W5100S-EVB-PICO stepgenerator and encoder driver
- COFHAL
- Offline
- Platinum Member
-

Less
More
- Posts: 455
- Thank you received: 61
26 May 2025 19:33 #329178
by COFHAL
Replied by COFHAL on topic W5100S-EVB-PICO stepgenerator and encoder driver
What is the bianari file for the normal RP pico?
stepper-ninja-W5500 or stepper-ninja-W5500S
stepper-ninja-W5500 or stepper-ninja-W5500S
Please Log in or Create an account to join the conversation.
- atrex77
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

Less
More
- Posts: 45
- Thank you received: 24
27 May 2025 07:40 - 27 May 2025 07:47 #329193
by atrex77
Replied by atrex77 on topic W5100S-EVB-PICO stepgenerator and encoder driver
the stepper-ninja-w5500.uf2 is the file you need if you make like this.
the pico only is not enough, you need a w5500 module also, or a W5100S-EVB-PICO

the pico only is not enough, you need a w5500 module also, or a W5100S-EVB-PICO
Attachments:
Last edit: 27 May 2025 07:47 by atrex77.
Please Log in or Create an account to join the conversation.
- michaeln
- Offline
- Senior Member
-
Less
More
- Posts: 40
- Thank you received: 14
29 May 2025 18:44 - 29 May 2025 18:54 #329381
by michaeln
Replied by michaeln on topic W5100S-EVB-PICO stepgenerator and encoder driver
Hello atrex77,
this is a very nice project. I found this video , it looks fantastic.
A very fast LinuxCNC-Board for low cost.
You made a very good job, but is it useful in practice?
I think there are not enough input and output free.
In my opinion you need for a machine:
- for each axis 2 inputs (one side switch for reference and limit together, other side only limit)
- one input and one output for e-stop
- one output for enable the spindle additional to the PWM
- one output for the coolant
- if you have a machine enclosure, you need one input for the switch and one for enable the drives.
What do you think about this? Do you use it in an other way?
Do you already have a solution in your mind?
this is a very nice project. I found this video , it looks fantastic.
A very fast LinuxCNC-Board for low cost.
You made a very good job, but is it useful in practice?
I think there are not enough input and output free.
In my opinion you need for a machine:
- for each axis 2 inputs (one side switch for reference and limit together, other side only limit)
- one input and one output for e-stop
- one output for enable the spindle additional to the PWM
- one output for the coolant
- if you have a machine enclosure, you need one input for the switch and one for enable the drives.
What do you think about this? Do you use it in an other way?
Do you already have a solution in your mind?
Last edit: 29 May 2025 18:54 by michaeln.
The following user(s) said Thank You: atrex77, COFHAL
Please Log in or Create an account to join the conversation.
- atrex77
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 45
- Thank you received: 24
30 May 2025 18:33 - 30 May 2025 18:50 #329403
by atrex77
Replied by atrex77 on topic W5100S-EVB-PICO stepgenerator and encoder driver
the repo in the github configured like this:
you get:
4 step-generator
1 encoder-counter
gpio input pins (10, 11, 22, 26, 27, 28)
gpio output pins (12, 13, 15)
1 pwm channell (gp14)
so you can use it with a cheap printerpot breakout board. i currently working on a breakout board mixed with the io-samurai project to add +8 digital output and 16 digital inputs to this ().
but you can configure other ways if you want, more encoders for less inputs or no ecoder for extra 2 input or output. the hal driver uses the same configuration file so only 1 place change is need to change the configuration.
The configuration file is in the repo (firmware/w5100s-evb-pico/inc/config.h)
or if you want much more inputs and outputs use my io-samurai project, open source with the PCB production files. (only works with the W5100S-EVB-PICO or equivalent pico + w5100s breakout board)
if you want faster response please use the discord link in the repo.

you get:
4 step-generator
1 encoder-counter
gpio input pins (10, 11, 22, 26, 27, 28)
gpio output pins (12, 13, 15)
1 pwm channell (gp14)
so you can use it with a cheap printerpot breakout board. i currently working on a breakout board mixed with the io-samurai project to add +8 digital output and 16 digital inputs to this ().
but you can configure other ways if you want, more encoders for less inputs or no ecoder for extra 2 input or output. the hal driver uses the same configuration file so only 1 place change is need to change the configuration.
The configuration file is in the repo (firmware/w5100s-evb-pico/inc/config.h)
or if you want much more inputs and outputs use my io-samurai project, open source with the PCB production files. (only works with the W5100S-EVB-PICO or equivalent pico + w5100s breakout board)
if you want faster response please use the discord link in the repo.
Attachments:
Last edit: 30 May 2025 18:50 by atrex77.
The following user(s) said Thank You: tommylight, COFHAL
Please Log in or Create an account to join the conversation.
- COFHAL
- Offline
- Platinum Member
-
Less
More
- Posts: 455
- Thank you received: 61
31 May 2025 00:41 #329418
by COFHAL
Replied by COFHAL on topic W5100S-EVB-PICO stepgenerator and encoder driver
It would be very useful to add the INDEX input to the encoders, if you want to use oriented spindle or the lathe to do threading.
Please Log in or Create an account to join the conversation.
- atrex77
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 45
- Thank you received: 24
31 May 2025 11:52 - 31 May 2025 12:00 #329440
by atrex77
Replied by atrex77 on topic W5100S-EVB-PICO stepgenerator and encoder driver
in the near future. The stepper-ninja hal driver run in the servo-thread so the minimum width of one input is 1 servo thread refresh in length, with 1KHz servo-thread its 1mS, something like this: when you see a ruler, all 1mm division represents a servo thread cycle, the signal only starts in the divisions and only end on the divisions. With low spindle speed its probably working, but if you want better threading you use printer port for the lathe spindle encoder.
Last edit: 31 May 2025 12:00 by atrex77.
Please Log in or Create an account to join the conversation.
- atrex77
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 45
- Thank you received: 24
02 Jun 2025 11:19 - 02 Jun 2025 11:21 #329547
by atrex77
Replied by atrex77 on topic W5100S-EVB-PICO stepgenerator and encoder driver
a full revision on the previous PCB:
All 24v inputs and outputs optical isolated, PWM exchanged to 12Bit DA controller for the analog output.
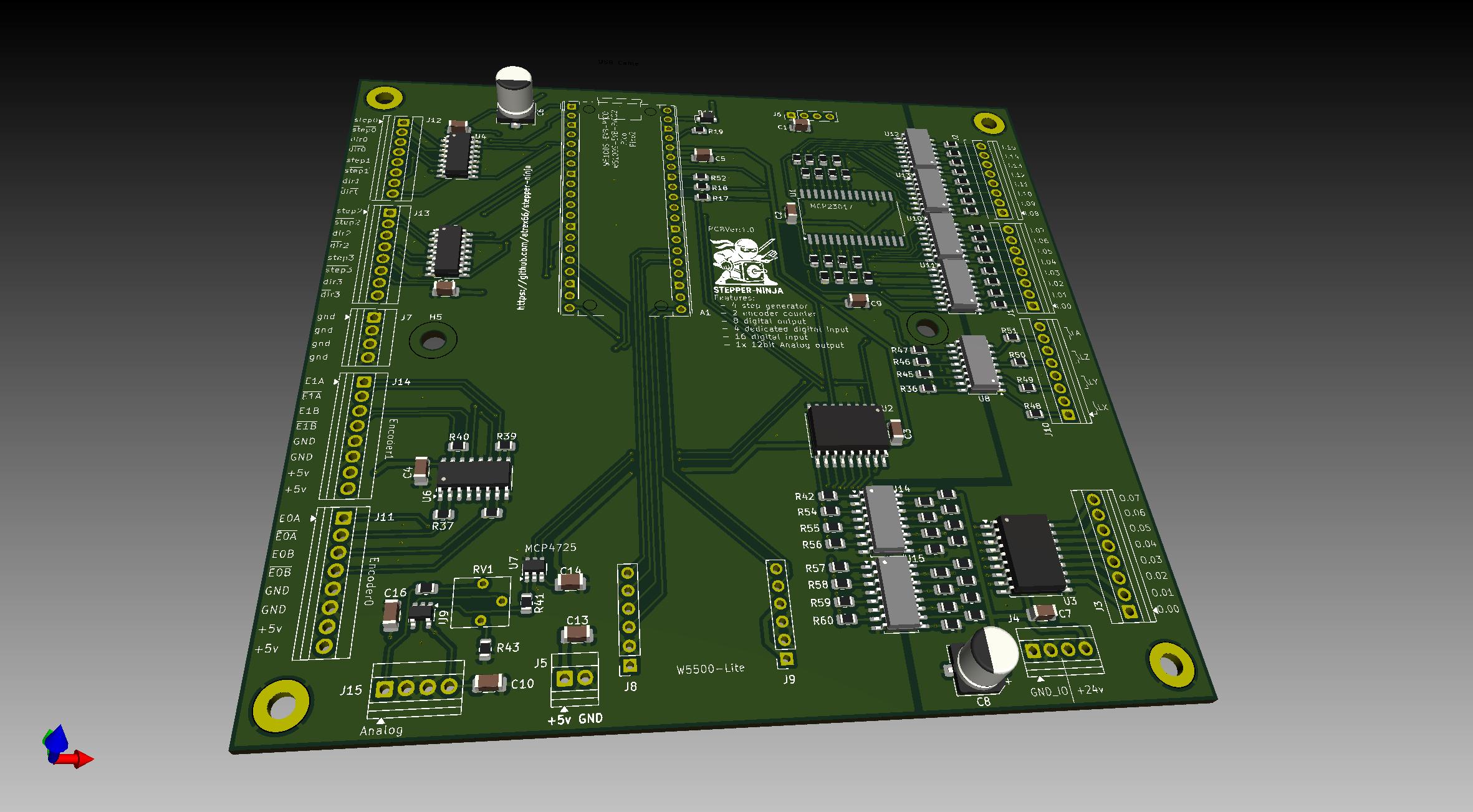
All 24v inputs and outputs optical isolated, PWM exchanged to 12Bit DA controller for the analog output.
Attachments:
Last edit: 02 Jun 2025 11:21 by atrex77.
The following user(s) said Thank You: meister, kzali
Please Log in or Create an account to join the conversation.
- atrex77
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 45
- Thank you received: 24
02 Jun 2025 23:18 #329574
by atrex77
Replied by atrex77 on topic W5100S-EVB-PICO stepgenerator and encoder driver
guys, a littlebit of play with the design is get the ninja look. ")
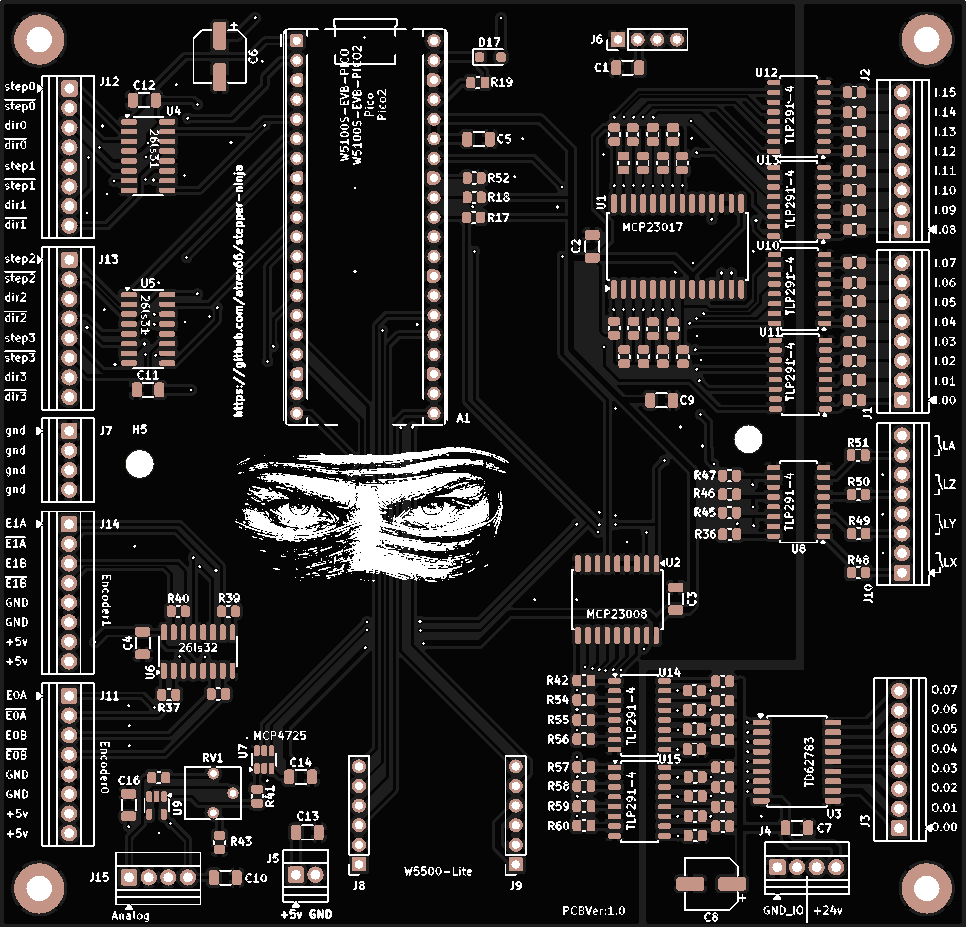
Attachments:
Please Log in or Create an account to join the conversation.
- atrex77
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 45
- Thank you received: 24
06 Jun 2025 11:58 #329806
by atrex77
Replied by atrex77 on topic W5100S-EVB-PICO stepgenerator and encoder driver
if you want to try i added dedicated hal pin to the spindle encoder index, you can connect it to any input pin, and you can define in the config.h and also set the active level of the signal to active low or active high.
The following user(s) said Thank You: COFHAL
Please Log in or Create an account to join the conversation.
- COFHAL
- Offline
- Platinum Member
-
Less
More
- Posts: 455
- Thank you received: 61
06 Jun 2025 23:45 #329850
by COFHAL
Replied by COFHAL on topic W5100S-EVB-PICO stepgenerator and encoder driver
That's what I thought, the problem is that many drivers have differential feedback encoder outputs and I would have to use another IC to convert +Z - Z to Z.
Please Log in or Create an account to join the conversation.
Moderators: PCW, jmelson
Time to create page: 0.215 seconds