Control Panel setup
- Duc
- Offline
- Premium Member
-

Less
More
- Posts: 101
- Thank you received: 1
20 Apr 2014 21:18 #46138
by Duc
Hmmmm.
Wonder if Ive run into a limit with mux16 or something. Changing nothing for the code except what servo-thread is turned off I can get the mux output to function.
foincr will work if jogincr, mvoincr, soincr servo threads are commented out
jogincr will work if foincr, mvoincr, soincr servo threads are commented out
if more than one is active then all will fail to operate correctly or at all. The inputs into the mux function will toggle correctly such as jogincr.sel0, jogincr.sel1 ..etc but the jogincr.out -f will not change. I see this with all the outputs for the mux functions.
Replied by Duc on topic Control Panel setup
Here is a hint, comment out the addf then run your config and if your using Axis open the Show Hal Configuration window to see the pin names. If your not running Axis you can open a terminal and say halcmd show pin and that will give you a list of all your pins. Also in the terminal window you can see the functions you created with loadrt and loadusr by saying halcmd show function. These will be the names you need to use with addf.
When you use the name option like:
loadrt mux16 names=jogincr,foincr,mvoincr,soincr
the pin name will be jogincr,foincr,mvoincr,soincr
so the addf line will be
addf jogincr servo-thread
JT
Hmmmm.
Wonder if Ive run into a limit with mux16 or something. Changing nothing for the code except what servo-thread is turned off I can get the mux output to function.
foincr will work if jogincr, mvoincr, soincr servo threads are commented out
jogincr will work if foincr, mvoincr, soincr servo threads are commented out
if more than one is active then all will fail to operate correctly or at all. The inputs into the mux function will toggle correctly such as jogincr.sel0, jogincr.sel1 ..etc but the jogincr.out -f will not change. I see this with all the outputs for the mux functions.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 19162
- Thank you received: 5297
20 Apr 2014 21:49 #46140
by PCW
Replied by PCW on topic Control Panel setup
Maybe a bug in mux16, can you try numbered mux16 instead of named ones?
(mux16.0,mux16.1 etc)
(mux16.0,mux16.1 etc)
Please Log in or Create an account to join the conversation.
- BigJohnT
-

- Offline
- Administrator
-

Less
More
- Posts: 6999
- Thank you received: 1176
21 Apr 2014 01:45 #46147
by BigJohnT
Replied by BigJohnT on topic Control Panel setup
I suspect you still have a coding error. I set up two mux16's using names and they work fine in the 2.5.4 simulator.
my postgui.hal file
my pyvcp-panel.xml file
JT
my postgui.hal file
loadrt mux16 names=fred,barny
addf fred servo-thread
addf barny servo-thread
# setup mux16
setp fred.use-graycode 1
setp fred.in01 1.0
setp fred.in02 2.0
setp fred.in03 3.0
setp fred.in04 4.0
setp fred.in05 5.0
setp fred.in06 6.0
#setp mux16.0.in07 7.0
#setp mux16.0.in08 8.0
setp fred.in09 7.0
setp fred.in10 8.0
setp fred.in11 9.0
setp fred.in12 10.0
setp fred.in13 11.0
setp fred.in14 12.0
setp barny.use-graycode 1
setp barny.in01 1.0
setp barny.in02 2.0
setp barny.in03 3.0
setp barny.in04 4.0
setp barny.in05 5.0
setp barny.in06 6.0
#setp mux16.0.in07 7.0
#setp mux16.0.in08 8.0
setp barny.in09 7.0
setp barny.in10 8.0
setp barny.in11 9.0
setp barny.in12 10.0
setp barny.in13 11.0
setp barny.in14 12.0
# connect the inputs to the wsum component
net bit-1f fred.sel0 <= pyvcp.input-1
net bit-2f fred.sel1 <= pyvcp.input-2
net bit-4f fred.sel2 <= pyvcp.input-3
net bit-8f fred.sel3 <= pyvcp.input-4
net bit-1b barny.sel0 <= pyvcp.input-5
net bit-2b barny.sel1 <= pyvcp.input-6
net bit-4b barny.sel2 <= pyvcp.input-7
net bit-8b barny.sel3 <= pyvcp.input-8
# connect the output to the pyvcp number display
net sum-out-1 pyvcp.mux-out-1 <= fred.out-s
net sum-out-2 pyvcp.mux-out-2 <= barny.out-smy pyvcp-panel.xml file
<?xml version='1.0' encoding='UTF-8'?>
<pyvcp>
<!--
Include your PyVCP panel here.
The contents of this file will not be overwritten when you run stepconf again.
-->
<checkbutton>
<halpin>"input-1"</halpin>
<text>"Input 1"</text>
</checkbutton>
<checkbutton>
<halpin>"input-2"</halpin>
<text>"Input 2"</text>
</checkbutton>
<checkbutton>
<halpin>"input-3"</halpin>
<text>"Input 3"</text>
</checkbutton>
<checkbutton>
<halpin>"input-4"</halpin>
<text>"Input 4"</text>
</checkbutton>
<s32>
<halpin>"mux-out-1"</halpin>
<font>("Helvetica",12)</font>
<format>"4i"</format>
</s32>
<checkbutton>
<halpin>"input-5"</halpin>
<text>"Input 1"</text>
</checkbutton>
<checkbutton>
<halpin>"input-6"</halpin>
<text>"Input 2"</text>
</checkbutton>
<checkbutton>
<halpin>"input-7"</halpin>
<text>"Input 3"</text>
</checkbutton>
<checkbutton>
<halpin>"input-8"</halpin>
<text>"Input 4"</text>
</checkbutton>
<s32>
<halpin>"mux-out-2"</halpin>
<font>("Helvetica",12)</font>
<format>"4i"</format>
</s32>
</pyvcp>JT
Please Log in or Create an account to join the conversation.
- Duc
- Offline
- Premium Member
-
Less
More
- Posts: 101
- Thank you received: 1
21 Apr 2014 08:50 #46158
by Duc
Replied by Duc on topic Control Panel setup
I was able to get the code working by switching to the numbers instead of words. Later on I will try with shorter words to see if that is the problem.
I thank you both for the help you have provide. All the knobs work as much as can be from mux16 till I change to 2.6.
I thank you both for the help you have provide. All the knobs work as much as can be from mux16 till I change to 2.6.
Please Log in or Create an account to join the conversation.
- Duc
- Offline
- Premium Member
-
Less
More
- Posts: 101
- Thank you received: 1
28 Apr 2014 03:12 - 28 Apr 2014 03:13 #46383
by Duc
Replied by Duc on topic Control Panel setup
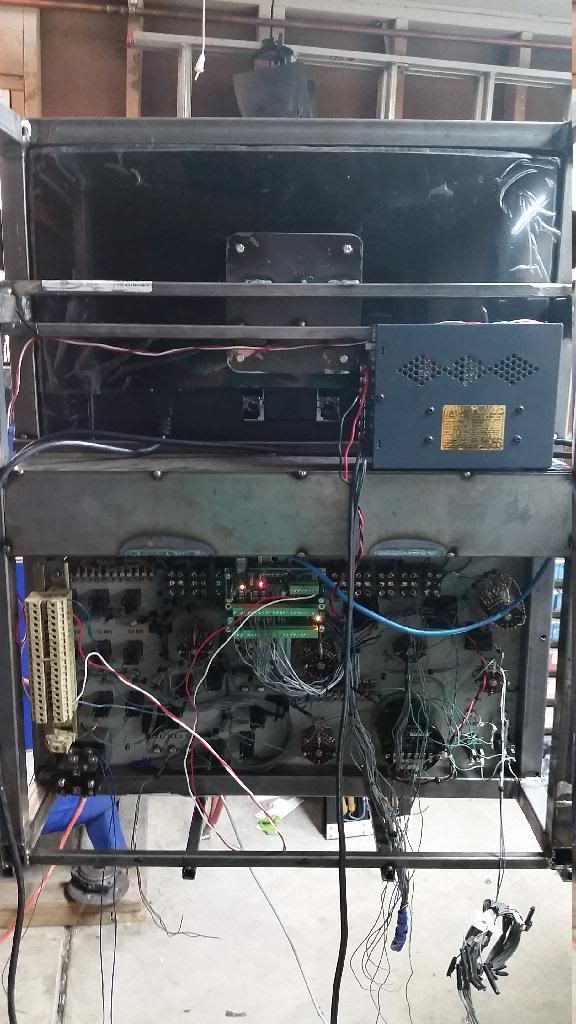
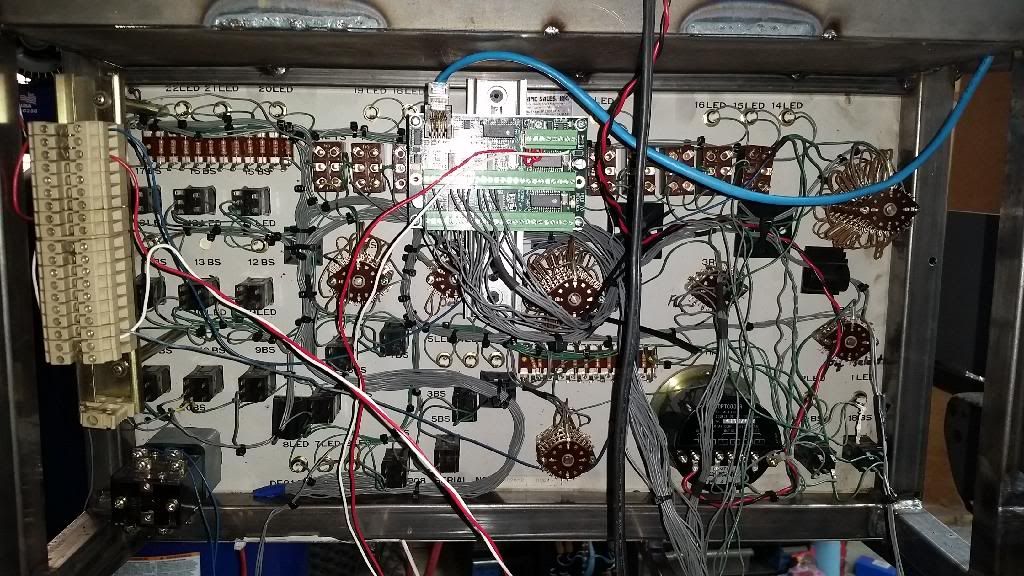
Current pictures of the panel setup. Still finalizing design and wiring before removing everything for painting. The area between the monitor and the panel is for storing dail calipers and other stuff.
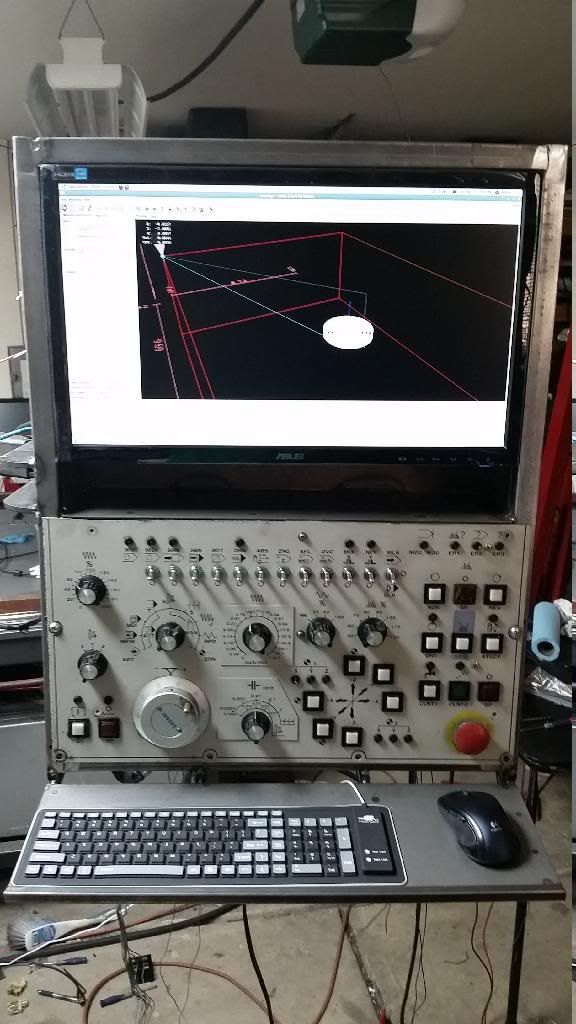
Tons more wiring needs to happen before I consider it done.
I ran a test cut on some AL 7075 for checking the backlash. 3in circle that I will have the QC department at work check on the CMM.
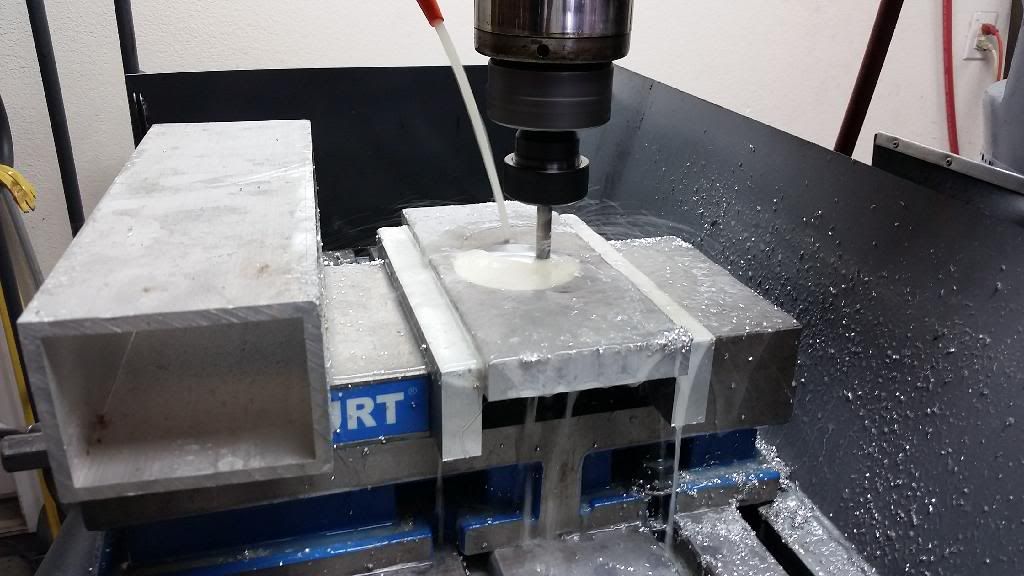
Max feedrate selection works perfect.
Current issues.
Feed override
1. Feed override percent changes on the screen but doesnt effect the feedrate when cutting.
Spindle RPM
Same problem as feed overide. I can see the slider change on the screen but no change in RPM of the spindle. The HZ on the VFD screen doesnt not change with the override percent selected.
Any ideas

Tons more wiring needs to happen before I consider it done.


I ran a test cut on some AL 7075 for checking the backlash. 3in circle that I will have the QC department at work check on the CMM.

Max feedrate selection works perfect.
Current issues.
Feed override
1. Feed override percent changes on the screen but doesnt effect the feedrate when cutting.
Spindle RPM
Same problem as feed overide. I can see the slider change on the screen but no change in RPM of the spindle. The HZ on the VFD screen doesnt not change with the override percent selected.
Any ideas
Last edit: 28 Apr 2014 03:13 by Duc.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Away
- Moderator
-
Less
More
- Posts: 23543
- Thank you received: 5015
28 Apr 2014 04:09 #46388
by andypugh
Does changing the value on-screen have any effect?
Replied by andypugh on topic Control Panel setup
Are you using the Axis intterface? Is it the conventional FO slider that moves, or did you add another one?1. Feed override percent changes on the screen but doesnt effect the feedrate when cutting.
Does changing the value on-screen have any effect?
Please Log in or Create an account to join the conversation.
- Duc
- Offline
- Premium Member
-
Less
More
- Posts: 101
- Thank you received: 1
28 Apr 2014 05:25 #46393
by Duc
Using the axis screen and the conventional FO slider does move. I have not added another one.
I will have to test after dinner if it makes a difference if I move it.
Replied by Duc on topic Control Panel setup
Are you using the Axis intterface? Is it the conventional FO slider that moves, or did you add another one?1. Feed override percent changes on the screen but doesnt effect the feedrate when cutting.
Does changing the value on-screen have any effect?
Using the axis screen and the conventional FO slider does move. I have not added another one.
I will have to test after dinner if it makes a difference if I move it.
Please Log in or Create an account to join the conversation.
- Duc
- Offline
- Premium Member
-
Less
More
- Posts: 101
- Thank you received: 1
28 Apr 2014 06:15 #46398
by Duc
Replied by Duc on topic Control Panel setup
Adjusting the sliders by the way of the mouse does not cause any change in the feedrate or rpm. I wonder if I broke the link between the sliders when I inserted the knob codes.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Away
- Moderator
-
Less
More
- Posts: 23543
- Thank you received: 5015
28 Apr 2014 06:46 #46400
by andypugh
Can we have a look at your HAL file?
Replied by andypugh on topic Control Panel setup
I wonder if I broke the link between the sliders when I inserted the knob codes.
Can we have a look at your HAL file?
Please Log in or Create an account to join the conversation.
- Duc
- Offline
- Premium Member
-
Less
More
- Posts: 101
- Thank you received: 1
28 Apr 2014 06:51 #46401
by Duc
Here is the current .Hal file. The timedelay stuff is commented out due to errors.
Replied by Duc on topic Control Panel setup
I wonder if I broke the link between the sliders when I inserted the knob codes.
Can we have a look at your HAL file?
Here is the current .Hal file. The timedelay stuff is commented out due to errors.
# Generated by PNCconf at Sun Jan 6 10:34:22 2002
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
#loadrt timedelay count=1
loadrt abs count=1
loadrt trivkins
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt probe_parport
loadrt hostmot2
loadrt hm2_pci config=" num_encoders=1 num_pwmgens=0 num_3pwmgens=0 num_stepgens=5 sserial_port_0=0200 "
setp hm2_5i25.0.watchdog.timeout_ns 10000000
loadrt mux16 count=4
loadrt ilowpass
#addf timedelay.0 servo-thread
addf ilowpass.0 servo-thread
addf hm2_5i25.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf mux16.0 servo-thread #jogincr
addf mux16.1 servo-thread #Feedrate overide
addf mux16.2 servo-thread
addf mux16.3 servo-thread
addf hm2_5i25.0.write servo-thread
addf hm2_5i25.0.pet_watchdog servo-thread
addf abs.0 servo-thread
# external output signals
# external input signals
# ---COOLANT CONROL ---
net coolant-flood hm2_5i25.0.7i76.0.0.output-01
# ---LUBRICATION SYSTEM ---
# --- SPINDLE-BRAKE ---
net spindle-brake hm2_5i25.0.7i76.0.0.output-00
#net spindle-brake => timedelay.0.in
#net spindle-delayed timedelay.0.out-b => hm2_5i25.0.7i76.0.0.output-00
#setp timedelay.0.on-delay 3
#setp timedelay.0.off-delay 0
# --- BOTH-HOME-X ---
net both-home-x <= hm2_5i25.0.7i76.0.0.input-00
# --- BOTH-HOME-Y ---
net both-home-y <= hm2_5i25.0.7i76.0.0.input-01
# --- MAX-HOME-Z ---
net max-home-z <= hm2_5i25.0.7i76.0.0.input-03
# --- MIN-Z ---
net min-z <= hm2_5i25.0.7i76.0.0.input-04
# --- JOINT-SELECT-a-X ---
net joint-select-a <= hm2_5i25.0.7i84.0.1.input-00
# --- JOINT-SELECT-b-Y ---
net joint-select-b <= hm2_5i25.0.7i84.0.1.input-01
# --- JOINT-SELECT-c-Z ---
net joint-select-c <= hm2_5i25.0.7i84.0.1.input-02
# --- JOINT-SELECT-d-A ---
net joint-select-d <= hm2_5i25.0.7i84.0.1.input-03
# --- JOG-INCR-A ---
net jog-incr-a <= hm2_5i25.0.7i84.0.1.input-11
# --- JOG-INCR-B ---
net jog-incr-b <= hm2_5i25.0.7i84.0.1.input-10
# --- JOG-INCR-C ---
net jog-incr-c <= hm2_5i25.0.7i84.0.1.input-09
# --- Feedrate overide - FO-INCR-A ---
net fo-incr-a <= hm2_5i25.0.7i84.0.1.input-08
# --- FO-INCR-B ---
net fo-incr-b <= hm2_5i25.0.7i84.0.1.input-07
# --- FO-INCR-C ---
net fo-incr-c <= hm2_5i25.0.7i84.0.1.input-06
# --- FO-INCR-D ---
net fo-incr-d <= hm2_5i25.0.7i84.0.1.input-05
# --- Spindle override - SO-INCR-A ---
net so-incr-a <= hm2_5i25.0.7i84.0.1.input-25
# --- SO-INCR-B ---
net so-incr-b <= hm2_5i25.0.7i84.0.1.input-26
# --- SO-INCR-C ---
net so-incr-c <= hm2_5i25.0.7i84.0.1.input-27
# --- Max velocity override - MVO-INCR-A ---
net mvo-incr-a <= hm2_5i25.0.7i84.0.1.input-20
# --- MVO-INCR-B ---
net mvo-incr-b <= hm2_5i25.0.7i84.0.1.input-21
# --- MVO-INCR-C ---
net mvo-incr-c <= hm2_5i25.0.7i84.0.1.input-22
# --- MVO-INCR-D ---
net mvo-incr-d <= hm2_5i25.0.7i84.0.1.input-23
#*******************
# AXIS X
#*******************
# Step Gen signals/setup
setp hm2_5i25.0.stepgen.00.dirsetup [AXIS_0]DIRSETUP
setp hm2_5i25.0.stepgen.00.dirhold [AXIS_0]DIRHOLD
setp hm2_5i25.0.stepgen.00.steplen [AXIS_0]STEPLEN
setp hm2_5i25.0.stepgen.00.stepspace [AXIS_0]STEPSPACE
setp hm2_5i25.0.stepgen.00.position-scale [AXIS_0]STEP_SCALE
setp hm2_5i25.0.stepgen.00.step_type 0
setp hm2_5i25.0.stepgen.00.control-type 0
setp hm2_5i25.0.stepgen.00.maxaccel 5.0
setp hm2_5i25.0.stepgen.00.maxvel 2.1
net x-pos-fb axis.0.motor-pos-fb <= hm2_5i25.0.stepgen.00.position-fb
net x-pos-cmd axis.0.motor-pos-cmd => hm2_5i25.0.stepgen.00.position-cmd
net x-enable axis.0.amp-enable-out => hm2_5i25.0.stepgen.00.enable
# ---setup home / limit switch signals---
net both-home-x => axis.0.home-sw-in
net both-home-x => axis.0.neg-lim-sw-in
net both-home-x => axis.0.pos-lim-sw-in
#*******************
# AXIS Y
#*******************
# Step Gen signals/setup
setp hm2_5i25.0.stepgen.01.dirsetup [AXIS_1]DIRSETUP
setp hm2_5i25.0.stepgen.01.dirhold [AXIS_1]DIRHOLD
setp hm2_5i25.0.stepgen.01.steplen [AXIS_1]STEPLEN
setp hm2_5i25.0.stepgen.01.stepspace [AXIS_1]STEPSPACE
setp hm2_5i25.0.stepgen.01.position-scale [AXIS_1]STEP_SCALE
setp hm2_5i25.0.stepgen.01.step_type 0
setp hm2_5i25.0.stepgen.01.control-type 0
setp hm2_5i25.0.stepgen.01.maxaccel 2.5
setp hm2_5i25.0.stepgen.01.maxvel 2.1
net y-pos-fb axis.1.motor-pos-fb <= hm2_5i25.0.stepgen.01.position-fb
net y-pos-cmd axis.1.motor-pos-cmd => hm2_5i25.0.stepgen.01.position-cmd
net y-enable axis.1.amp-enable-out => hm2_5i25.0.stepgen.01.enable
# ---setup home / limit switch signals---
net both-home-y => axis.1.home-sw-in
net both-home-y => axis.1.neg-lim-sw-in
net both-home-y => axis.1.pos-lim-sw-in
#*******************
# AXIS Z
#*******************
# Step Gen signals/setup
setp hm2_5i25.0.stepgen.02.dirsetup [AXIS_2]DIRSETUP
setp hm2_5i25.0.stepgen.02.dirhold [AXIS_2]DIRHOLD
setp hm2_5i25.0.stepgen.02.steplen [AXIS_2]STEPLEN
setp hm2_5i25.0.stepgen.02.stepspace [AXIS_2]STEPSPACE
setp hm2_5i25.0.stepgen.02.position-scale [AXIS_2]STEP_SCALE
setp hm2_5i25.0.stepgen.02.step_type 0
setp hm2_5i25.0.stepgen.02.control-type 0
setp hm2_5i25.0.stepgen.02.maxaccel 2.5
setp hm2_5i25.0.stepgen.02.maxvel 2.1
net z-pos-fb axis.2.motor-pos-fb <= hm2_5i25.0.stepgen.02.position-fb
net z-pos-cmd axis.2.motor-pos-cmd => hm2_5i25.0.stepgen.02.position-cmd
net z-enable axis.2.amp-enable-out => hm2_5i25.0.stepgen.02.enable
# ---setup home / limit switch signals---
net max-home-z => axis.2.home-sw-in
net min-z => axis.2.neg-lim-sw-in
net max-home-z => axis.2.pos-lim-sw-in
#*******************
# SPINDLE S
#*******************
# ---digital potentionmeter output signals/setup---
setp hm2_5i25.0.7i76.0.0.spinout-minlim [SPINDLE_9]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i76.0.0.spinout-maxlim [SPINDLE_9]OUTPUT_MAX_LIMIT
setp hm2_5i25.0.7i76.0.0.spinout-scalemax [SPINDLE_9]OUTPUT_SCALE
net abs-vel-cmd abs.0.out => hm2_5i25.0.7i76.0.0.spinout
net spindle-enable => hm2_5i25.0.7i76.0.0.spinena
net spindle-cw => hm2_5i25.0.7i76.0.0.output-04
net spindle-ccw => hm2_5i25.0.7i76.0.0.output-05
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= motion.spindle-speed-out-rps
net spindle-vel-cmd abs.0.in <= motion.spindle-speed-out
net spindle-enable <= motion.spindle-on
net spindle-cw <= motion.spindle-forward
net spindle-ccw <= motion.spindle-reverse
net spindle-brake <= motion.spindle-brake
net spindle-revs => motion.spindle-revs
net spindle-at-speed => motion.spindle-at-speed
net spindle-vel-fb => motion.spindle-speed-in
net spindle-index-enable <=> motion.spindle-index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net joint-select-a halui.joint.0.select
net x-is-homed halui.joint.0.is-homed
net jog-x-pos halui.jog.0.plus
net jog-x-neg halui.jog.0.minus
net jog-x-analog halui.jog.0.analog
net joint-select-b halui.joint.1.select
net y-is-homed halui.joint.1.is-homed
net jog-y-pos halui.jog.1.plus
net jog-y-neg halui.jog.1.minus
net jog-y-analog halui.jog.1.analog
net joint-select-c halui.joint.2.select
net z-is-homed halui.joint.2.is-homed
net jog-z-pos halui.jog.2.plus
net jog-z-neg halui.jog.2.minus
net jog-z-analog halui.jog.2.analog
net jog-selected-pos halui.jog.selected.plus
net jog-selected-neg halui.jog.selected.minus
net spindle-manual-cw halui.spindle.forward
net spindle-manual-ccw halui.spindle.reverse
net spindle-manual-stop halui.spindle.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---jog button signals---
sets jog-speed 1.000000
## MPG stuff##########
# ---jogwheel signals to mesa encoder - shared MPG---
net joint-selected-count <= hm2_5i25.0.7i84.0.1.enc0
setp hm2_5i25.0.encoder.00.filter true
setp hm2_5i25.0.encoder.00.counter-mode true
# ---mpg signals---
# for axis x MPG
setp axis.0.jog-vel-mode 0
net selected-jog-incr => axis.0.jog-scale
net joint-select-a => axis.0.jog-enable
net joint-selected-count => axis.0.jog-counts
# for axis y MPG
setp axis.1.jog-vel-mode 0
net selected-jog-incr => axis.1.jog-scale
net joint-select-b => axis.1.jog-enable
net joint-selected-count => axis.1.jog-counts
# for axis z MPG
setp axis.2.jog-vel-mode 0
net selected-jog-incr => axis.2.jog-scale
net joint-select-c => axis.2.jog-enable
net joint-selected-count => axis.2.jog-counts
##connect jog incr override increments
net jog-incr-a => mux16.0.sel0
net jog-incr-b => mux16.0.sel1
net jog-incr-c => mux16.0.sel2
net jog-incr-d => mux16.0.sel3
net selected-jog-incr <= mux16.0.out-f
setp mux16.0.debounce-time 0.200000
setp mux16.0.use-graycode False
setp mux16.0.suppress-no-input False
setp mux16.0.in00 0.0001
setp mux16.0.in01 0.001
setp mux16.0.in02 .01
setp mux16.0.in03 .1
setp mux16.0.in04 1
# connect feed overide increments - switches
setp halui.feed-override.count-enable true
setp halui.feed-override.direct-value true
setp halui.feed-override.scale .01
net feedoverride-incr => halui.feed-override.counts
net fo-incr-a => mux16.1.sel0
net fo-incr-b => mux16.1.sel1
net fo-incr-c => mux16.1.sel2
net fo-incr-d => mux16.1.sel3
net feedoverride-incr <= mux16.1.out-s
setp mux16.1.debounce-time 0.200000
setp mux16.1.use-graycode False
setp mux16.1.suppress-no-input False
setp mux16.1.in00 0.000000
setp mux16.1.in01 10.000000
setp mux16.1.in02 20.000000
setp mux16.1.in03 30.000000
setp mux16.1.in04 40.000000
setp mux16.1.in05 50.000000
setp mux16.1.in06 60.000000
setp mux16.1.in07 70.000000
setp mux16.1.in08 80.000000
setp mux16.1.in09 90.000000
setp mux16.1.in10 100.000000
setp mux16.1.in11 110.000000
setp mux16.1.in12 120.000000
setp mux16.1.in13 130.000000
setp mux16.1.in14 140.000000
setp mux16.1.in15 150.000000
# connect max velocity overide increments - switches
setp halui.max-velocity.count-enable true
setp halui.max-velocity.direct-value true
setp halui.max-velocity.scale 0.016670
net max-vel-override-incr => halui.max-velocity.counts
net mvo-incr-a => mux16.2.sel0
net mvo-incr-b => mux16.2.sel1
net mvo-incr-c => mux16.2.sel2
net mvo-incr-d => mux16.2.sel3
net max-vel-override-incr <= mux16.2.out-s
setp mux16.2.debounce-time 0.200000
setp mux16.2.use-graycode False
setp mux16.2.suppress-no-input False
setp mux16.2.in00 0.000000
setp mux16.2.in01 1.000000
setp mux16.2.in02 2.000000
setp mux16.2.in03 4.00000
setp mux16.2.in04 6.00000
setp mux16.2.in05 8.00000
setp mux16.2.in06 10.00000
setp mux16.2.in07 20.00000
setp mux16.2.in08 30.00000
setp mux16.2.in09 40.00000
setp mux16.2.in10 50.00000
setp mux16.2.in11 60.00000
setp mux16.2.in12 70.0000
setp mux16.2.in13 80.0000
setp mux16.2.in14 90.0000
setp mux16.2.in15 100.0000
# connect spindle overide increments
setp halui.spindle-override.count-enable true
setp halui.spindle-override.direct-value true
setp halui.spindle-override.scale .01
net spindleoverride-incr => halui.spindle-override.counts
net so-incr-a => mux16.3.sel0
net so-incr-b => mux16.3.sel1
net so-incr-c => mux16.3.sel2
net spindleoverride-incr <= mux16.3.out-s
setp mux16.3.debounce-time 0.200000
setp mux16.3.use-graycode False
setp mux16.3.suppress-no-input False
setp mux16.3.in00 100.000000
setp mux16.3.in01 90.000000
setp mux16.3.in02 70.000000
setp mux16.3.in03 80.000000
setp mux16.3.in04 110.000000
setp mux16.3.in05 120.000000
setp mux16.3.in06 60.000000
setp mux16.3.in07 50.000000
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Please Log in or Create an account to join the conversation.
Time to create page: 0.130 seconds