Hello I am new here
- kmrs75
- Offline
- New Member
-

- Posts: 2
- Thank you received: 0
I just wanted to introduce myself and off course ask some questions.
My name is ken I am new to the cnc world but i am not new to linux and other coding.
I helped build a linux program for HPGL code (vinyl cutters and engravers). We use the program everyday in our business.
I have used that program to design and make shirts banners and signs for different linux groups.
I have wanted to get into the cnc field for some time now. I finally am able to. I acquired a home made CNC machine last week and I hope to get it to work.
It has geck drives G320 and motors and encoders from Globe Motors the encoders are AVAGO TECHNOLOGIES - HEDS-5500#A06
This CNC has never work from what i was told everything is new. It has been sitting for a few years.
I have gone thru the setup from geck and i am not sure if I did it right the voltages dont look that great when i do my testing.
as of right now i turn it on and it starts to move and will not stop. i think its the encoders that are bad. how could i test them to verify that?
Thanks ken
Please Log in or Create an account to join the conversation.
- BigJohnT
-

- Offline
- Administrator
-

- Posts: 6999
- Thank you received: 1176
Did you follow the steps here ?
Do you have the step and direction inputs connected and LinuxCNC in control before you power up the servos?
It appears that the G320 uses open ended connections so make sure you A and B are connected to the G320 and not the A~ and B~ or whatever they are marked.
You could connect the encoder to the parallel port I think and provide a 5v power source for the encoder power.
Do you have a photo of your setup?
John
Please Log in or Create an account to join the conversation.
- kmrs75
- Offline
- New Member
-
- Posts: 2
- Thank you received: 0
Did you follow the steps here?yes but when i got to STEP 3: TESTING THE ENCODER
At this point the encoder should be tested for functionality. You can test the encoder on the G320X by watching the indicator LEDs on the board.
Turn on the power supply The FAULT indicator (red LED) should be on for 1 second and then turn off. IT NEVER TURNS ON The IN-POSITION indicator (green LED) I DONT HAVE A GREEN LED should turn on and remain on. The POWER indicator (green LED) should always be on. Turn the motor shaft VERY
slowly by hand. The IN-POSITION indicator (green LED) will turn off when you turn the motor more than two encoder counts. The Warn indicator (yellow LED) NO YELLOW LED EITHER will turn on when you have turned the motor more than 128 encoder counts. The FAULT indicator (red LED) will turn on when you turn the motor past the following error limit (see option switch section). After 1 second the FAULT light will turn off and the IN-POSITION LED will come back on.
Do you have the step and direction inputs connected and LinuxCNC in control before you power up the servos? YES
It appears that the G320 uses open ended connections so make sure you A and B are connected to the G320 and not the A~ and B~ or whatever they are marked. controller it is marked phase A phase B encoder it it called Channel A channel B i have them connected to eachother A-A B-B
You could connect the encoder to the parallel port I think and provide a 5v power source for the encoder power. my power supply have 5 volts that i am inputing to the controller then it is sending it to the encoder
Do you have a photo of your setup?following photos
I am only trying to get X axis to work right now so that is what everything is going to be referred too
Image 1.jpg = parallel port

pin1 not used
pin 2 not used
pin 3 X dir
pin 4 X step
pin 5 Y dir
pin 6 Y step
pin 7 Z dir
pin 8 Z step
image 2.jpg
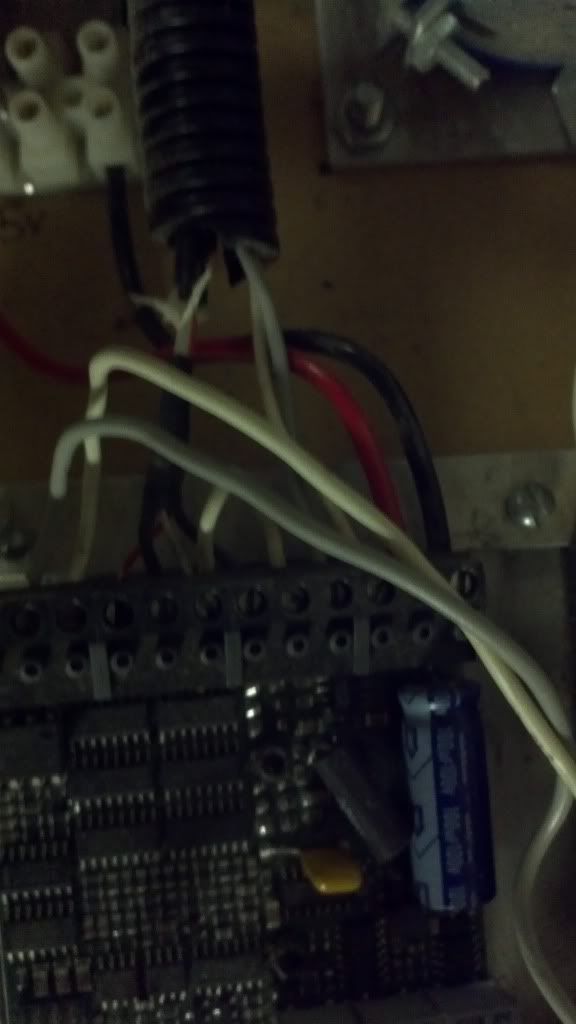
Geckodrive wired correct per instructions
image 3
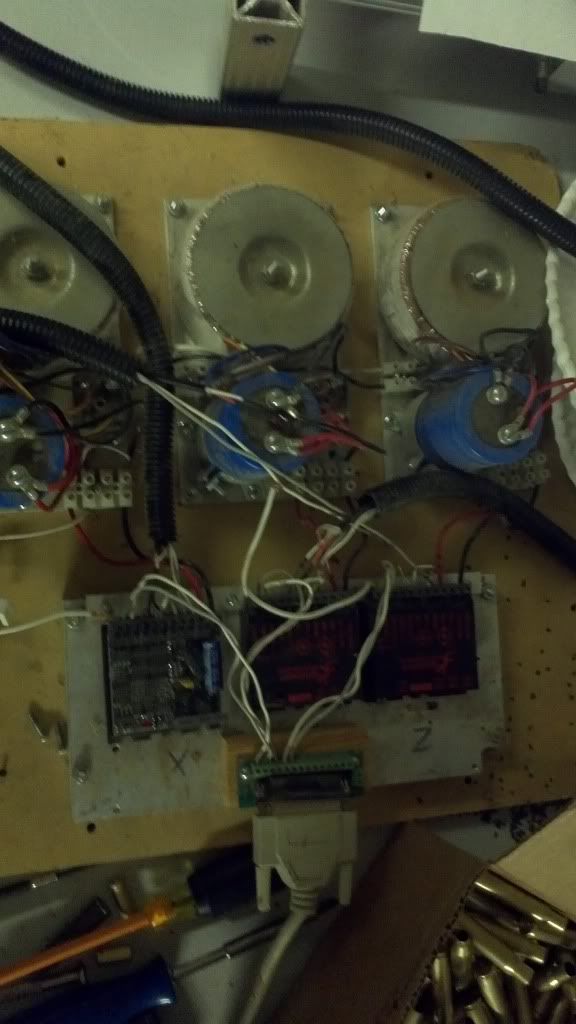
the 3 power supplies and the 3 controllers
image 7 and 8


motor and encoder
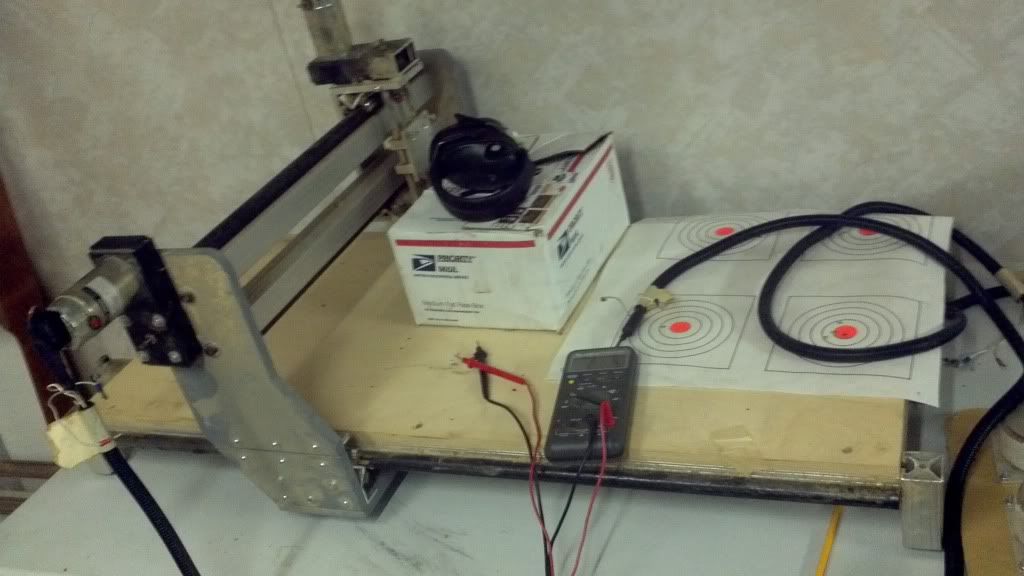
image 11 and 12 the table

Please Log in or Create an account to join the conversation.
- BigJohnT
-
- Offline
- Administrator
-
- Posts: 6999
- Thank you received: 1176
Turn on the power supply The FAULT indicator (red LED) should be on for 1 second and then turn off. IT NEVER TURNS ON The IN-POSITION indicator (green LED) I DONT HAVE A GREEN LED should turn on and remain on. The POWER indicator (green LED) should always be on. Turn the motor shaft VERY
slowly by hand. The IN-POSITION indicator (green LED) will turn off when you turn the motor more than two encoder counts. The Warn indicator (yellow LED) NO YELLOW LED EITHER will turn on when you have turned the motor more than 128 encoder counts. The FAULT indicator (red LED) will turn on when you turn the motor past the following error limit (see option switch section). After 1 second the FAULT light will turn off and the IN-POSITION LED will come back on.
If the red fault LED never comes on and the power LED is not on check the supply voltage to make sure it is correct voltage and polarity at the drive terminals. If the DC voltage is correct at the drive terminals then I suspect the drive is DOA. Time to contact Gecko if that is the case and they are very nice to deal with.
John
Please Log in or Create an account to join the conversation.