Duplomatic BSV N 160 Werkzeugwechsler / Turret
- Gommiswald
- Offline
- Junior Member
-

Less
More
- Posts: 32
- Thank you received: 0
31 Mar 2020 19:52 #162291
by Gommiswald
Replied by Gommiswald on topic Duplomatic BSV N 160 Werkzeugwechsler / Turret
The bit signals are the same, but only used until 8. And thanks for the text for duplo.comp. I will change it.
Sorry when I ask again because of compilation. When I made that with halcompile, then I get I entry in /usr/bin with name duplo. And that is all. Is that correct or have I to copy manually the duplo.comp in specific directory? Maybe to /usr/lib/linuxcnc/modules. Maybe you can take a look at your directories.
Daniel
Sorry when I ask again because of compilation. When I made that with halcompile, then I get I entry in /usr/bin with name duplo. And that is all. Is that correct or have I to copy manually the duplo.comp in specific directory? Maybe to /usr/lib/linuxcnc/modules. Maybe you can take a look at your directories.
Daniel
Please Log in or Create an account to join the conversation.
- bruno2626
- Offline
- Senior Member
-

Less
More
- Posts: 50
- Thank you received: 3
01 Apr 2020 08:48 #162335
by bruno2626
Replied by bruno2626 on topic Duplomatic BSV N 160 Werkzeugwechsler / Turret
Hi,
Sorry for my poor English, I am French. I'm not sure I understood your problem.
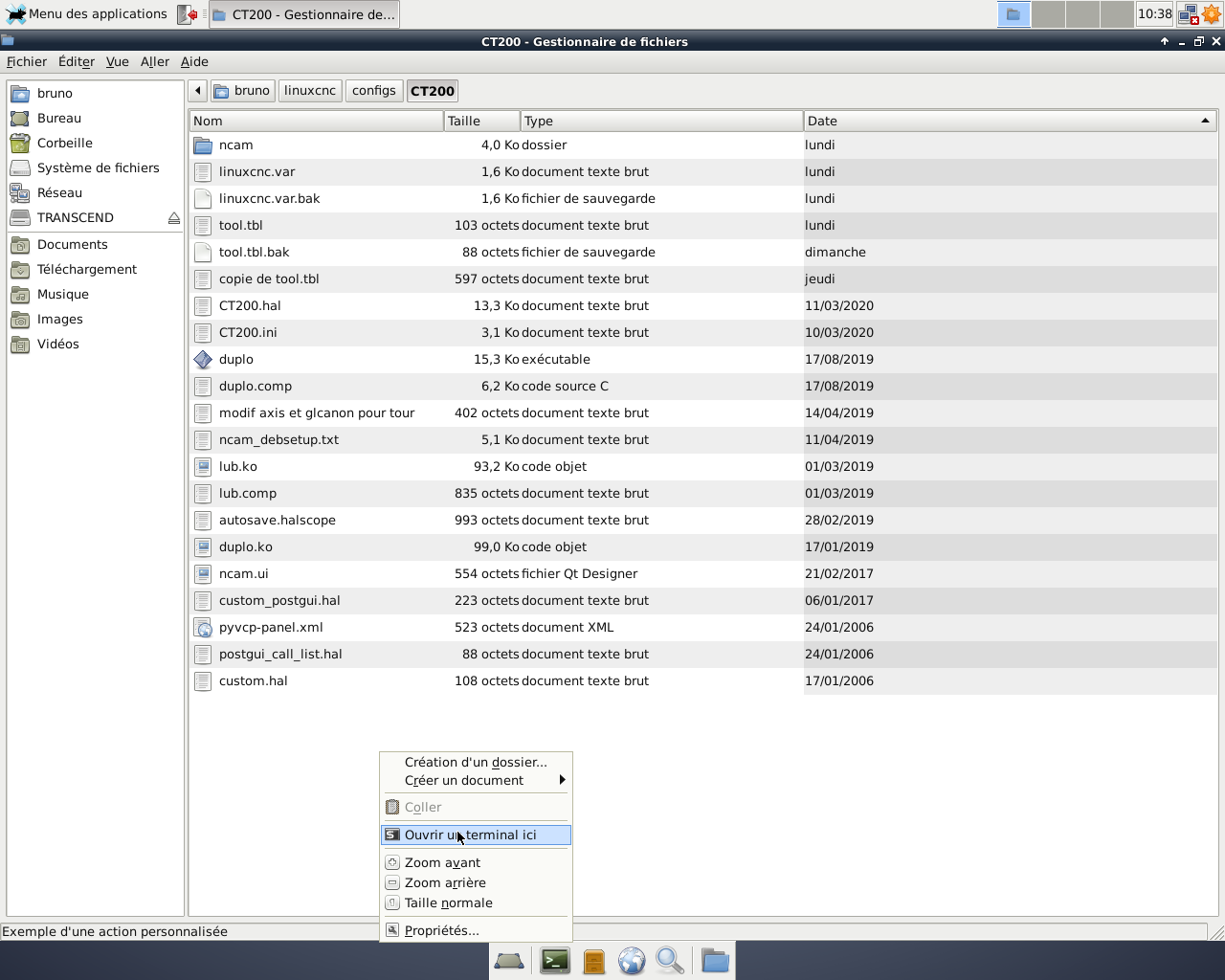
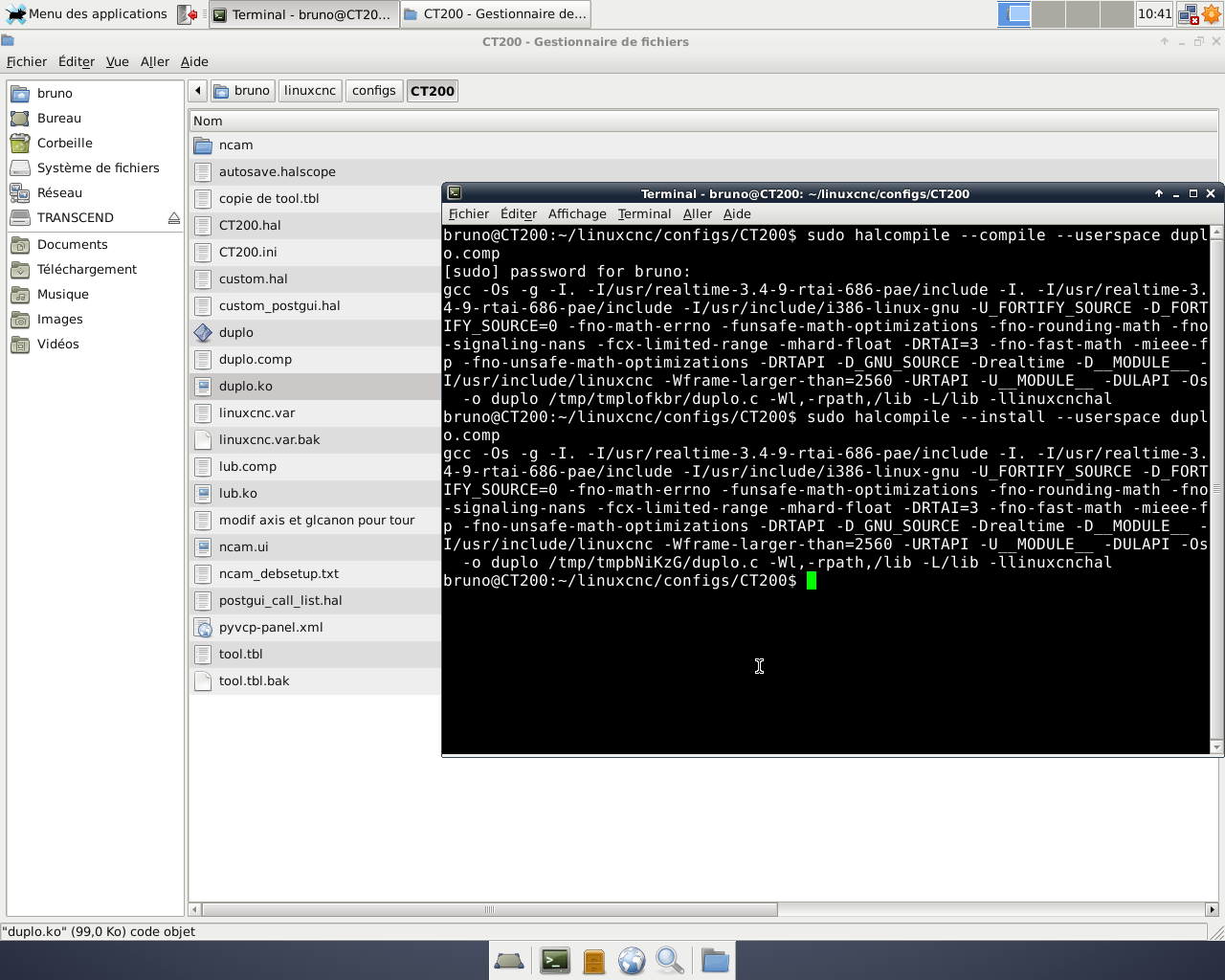
Here are two screenshots.
Duplo.comp can be in the same folder as your current config (with the hal and ini files).
Sorry for my poor English, I am French. I'm not sure I understood your problem.
Here are two screenshots.
Duplo.comp can be in the same folder as your current config (with the hal and ini files).
Please Log in or Create an account to join the conversation.
- inoxix
- Offline
- New Member
-

Less
More
- Posts: 11
- Thank you received: 1
01 Apr 2020 10:18 - 01 Apr 2020 14:06 #162344
by inoxix
Replied by inoxix on topic Duplomatic BSV N 160 Werkzeugwechsler / Turret
Hi Bruno,
I tried to compile the component on a 2.8-rtpreempt system and it does not compile. Well it does, but only creates duplo file in /usr/bin and not a .so in /usr/lib/linuxcnc/modules/ like other comps.
I see in your output that you have a rtai setup. Did you ever try with rtpreempt?
Is there a reason that you use the option "option userspace yes", it doesn't seem to be so common anymore.
BR
Tom
I tried to compile the component on a 2.8-rtpreempt system and it does not compile. Well it does, but only creates duplo file in /usr/bin and not a .so in /usr/lib/linuxcnc/modules/ like other comps.
I see in your output that you have a rtai setup. Did you ever try with rtpreempt?
Is there a reason that you use the option "option userspace yes", it doesn't seem to be so common anymore.
BR
Tom
Last edit: 01 Apr 2020 14:06 by inoxix.
Please Log in or Create an account to join the conversation.
- inoxix
- Offline
- New Member
-
Less
More
- Posts: 11
- Thank you received: 1
01 Apr 2020 15:49 #162353
by inoxix
Replied by inoxix on topic Duplomatic BSV N 160 Werkzeugwechsler / Turret
In the meantime I changed to comp using the reatime function FUNCTION(_) and reduced the tool number to 8.
Let's see how the tests from Daniel work.
BR
Tom
Let's see how the tests from Daniel work.
BR
Tom
Please Log in or Create an account to join the conversation.
- gaston48
- Offline
- Premium Member
-

Less
More
- Posts: 112
- Thank you received: 5
01 Apr 2020 16:58 #162358
by gaston48
Replied by gaston48 on topic Duplomatic BSV N 160 Werkzeugwechsler / Turret
Is there a reason that you use the option "option userspace yes", it doesn't seem to be so common anymore.
Hi,
when a component has a lot of time-delayed logic, it is not reliable in realtime, code parts are not taken into account.
In userspace, we are free to do what we want.
sorry for my google english ...
Hi,
when a component has a lot of time-delayed logic, it is not reliable in realtime, code parts are not taken into account.
In userspace, we are free to do what we want.
sorry for my google english ...
Please Log in or Create an account to join the conversation.
- Gommiswald
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
03 Apr 2020 19:09 #162605
by Gommiswald
Replied by Gommiswald on topic Duplomatic BSV N 160 Werkzeugwechsler / Turret
Hi
First I've tried the dulo.comp of Bruno. Didn't work as it should. I think it is a problem of the locking switch. Then I tried the realtime Comp of Thomas. No reaction of the Turret.
So I will move a little bit the placing of the locking switch, so it will change the state a little bit earlier. If I understand well the sequence: After the turret is in position, then the motor should for 200ms turn CCW. Does it matter, if the locking switch changes the state in between these 200ms? After these 200ms the indexing solenoid should open, motor should stop and motor brake should tighten. Is that so?
BR and thanks for all your help!
Daniel
First I've tried the dulo.comp of Bruno. Didn't work as it should. I think it is a problem of the locking switch. Then I tried the realtime Comp of Thomas. No reaction of the Turret.
So I will move a little bit the placing of the locking switch, so it will change the state a little bit earlier. If I understand well the sequence: After the turret is in position, then the motor should for 200ms turn CCW. Does it matter, if the locking switch changes the state in between these 200ms? After these 200ms the indexing solenoid should open, motor should stop and motor brake should tighten. Is that so?
BR and thanks for all your help!
Daniel
Please Log in or Create an account to join the conversation.
- Gommiswald
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
05 Apr 2020 19:09 #162788
by Gommiswald
Replied by Gommiswald on topic Duplomatic BSV N 160 Werkzeugwechsler / Turret
Hi
I tried again the duplo,comp. But it is true, the MESA card is too weak to connect directly the indexing solenoid and the motor brake. I must connect these components to a relais.
Until now: Sometimes the turret moves nearly correct. But then, about 30s after locking, the turret begins to turn again, locks again and so on. Strange...
This Duplomatic ist really not so easy to configure.
Daniel
I tried again the duplo,comp. But it is true, the MESA card is too weak to connect directly the indexing solenoid and the motor brake. I must connect these components to a relais.
Until now: Sometimes the turret moves nearly correct. But then, about 30s after locking, the turret begins to turn again, locks again and so on. Strange...
This Duplomatic ist really not so easy to configure.
Daniel
Please Log in or Create an account to join the conversation.
- bruno2626
- Offline
- Senior Member
-
Less
More
- Posts: 50
- Thank you received: 3
13 Apr 2020 07:35 #163848
by bruno2626
Replied by bruno2626 on topic Duplomatic BSV N 160 Werkzeugwechsler / Turret
Hi,
Sorry for my silence, I'm very busy right now.
You should use halscope with all the turret entrances and exits to figure out what's going on. You can post screenshots.
The difficulty comes from the fact that everything goes very fast.
The rotation is reversed until it locks. The delay of 200ms is after this locking.
It takes time to fully understand the time cycle of your document (page 16).
There is a screw behind the motor to turn it manually. By pressing the indexer by hand, you can check if you can manually lock the turret. You have to feel by turning the motor that there is a spring inside, it takes several turns to feel the lock.
Is the VDI disc present? Its inertia is important for locking.
Good luck!
Sorry for my silence, I'm very busy right now.
You should use halscope with all the turret entrances and exits to figure out what's going on. You can post screenshots.
The difficulty comes from the fact that everything goes very fast.
The rotation is reversed until it locks. The delay of 200ms is after this locking.
It takes time to fully understand the time cycle of your document (page 16).
There is a screw behind the motor to turn it manually. By pressing the indexer by hand, you can check if you can manually lock the turret. You have to feel by turning the motor that there is a spring inside, it takes several turns to feel the lock.
Is the VDI disc present? Its inertia is important for locking.
Good luck!
Please Log in or Create an account to join the conversation.
- Gommiswald
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
13 Apr 2020 20:11 #163898
by Gommiswald
Replied by Gommiswald on topic Duplomatic BSV N 160 Werkzeugwechsler / Turret
Hi Bruno
Now the Duplomatic works fine. I had to change a little bit the dulo.comp (we renamed it to duplo8.comp, becaus I have a Duplomatic with 8 places. I had a problem with the comp, because at the end of case 3 the state didn't change to 0. So I made a State 4 and a case 4 which changes the state to 0. So it works fine.
In the attachment you find the duplo8.comp.
Again - thank you very much. With your help I was able to manage the Duplomatic Turret.
Meilleures salutations
Daniel
Now the Duplomatic works fine. I had to change a little bit the dulo.comp (we renamed it to duplo8.comp, becaus I have a Duplomatic with 8 places. I had a problem with the comp, because at the end of case 3 the state didn't change to 0. So I made a State 4 and a case 4 which changes the state to 0. So it works fine.
In the attachment you find the duplo8.comp.
Again - thank you very much. With your help I was able to manage the Duplomatic Turret.
Meilleures salutations
Daniel
Attachments:
Please Log in or Create an account to join the conversation.
- Gommiswald
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
28 Nov 2020 11:03 #190504
by Gommiswald
Replied by Gommiswald on topic Duplomatic BSV N 160 Werkzeugwechsler / Turret
Good morning
Now my Duplomatic works fine and also the rest of my EmcoTurn 240. But I'm brooding over another question. My Duplomatic has only 8 pockets, but I have about 30 toolholders. Is there a possibility to manage that? Because in the tooltable in LinuxCNC you have to assign each tool to a different pocket. So it is not possible to put two tools on pocket 1, for example.
Any idea?
Thanks to all and best regards
Daniel
Now my Duplomatic works fine and also the rest of my EmcoTurn 240. But I'm brooding over another question. My Duplomatic has only 8 pockets, but I have about 30 toolholders. Is there a possibility to manage that? Because in the tooltable in LinuxCNC you have to assign each tool to a different pocket. So it is not possible to put two tools on pocket 1, for example.
Any idea?
Thanks to all and best regards
Daniel
Please Log in or Create an account to join the conversation.
Moderators: piasdom
Time to create page: 0.287 seconds