PID tuning once again
- terkaa
- Offline
- Elite Member
-

Less
More
- Posts: 261
- Thank you received: 3
14 Oct 2016 16:51 - 14 Oct 2016 17:00 #81648
by terkaa
PID tuning once again was created by terkaa
Hi,
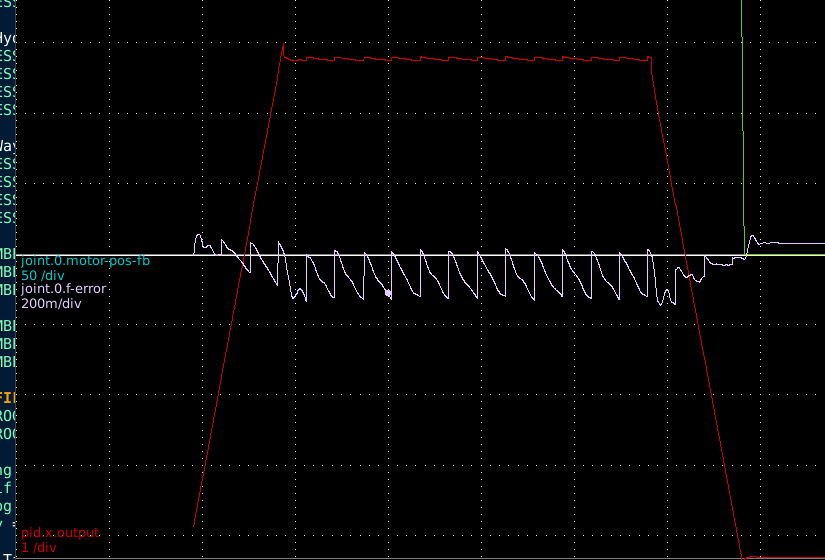
I have servo system with absolute linear scales. Control is analog +-10V. I did some servo tuning today. And I used halscope as an aid. After getting closer to my goal. I noticed that there was saw blade form in following error. Is this normal ? Is it possible to get rid of this ? I can get this following error centered by adjusting FF1. And I can get accel/decel decent with FF2. But no matter what I do it seems this saw blade on ferror remains. Also I noted that there is moaning noise(like train horn) always when moving this axis to +direction when moving to -direction this noise is not present. Video here:
Tero
I have servo system with absolute linear scales. Control is analog +-10V. I did some servo tuning today. And I used halscope as an aid. After getting closer to my goal. I noticed that there was saw blade form in following error. Is this normal ? Is it possible to get rid of this ? I can get this following error centered by adjusting FF1. And I can get accel/decel decent with FF2. But no matter what I do it seems this saw blade on ferror remains. Also I noted that there is moaning noise(like train horn) always when moving this axis to +direction when moving to -direction this noise is not present. Video here:
Tero
Last edit: 14 Oct 2016 17:00 by terkaa.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17954
- Thank you received: 5261
14 Oct 2016 20:28 #81652
by PCW
Replied by PCW on topic PID tuning once again
I would first try to isolate the problem to feedback or motor drive/analog signal related
If you set the P,I,D terms to 0 you will have nothing but feedforward terms (feedback is ignored)
In this case if FF1 is correct, motion should be approximately correct ( a very small P term say .01 will keep it from drifting too far)
if you still get the sawtooth, then its likely a motor drive issue (velocity loop gain too high in drive?)
or possible a analog signal issue
If you set the P,I,D terms to 0 you will have nothing but feedforward terms (feedback is ignored)
In this case if FF1 is correct, motion should be approximately correct ( a very small P term say .01 will keep it from drifting too far)
if you still get the sawtooth, then its likely a motor drive issue (velocity loop gain too high in drive?)
or possible a analog signal issue
Please Log in or Create an account to join the conversation.
- terkaa
- Offline
- Elite Member
-
Less
More
- Posts: 261
- Thank you received: 3
14 Oct 2016 20:52 - 14 Oct 2016 20:53 #81654
by terkaa
Replied by terkaa on topic PID tuning once again
I will try these ASAP.I have connected analog signal to 7i83 by shielded twisted pair wire shielding connected to 7i83 side only. I have similar connection on Y-axis and it does not have this sawing effect. Are mechanical issues possible? Ie. binding bearing ?
Tero
Tero
Last edit: 14 Oct 2016 20:53 by terkaa.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17954
- Thank you received: 5261
14 Oct 2016 21:27 #81655
by PCW
Replied by PCW on topic PID tuning once again
Yes, could be mechanical, motor drive tuning, LinuxCNC tuning
(you can eliminate LinuxCNC tuning or encoder issues as a suspect by zeroing PID as I mentioned before)
(you can eliminate LinuxCNC tuning or encoder issues as a suspect by zeroing PID as I mentioned before)
Please Log in or Create an account to join the conversation.
- terkaa
- Offline
- Elite Member
-
Less
More
- Posts: 261
- Thank you received: 3
16 Oct 2016 19:56 - 16 Oct 2016 20:05 #81698
by terkaa
Replied by terkaa on topic PID tuning once again
Ok,
Here is a pic of scope after I tried my best to tune:
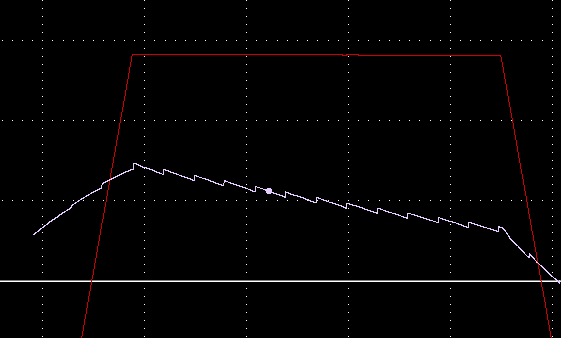
And here is a screenshot wityh P=0.01 I=0.0 D=0.0 AND FF1=0.055
Tero
Here is a pic of scope after I tried my best to tune:

And here is a screenshot wityh P=0.01 I=0.0 D=0.0 AND FF1=0.055

Tero
Last edit: 16 Oct 2016 20:05 by terkaa.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17954
- Thank you received: 5261
16 Oct 2016 20:06 - 16 Oct 2016 20:37 #81699
by PCW
Replied by PCW on topic PID tuning once again
As a guess, it looks like a drive tuning or mechanical issue (not LinuxCNC tuning)
Maybe really bad stiction?
Maybe really bad stiction?
Last edit: 16 Oct 2016 20:37 by PCW.
Please Log in or Create an account to join the conversation.
- terkaa
- Offline
- Elite Member
-
Less
More
- Posts: 261
- Thank you received: 3
16 Oct 2016 20:44 #81700
by terkaa
Replied by terkaa on topic PID tuning once again
Ok,
I will try to locate the problem tomorrow. Ball screw&nut combination has backlash of about 0.1mm. But that should only have an affect when changing direction. Since position feedback is with linear scale. But I will be wiser tomorrow(maybe)
Tero
I will try to locate the problem tomorrow. Ball screw&nut combination has backlash of about 0.1mm. But that should only have an affect when changing direction. Since position feedback is with linear scale. But I will be wiser tomorrow(maybe)
Tero
Please Log in or Create an account to join the conversation.
Time to create page: 0.084 seconds