rtapi -- uspace -- "Using POSIX non-realtime"
- jCandlish
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

- Posts: 77
- Thank you received: 4
I compiled the newest linux kernel configured as preemptable, but linuxcnc uspace disagrees.
latheoperator@125cnc:~$ uname -a
Linux 125cnc 4.8.9-jbc01 #1 SMP PREEMPT Sun Nov 20 09:34:59 CET 2016 x86_64 GNU/Linux
latheoperator@125cnc:~$ !lat
latency-test 1000000 1000000
Waiting for component 'threads' to become ready....Waited 3 seconds for master. giving up.
Note: Using POSIX non-realtime
Waiting for component 'lat' to become ready....
Note: Using POSIX non-realtime
latheoperator@125cnc:~$ ls -l /usr/bin/rtapi_app
-rwsr-xr-x 1 root root 102072 Nov 21 09:08 /usr/bin/rtapi_app
latheoperator@125cnc:~$ Also, I would like to work my way though the rtapi examples in the ./src/rtapi/examples directory, but am not quite understanding the ./src/rtapi/README file.
Starting from:
2. Load the RTOS and RTAPI modules:
Note: for this and most of the following steps you will need
to be root, or use 'su -c "<command>"'
scripts/load_rtapi
See a number of messages pop up in the kernel log as components
of the RTOS are installed...
One of the last ones will be:I can't find a load_rtapi script anywhere in the source distribution.
Are there pre-existing test-cases for the rtapi and uspace?
If so, how does one get started using them?
Thanks,
jCandlish
.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

- Posts: 19863
- Thank you received: 4636
I can't find a load_rtapi script anywhere in the source distribution
Yes, it appears that that README file contains a hangover from long ago. Looking back to v2.0 11 years ago it wasn't there then....
Are there pre-existing test-cases for the rtapi and uspace?
There are many tests that are run by the buildbot, and you can try those:
github.com/LinuxCNC/linuxcnc/blob/master/tests/README
Please Log in or Create an account to join the conversation.
- dgarrett
- Offline
- Platinum Member
-

- Posts: 492
- Thank you received: 297
I compiled the newest linux kernel configured as preemptable, but linuxcnc uspace disagrees.
Did you configure uspace properly?
$ cd the_root_dir/src
$ ./autogen.sh
$ ./configure --with-realtime=uspaceam not quite understanding the ./src/rtapi/README file.
That file seems to be out-of-date. It was last modified:
2cc3ad7 2014-08-30
Please Log in or Create an account to join the conversation.
- jCandlish
-
Topic Author
- Offline
- Senior Member
-
- Posts: 77
- Thank you received: 4
That is, I downloaded the package source and built local NMU debs.
This package is working with the current 'stretch' preempt kernel.
Linux 125cnc 4.8.0-1-rt-amd64 #1 SMP PREEMPT RT Debian 4.8.5-1 (2016-10-28) x86_64 GNU/LinuxMy 4.8.9 preempt kernel says:
Note: Using POSIX non-realtimeI would like to better understand the uspace rtapi wrapper. I'm only finding out of date documentation.
.
Please Log in or Create an account to join the conversation.
- jCandlish
-
Topic Author
- Offline
- Senior Member
-
- Posts: 77
- Thank you received: 4
There are many tests that are run by the buildbot, and you can try those:
I was thinking more specifically about the examples in ./src/rtapi/examples, and how they apply to the uspace wrapper.
Please Log in or Create an account to join the conversation.
- dgarrett
- Offline
- Platinum Member
-
- Posts: 492
- Thank you received: 297
I compliled linuxcnc via the 'apt-get source' method.
You must still use .configure with --realtime=uspace for a preempt-rt kernel
$ ./configure --help|grep realtime
--enable-simulator Deprecated! Use --with-realtime=uspace instead.
--with-realtime=PATH Path where RTAI is installed, or "uspace" for POSIXOnce configured for uspace realtime, you should see a correct report
(to stdout) for commands like
$ latency-test
Note: Using POSIX realtime
...Configuration is not correct if report is:
Note: Using POSIX non-realtimePlease Log in or Create an account to join the conversation.
- dgarrett
- Offline
- Platinum Member
-
- Posts: 492
- Thank you received: 297
your custom debian stretch kernel:
latheoperator@125cnc:~$ uname -a
Linux 125cnc 4.8.9-jbc01 #1 SMP PREEMPT Sun Nov 20 09:34:59 CET 2016 x86_64 GNU/does not comply with a test in src/rtapi/uspace_common.h
static int detect_realtime() {
struct utsname u;
int crit1, crit2 = 0;
FILE *fd;
uname(&u);
crit1 = strcasestr (u.version, "PREEMPT RT") != 0;
if ((fd = fopen("/sys/kernel/realtime","r")) != NULL) {
int flag;
crit2 = ((fscanf(fd, "%d", &flag) == 1) && (flag == 1));
fclose(fd);
}
return crit1 && crit2;
}Your kernel is reporting "SMP PREEMPT without the specific
substring expected, namely: "PREEMPT RT".
So it appears no preempt-rt patch has been applied to the kernel you are using.
On a system i use (jessie,uspace), the report is:
Linux t520 4.1.0-0.bpo.2-rt-amd64 #1 SMP PREEMPT RT Debian 4.1.6-1~bpo8+1 (2015-09-09) x86_64 GNU/Linuxref (2.7 tree):
git.linuxcnc.org/gitweb?p=linuxcnc.git;a...d8;hb=refs/heads/2.7
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-
- Posts: 17931
- Thank you received: 5255
AFAIK 4.8.6-rt5 is the latest as of Nov 21,2016
Please Log in or Create an account to join the conversation.
- jCandlish
-
Topic Author
- Offline
- Senior Member
-
- Posts: 77
- Thank you received: 4
Somehow I thought PREEMPT RT was in mainline. I checked, and no patch is yet available for 4.8.9
...
Anyway, the servo thread jitter I am seeing with a celereon skylake system is quite disappointing. >= 100μs.
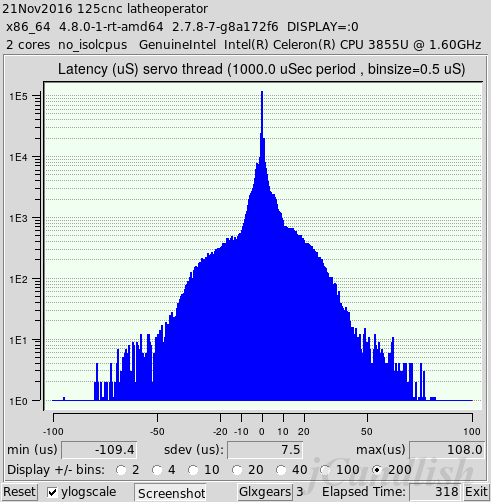
I question if it is sufficient?
This is with
GRUB_CMDLINE_LINUX="ipv6.disable=1 intel_idle.max_cstate=1 processor.max_cstate=1"
I've looked also to 'powertop' and 'i7z' for insight on this jitter, but no joy.
.
Please Log in or Create an account to join the conversation.
- thuwrx10
- Offline
- New Member
-

- Posts: 2
- Thank you received: 0
Please Log in or Create an account to join the conversation.