka_Shehan
Update ini and hal file was created by Dinuka_Shehan
How to add new codes to ini and hal files to my currunt config?
Please Log in or Create an account to join the conversation.
- BigJohnT
-

- Offline
- Administrator
-

Less
More
- Posts: 3990
- Thank you received: 994
15 Jul 2019 18:02 #139482
by BigJohnT
Replied by BigJohnT on topic Update ini and hal file
Use a text editor, you might want to make a copy first.
JT
JT
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21692
- Thank you received: 7414
15 Jul 2019 18:10 #139485
by tommylight
Replied by tommylight on topic Update ini and hal file
Use only a text editor like mousepad or xed or gedit or geany, it is not advisable to use windows for editing machine files.How to add new codes to ini and hal files to my currunt config?
Please Log in or Create an account to join the conversation.
- Dinuka_Shehan
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 333
- Thank you received: 26
15 Jul 2019 18:16 #139489
by Dinuka_Shehan
Replied by Dinuka_Shehan on topic Update ini and hal file
These are the codes
### This code goes in your main .hal file
############# Spindle Encoder #############
# add scale and lowpass, these will be used in custom_postgui.hal
loadrt scale count=1
loadrt lowpass count=1
# add the encoder to HAL and attach it to threads.
loadrt encoder num_chan=1
addf encoder.update-counters base-thread
addf encoder.capture-position servo-thread
# set the HAL encoder to 60 pulses per revolution.
setp encoder.0.position-scale 60
# set the HAL encoder to non-quadrature simple counting using A only.
setp encoder.0.counter-mode true
#setp encoder.0.counter-mode 1 - alternative line
# connect the HAL encoder outputs to LinuxCNC.
net spindle-position encoder.0.position => motion.spindle-revs
net spindle-velocity encoder.0.velocity => motion.spindle-speed-in
net spindle-index-enable encoder.0.index-enable <=> motion.spindle-index-enable
# connect the HAL encoder inputs to the real encoder.
net spindle-phase-a encoder.0.phase-A <= parport.0.pin-13-in
net spindle-phase-b encoder.0.phase-B
net spindle-index encoder.0.phase-Z <= parport.0.pin-12-in
############# End Spindle Encoder #############
#### The following code goes in custom_postgui.hal
# **** Setup of spindle speed display using pyvcp -START ****
# **** Use ACTUAL spindle velocity from spindle encoder
# **** spindle-velocity bounces around so we filter it with lowpass
# **** spindle-velocity is signed so we use absolute component to remove sign
# **** ACTUAL velocity is in RPS not RPM so we scale it.
setp scale.0.gain 60
setp lowpass.0.gain 0.010000
net spindle-velocity => lowpass.0.in
net spindle-fb-filtered-rps lowpass.0.out => abs.0.in
net spindle-fb-filtered-abs-rps abs.0.out => scale.0.in
net spindle-fb-filtered-abs-rpm scale.0.out => pyvcp.spindle-speed
# **** set up spindle at speed indicator ****
net spindle-cmd => near.6.in1
net spindle-velocity => near.6.in2
net spindle-at-speed <= near.6.out
setp near.6.scale 1.500000
net spindle-at-speed => pyvcp.spindle-at-speed-led
### The following code goes in custompanel.xml
<?xml version='1.0' encoding='UTF-8'?>
<pyvcp>
<vbox>
<bd>6</bd>
<label>
<text>"Spindle Speed:"</text>
<font>("Helvetica",20)</font>
</label>
<bar>
<halpin>"spindle-speed"</halpin>
<max_>3000</max_>
</bar>
<label>
<text>"Spindle-At-Speed:"</text>
<font>("Helvetica",20)</font>
</label>
<hbox>
<label>
<text>" "</text>
<font>("Helvetica",20)</font>
</label>
<led>
<halpin>"spindle-at-speed-led"</halpin>
<size>30</size>
<on_color>"green"</on_color>
<off_color>"red"</off_color>
</led>
</hbox>
</vbox>
</pyvcp>
### This code goes in your main .hal file
############# Spindle Encoder #############
# add scale and lowpass, these will be used in custom_postgui.hal
loadrt scale count=1
loadrt lowpass count=1
# add the encoder to HAL and attach it to threads.
loadrt encoder num_chan=1
addf encoder.update-counters base-thread
addf encoder.capture-position servo-thread
# set the HAL encoder to 60 pulses per revolution.
setp encoder.0.position-scale 60
# set the HAL encoder to non-quadrature simple counting using A only.
setp encoder.0.counter-mode true
#setp encoder.0.counter-mode 1 - alternative line
# connect the HAL encoder outputs to LinuxCNC.
net spindle-position encoder.0.position => motion.spindle-revs
net spindle-velocity encoder.0.velocity => motion.spindle-speed-in
net spindle-index-enable encoder.0.index-enable <=> motion.spindle-index-enable
# connect the HAL encoder inputs to the real encoder.
net spindle-phase-a encoder.0.phase-A <= parport.0.pin-13-in
net spindle-phase-b encoder.0.phase-B
net spindle-index encoder.0.phase-Z <= parport.0.pin-12-in
############# End Spindle Encoder #############
#### The following code goes in custom_postgui.hal
# **** Setup of spindle speed display using pyvcp -START ****
# **** Use ACTUAL spindle velocity from spindle encoder
# **** spindle-velocity bounces around so we filter it with lowpass
# **** spindle-velocity is signed so we use absolute component to remove sign
# **** ACTUAL velocity is in RPS not RPM so we scale it.
setp scale.0.gain 60
setp lowpass.0.gain 0.010000
net spindle-velocity => lowpass.0.in
net spindle-fb-filtered-rps lowpass.0.out => abs.0.in
net spindle-fb-filtered-abs-rps abs.0.out => scale.0.in
net spindle-fb-filtered-abs-rpm scale.0.out => pyvcp.spindle-speed
# **** set up spindle at speed indicator ****
net spindle-cmd => near.6.in1
net spindle-velocity => near.6.in2
net spindle-at-speed <= near.6.out
setp near.6.scale 1.500000
net spindle-at-speed => pyvcp.spindle-at-speed-led
### The following code goes in custompanel.xml
<?xml version='1.0' encoding='UTF-8'?>
<pyvcp>
<vbox>
<bd>6</bd>
<label>
<text>"Spindle Speed:"</text>
<font>("Helvetica",20)</font>
</label>
<bar>
<halpin>"spindle-speed"</halpin>
<max_>3000</max_>
</bar>
<label>
<text>"Spindle-At-Speed:"</text>
<font>("Helvetica",20)</font>
</label>
<hbox>
<label>
<text>" "</text>
<font>("Helvetica",20)</font>
</label>
<led>
<halpin>"spindle-at-speed-led"</halpin>
<size>30</size>
<on_color>"green"</on_color>
<off_color>"red"</off_color>
</led>
</hbox>
</vbox>
</pyvcp>
Please Log in or Create an account to join the conversation.
- Grotius
-

- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
15 Jul 2019 18:30 #139491
by Grotius
Replied by Grotius on topic Update ini and hal file
Hi,
Geany is the easyest text editor for your example.
To intall geany type in terminal : apt-get install geany
If this giving nothing type in terminal : sudo apt-get install geany
Then at menu -> document -> set-filetype -> scripting languages -> python source file
Your text is displayed as :
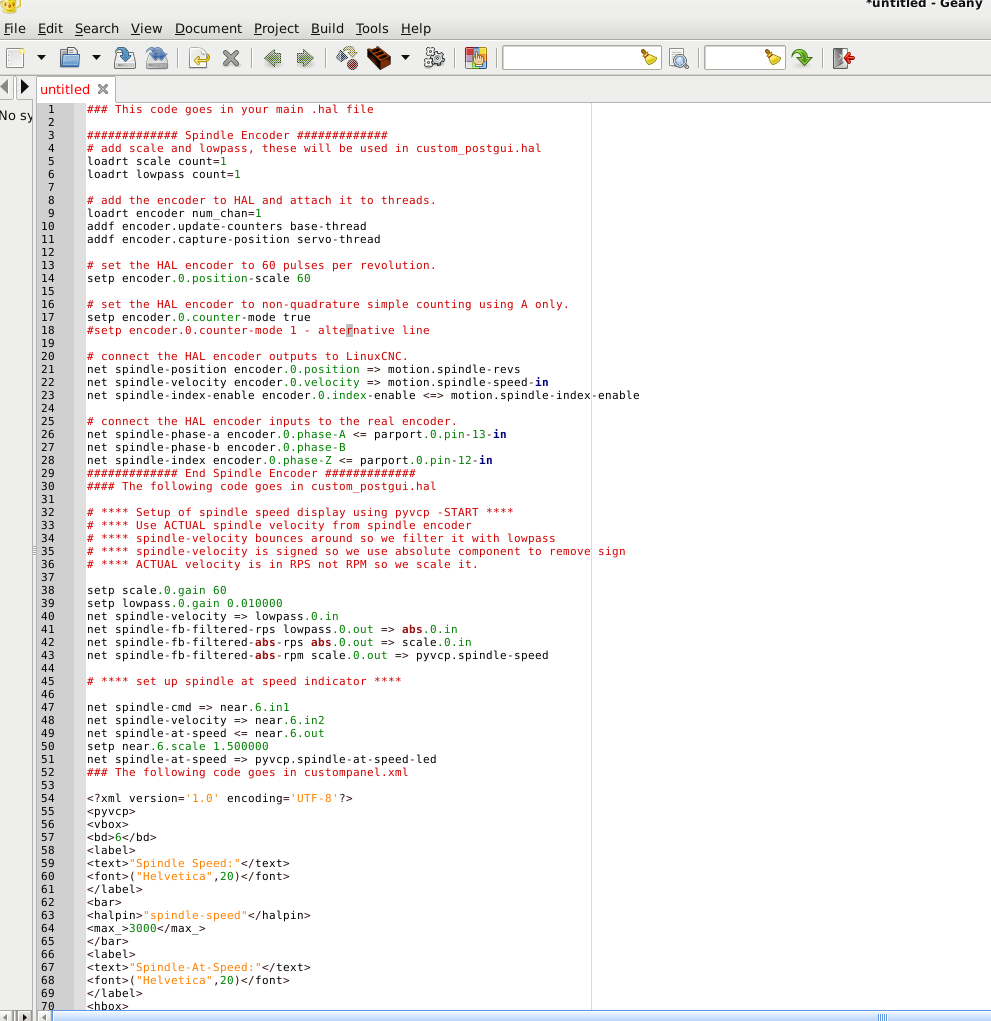
Add your lines to your needs...
# = sign's are comments. (red color)
setp = set parameter
addf = add function
loadrt = loadrealtime
net = make a connection
=> or in your file <=> is only for fun, you can delete this if you want
If you are using parport, my advise is to use stepconfi wizard. Then you will see how to invert signal's by in-not.
I see you have a pyvcp screen designed, that is nice !
Good luck in editing !
Geany is the easyest text editor for your example.
To intall geany type in terminal : apt-get install geany
If this giving nothing type in terminal : sudo apt-get install geany
Then at menu -> document -> set-filetype -> scripting languages -> python source file
Your text is displayed as :
Add your lines to your needs...
# = sign's are comments. (red color)
setp = set parameter
addf = add function
loadrt = loadrealtime
net = make a connection
=> or in your file <=> is only for fun, you can delete this if you want
If you are using parport, my advise is to use stepconfi wizard. Then you will see how to invert signal's by in-not.
I see you have a pyvcp screen designed, that is nice !
Good luck in editing !
Attachments:
The following user(s) said Thank You: Dinuka_Shehan, geewhiz
Please Log in or Create an account to join the conversation.
- Dinuka_Shehan
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 333
- Thank you received: 26
15 Jul 2019 18:52 #139497
by Dinuka_Shehan
Replied by Dinuka_Shehan on topic Update ini and hal file
Are there any tutorial for learning the code names,their meanings and method of using them?
Please Log in or Create an account to join the conversation.
- BigJohnT
-
- Offline
- Administrator
-
Less
More
- Posts: 3990
- Thank you received: 994
15 Jul 2019 21:47 #139507
by BigJohnT
Replied by BigJohnT on topic Update ini and hal file
Yes, the
Documents
and asking specific questions on the forum stating what you did, what you expected, any error messages (copy and paste, no screen shots) and what you got.
JT
JT
The following user(s) said Thank You: Dinuka_Shehan
Please Log in or Create an account to join the conversation.
- geewhiz
- Offline
- New Member
-

Less
More
- Posts: 1
- Thank you received: 0
21 Feb 2021 21:27 - 21 Feb 2021 21:29 #199652
by geewhiz
Replied by geewhiz on topic Update ini and hal file
Grotius
re: Geany
"Then at menu -> document -> set-filetype -> scripting languages -> python source file"
I have been looking all over for this information!!!
I think this will solve one of the many ERRORS I am getting! Like this one.
"joypad_jog_speed.hal:11: Warning: File contains DOS-style line endings."
Do I have to tick "python source file" every time? or is this a default now?
Can I open the files I have already edited and make this change, then re save to fix them?
Thank you, I am very new, and struggling with Linuxcnc.
It just seems so hard to find the information I'm looking for,
and for it to work with the version I'm using.
LinuxCNC:~$ uname -r
4.19.0-13-rt-amd64
LinuxCNC:~$ lsb_release -ic
Distributor ID: Debian
Codename: buster
LINUXCNC - 2.8.1
re: Geany
"Then at menu -> document -> set-filetype -> scripting languages -> python source file"
I have been looking all over for this information!!!
I think this will solve one of the many ERRORS I am getting! Like this one.
"joypad_jog_speed.hal:11: Warning: File contains DOS-style line endings."
Do I have to tick "python source file" every time? or is this a default now?
Can I open the files I have already edited and make this change, then re save to fix them?
Thank you, I am very new, and struggling with Linuxcnc.
It just seems so hard to find the information I'm looking for,
and for it to work with the version I'm using.
LinuxCNC:~$ uname -r
4.19.0-13-rt-amd64
LinuxCNC:~$ lsb_release -ic
Distributor ID: Debian
Codename: buster
LINUXCNC - 2.8.1
Last edit: 21 Feb 2021 21:29 by geewhiz.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21692
- Thank you received: 7414
21 Feb 2021 22:30 #199659
by tommylight
Replied by tommylight on topic Update ini and hal file
It usually (or always) means the file was edited on a windows PC."joypad_jog_speed.hal:11: Warning: File contains DOS-style line endings."
Please Log in or Create an account to join the conversation.
- phillc54
-

- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
21 Feb 2021 22:30 #199660
by phillc54
Replied by phillc54 on topic Update ini and hal file
menu -> Edit -> Preferences -> Files -> Default end of line characters
www.geany.org/documentation/manual/
www.geany.org/documentation/manual/
Please Log in or Create an account to join the conversation.
Time to create page: 0.159 seconds