Help Create a shortcut for configuration
- PABLOSAN2903
- Offline
- New Member
-

Less
More
- Posts: 4
- Thank you received: 0
18 Jan 2017 20:57 - 18 Jan 2017 21:00 #86091
by PABLOSAN2903
Help Create a shortcut for configuration was created by PABLOSAN2903
Hi everybody how are you.
It is my first post that I do, I hope to be concrete, I use translator, I hope everything can be translated to mean me.
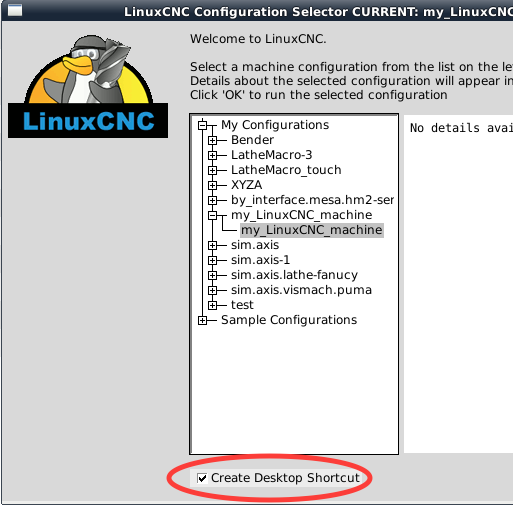
I am in retrofit of a brother TC211 everything and I check everything mechanic and electronic works very well, it adds kit mesa 5i25 and 7i77, I am based the page www.wiki.eusurplus.com/index.php?title=LinuxCNC_Run_In_Place when I arrive at the part of Create A shortcut for configuration I do not know what to do, I do not know much about computing, I get lost I go for a month and I have not advanced anything I'm a little sad that there is no information in this section if someone can help me I'll thank him with all my heart, First images are from wiki.eusurplus
It is my first post that I do, I hope to be concrete, I use translator, I hope everything can be translated to mean me.
I am in retrofit of a brother TC211 everything and I check everything mechanic and electronic works very well, it adds kit mesa 5i25 and 7i77, I am based the page www.wiki.eusurplus.com/index.php?title=LinuxCNC_Run_In_Place when I arrive at the part of Create A shortcut for configuration I do not know what to do, I do not know much about computing, I get lost I go for a month and I have not advanced anything I'm a little sad that there is no information in this section if someone can help me I'll thank him with all my heart, First images are from wiki.eusurplus
Last edit: 18 Jan 2017 21:00 by PABLOSAN2903.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19879
- Thank you received: 4643
19 Jan 2017 20:20 - 19 Jan 2017 20:20 #86189
by andypugh
Replied by andypugh on topic Help Create a shortcut for configuration
You might be installing LinuxCNC in a much more complicated way than necessary. You can get it in the same way as any other application, or as a LiveCD install.
But, now you have got this far, you might as well continue.
The easiest way to get a launcher is to follow the instructions in the earlier section:
Then in the dialog box that pops up, select the "make desktop shortcut" option and select your new configuration:
But, now you have got this far, you might as well continue.
The easiest way to get a launcher is to follow the instructions in the earlier section:
$ . ../scripts/rip-environment
$ linuxcncThen in the dialog box that pops up, select the "make desktop shortcut" option and select your new configuration:
Last edit: 19 Jan 2017 20:20 by andypugh.
Please Log in or Create an account to join the conversation.
- PABLOSAN2903
- Offline
- New Member
-
Less
More
- Posts: 4
- Thank you received: 0
22 Jan 2017 19:50 #86416
by PABLOSAN2903
Replied by PABLOSAN2903 on topic Help Create a shortcut for configuration
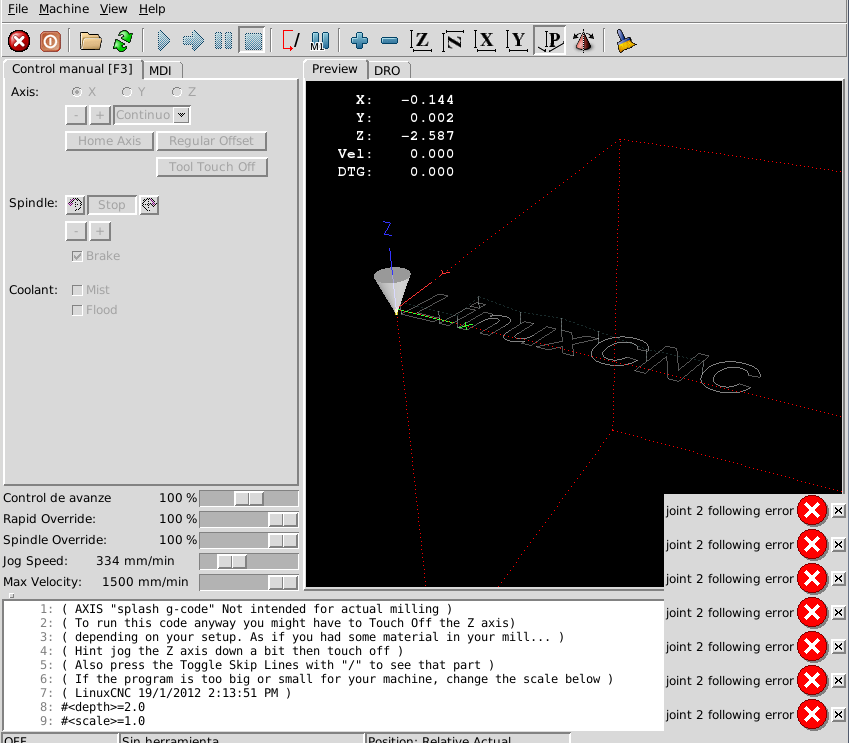
Thank you is done, now it is another problem, when I make my configs with pncconf I think everything is fine but when I turn on the machine it sends a signal, Z axis moves and it appears following error: joint 2 following error, in 0 (X) in 1 (Y ) And 2 (Z), comparing several HAL files. Of other people to me it comes out different (I hope to upload the images because I do not know how) well part of the axes (X) (Y) (Z) I have there are a couple different things I hope they can help. And thank you for your help, the different parts are as follows:
setp pid.x.error-previous-target true (This never appears when everything is going well)
net x-vel-cmd => pid.x.command-deriv (Here I changed in other HAL files. Cmd per fb example: net x-vel-fb => pid.x.feedback-deriv)
God will reward you.
# Generated by PNCconf at Sun Jan 22 13:23:09 2017
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt trivkins
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt hostmot2
loadrt hm2_pci config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=000xxx"
setp hm2_5i25.0.watchdog.timeout_ns 10000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_5i25.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_5i25.0.write servo-thread
# external output signals
# external input signals
#*******************
# AXIS X
#*******************
setp pid.x.Pgain [AXIS_0]P
setp pid.x.Igain [AXIS_0]I
setp pid.x.Dgain [AXIS_0]D
setp pid.x.bias [AXIS_0]BIAS
setp pid.x.FF0 [AXIS_0]FF0
setp pid.x.FF1 [AXIS_0]FF1
setp pid.x.FF2 [AXIS_0]FF2
setp pid.x.deadband [AXIS_0]DEADBAND
setp pid.x.maxoutput [AXIS_0]MAX_OUTPUT
setp pid.x.error-previous-target true
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-vel-cmd => pid.x.command-deriv
net x-pos-fb => pid.x.feedback
net x-output => pid.x.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout0-scalemax [AXIS_0]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout0-minlim [AXIS_0]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout0-maxlim [AXIS_0]OUTPUT_MAX_LIMIT
net x-output => hm2_5i25.0.7i77.0.1.analogout0
net x-pos-cmd axis.0.motor-pos-cmd
net x-enable axis.0.amp-enable-out
# enable _all_ sserial pwmgens
net x-enable hm2_5i25.0.7i77.0.1.analogena
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.00.counter-mode 0
setp hm2_5i25.0.encoder.00.filter 1
setp hm2_5i25.0.encoder.00.index-invert 0
setp hm2_5i25.0.encoder.00.index-mask 0
setp hm2_5i25.0.encoder.00.index-mask-invert 0
setp hm2_5i25.0.encoder.00.scale [AXIS_0]ENCODER_SCALE
net x-pos-fb <= hm2_5i25.0.encoder.00.position
net x-vel-fb <= hm2_5i25.0.encoder.00.velocity
net x-pos-fb => axis.0.motor-pos-fb
net x-index-enable axis.0.index-enable <=> hm2_5i25.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_5i25.0.encoder.00.rawcounts
# ---setup home / limit switch signals---
net x-home-sw => axis.0.home-sw-in
net x-neg-limit => axis.0.neg-lim-sw-in
net x-pos-limit => axis.0.pos-lim-sw-in
#*******************
# AXIS Y
#*******************
setp pid.y.Pgain [AXIS_1]P
setp pid.y.Igain [AXIS_1]I
setp pid.y.Dgain [AXIS_1]D
setp pid.y.bias [AXIS_1]BIAS
setp pid.y.FF0 [AXIS_1]FF0
setp pid.y.FF1 [AXIS_1]FF1
setp pid.y.FF2 [AXIS_1]FF2
setp pid.y.deadband [AXIS_1]DEADBAND
setp pid.y.maxoutput [AXIS_1]MAX_OUTPUT
setp pid.y.error-previous-target true
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-vel-cmd => pid.y.command-deriv
net y-pos-fb => pid.y.feedback
net y-output => pid.y.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout1-scalemax [AXIS_1]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout1-minlim [AXIS_1]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout1-maxlim [AXIS_1]OUTPUT_MAX_LIMIT
net y-output => hm2_5i25.0.7i77.0.1.analogout1
net y-pos-cmd axis.1.motor-pos-cmd
net y-enable axis.1.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.01.counter-mode 0
setp hm2_5i25.0.encoder.01.filter 1
setp hm2_5i25.0.encoder.01.index-invert 0
setp hm2_5i25.0.encoder.01.index-mask 0
setp hm2_5i25.0.encoder.01.index-mask-invert 0
setp hm2_5i25.0.encoder.01.scale [AXIS_1]ENCODER_SCALE
net y-pos-fb <= hm2_5i25.0.encoder.01.position
net y-vel-fb <= hm2_5i25.0.encoder.01.velocity
net y-pos-fb => axis.1.motor-pos-fb
net y-index-enable axis.1.index-enable <=> hm2_5i25.0.encoder.01.index-enable
net y-pos-rawcounts <= hm2_5i25.0.encoder.01.rawcounts
# ---setup home / limit switch signals---
net y-home-sw => axis.1.home-sw-in
net y-neg-limit => axis.1.neg-lim-sw-in
net y-pos-limit => axis.1.pos-lim-sw-in
#*******************
# AXIS Z
#*******************
setp pid.z.Pgain [AXIS_2]P
setp pid.z.Igain [AXIS_2]I
setp pid.z.Dgain [AXIS_2]D
setp pid.z.bias [AXIS_2]BIAS
setp pid.z.FF0 [AXIS_2]FF0
setp pid.z.FF1 [AXIS_2]FF1
setp pid.z.FF2 [AXIS_2]FF2
setp pid.z.deadband [AXIS_2]DEADBAND
setp pid.z.maxoutput [AXIS_2]MAX_OUTPUT
setp pid.z.error-previous-target true
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-vel-cmd => pid.z.command-deriv
net z-pos-fb => pid.z.feedback
net z-output => pid.z.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout2-scalemax [AXIS_2]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout2-minlim [AXIS_2]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout2-maxlim [AXIS_2]OUTPUT_MAX_LIMIT
net z-output => hm2_5i25.0.7i77.0.1.analogout2
net z-pos-cmd axis.2.motor-pos-cmd
net z-enable axis.2.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.02.counter-mode 0
setp hm2_5i25.0.encoder.02.filter 1
setp hm2_5i25.0.encoder.02.index-invert 0
setp hm2_5i25.0.encoder.02.index-mask 0
setp hm2_5i25.0.encoder.02.index-mask-invert 0
setp hm2_5i25.0.encoder.02.scale [AXIS_2]ENCODER_SCALE
net z-pos-fb <= hm2_5i25.0.encoder.02.position
net z-vel-fb <= hm2_5i25.0.encoder.02.velocity
net z-pos-fb => axis.2.motor-pos-fb
net z-index-enable axis.2.index-enable <=> hm2_5i25.0.encoder.02.index-enable
net z-pos-rawcounts <= hm2_5i25.0.encoder.02.rawcounts
# ---setup home / limit switch signals---
net z-home-sw => axis.2.home-sw-in
net z-neg-limit => axis.2.neg-lim-sw-in
net z-pos-limit => axis.2.pos-lim-sw-in
#*******************
# SPINDLE S
#*******************
setp pid.s.Pgain [SPINDLE_9]P
setp pid.s.Igain [SPINDLE_9]I
setp pid.s.Dgain [SPINDLE_9]D
setp pid.s.bias [SPINDLE_9]BIAS
setp pid.s.FF0 [SPINDLE_9]FF0
setp pid.s.FF1 [SPINDLE_9]FF1
setp pid.s.FF2 [SPINDLE_9]FF2
setp pid.s.deadband [SPINDLE_9]DEADBAND
setp pid.s.maxoutput [SPINDLE_9]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm => pid.s.command
net spindle-vel-fb-rpm => pid.s.feedback
net spindle-output <= pid.s.output
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= motion.spindle-speed-out-rps
net spindle-vel-cmd-rps-abs <= motion.spindle-speed-out-rps-abs
net spindle-vel-cmd-rpm <= motion.spindle-speed-out
net spindle-vel-cmd-rpm-abs <= motion.spindle-speed-out-abs
net spindle-enable <= motion.spindle-on
net spindle-cw <= motion.spindle-forward
net spindle-ccw <= motion.spindle-reverse
net spindle-brake <= motion.spindle-brake
net spindle-revs => motion.spindle-revs
net spindle-at-speed => motion.spindle-at-speed
net spindle-vel-fb-rps => motion.spindle-speed-in
net spindle-index-enable <=> motion.spindle-index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net joint-select-a halui.joint.0.select
net x-is-homed halui.joint.0.is-homed
net jog-x-pos halui.jog.0.plus
net jog-x-neg halui.jog.0.minus
net jog-x-analog halui.jog.0.analog
net joint-select-b halui.joint.1.select
net y-is-homed halui.joint.1.is-homed
net jog-y-pos halui.jog.1.plus
net jog-y-neg halui.jog.1.minus
net jog-y-analog halui.jog.1.analog
net joint-select-c halui.joint.2.select
net z-is-homed halui.joint.2.is-homed
net jog-z-pos halui.jog.2.plus
net jog-z-neg halui.jog.2.minus
net jog-z-analog halui.jog.2.analog
net jog-selected-pos halui.jog.selected.plus
net jog-selected-neg halui.jog.selected.minus
net spindle-manual-cw halui.spindle.forward
net spindle-manual-ccw halui.spindle.reverse
net spindle-manual-stop halui.spindle.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---toolchange signals for custom tool changer---
net tool-number <= iocontrol.0.tool-prep-number
net tool-change-request <= iocontrol.0.tool-change
net tool-change-confirmed => iocontrol.0.tool-changed
net tool-prepare-request <= iocontrol.0.tool-prepare
net tool-prepare-confirmed => iocontrol.0.tool-prepared
setp pid.x.error-previous-target true (This never appears when everything is going well)
net x-vel-cmd => pid.x.command-deriv (Here I changed in other HAL files. Cmd per fb example: net x-vel-fb => pid.x.feedback-deriv)
God will reward you.
# Generated by PNCconf at Sun Jan 22 13:23:09 2017
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt trivkins
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt hostmot2
loadrt hm2_pci config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=000xxx"
setp hm2_5i25.0.watchdog.timeout_ns 10000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_5i25.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_5i25.0.write servo-thread
# external output signals
# external input signals
#*******************
# AXIS X
#*******************
setp pid.x.Pgain [AXIS_0]P
setp pid.x.Igain [AXIS_0]I
setp pid.x.Dgain [AXIS_0]D
setp pid.x.bias [AXIS_0]BIAS
setp pid.x.FF0 [AXIS_0]FF0
setp pid.x.FF1 [AXIS_0]FF1
setp pid.x.FF2 [AXIS_0]FF2
setp pid.x.deadband [AXIS_0]DEADBAND
setp pid.x.maxoutput [AXIS_0]MAX_OUTPUT
setp pid.x.error-previous-target true
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-vel-cmd => pid.x.command-deriv
net x-pos-fb => pid.x.feedback
net x-output => pid.x.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout0-scalemax [AXIS_0]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout0-minlim [AXIS_0]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout0-maxlim [AXIS_0]OUTPUT_MAX_LIMIT
net x-output => hm2_5i25.0.7i77.0.1.analogout0
net x-pos-cmd axis.0.motor-pos-cmd
net x-enable axis.0.amp-enable-out
# enable _all_ sserial pwmgens
net x-enable hm2_5i25.0.7i77.0.1.analogena
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.00.counter-mode 0
setp hm2_5i25.0.encoder.00.filter 1
setp hm2_5i25.0.encoder.00.index-invert 0
setp hm2_5i25.0.encoder.00.index-mask 0
setp hm2_5i25.0.encoder.00.index-mask-invert 0
setp hm2_5i25.0.encoder.00.scale [AXIS_0]ENCODER_SCALE
net x-pos-fb <= hm2_5i25.0.encoder.00.position
net x-vel-fb <= hm2_5i25.0.encoder.00.velocity
net x-pos-fb => axis.0.motor-pos-fb
net x-index-enable axis.0.index-enable <=> hm2_5i25.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_5i25.0.encoder.00.rawcounts
# ---setup home / limit switch signals---
net x-home-sw => axis.0.home-sw-in
net x-neg-limit => axis.0.neg-lim-sw-in
net x-pos-limit => axis.0.pos-lim-sw-in
#*******************
# AXIS Y
#*******************
setp pid.y.Pgain [AXIS_1]P
setp pid.y.Igain [AXIS_1]I
setp pid.y.Dgain [AXIS_1]D
setp pid.y.bias [AXIS_1]BIAS
setp pid.y.FF0 [AXIS_1]FF0
setp pid.y.FF1 [AXIS_1]FF1
setp pid.y.FF2 [AXIS_1]FF2
setp pid.y.deadband [AXIS_1]DEADBAND
setp pid.y.maxoutput [AXIS_1]MAX_OUTPUT
setp pid.y.error-previous-target true
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-vel-cmd => pid.y.command-deriv
net y-pos-fb => pid.y.feedback
net y-output => pid.y.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout1-scalemax [AXIS_1]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout1-minlim [AXIS_1]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout1-maxlim [AXIS_1]OUTPUT_MAX_LIMIT
net y-output => hm2_5i25.0.7i77.0.1.analogout1
net y-pos-cmd axis.1.motor-pos-cmd
net y-enable axis.1.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.01.counter-mode 0
setp hm2_5i25.0.encoder.01.filter 1
setp hm2_5i25.0.encoder.01.index-invert 0
setp hm2_5i25.0.encoder.01.index-mask 0
setp hm2_5i25.0.encoder.01.index-mask-invert 0
setp hm2_5i25.0.encoder.01.scale [AXIS_1]ENCODER_SCALE
net y-pos-fb <= hm2_5i25.0.encoder.01.position
net y-vel-fb <= hm2_5i25.0.encoder.01.velocity
net y-pos-fb => axis.1.motor-pos-fb
net y-index-enable axis.1.index-enable <=> hm2_5i25.0.encoder.01.index-enable
net y-pos-rawcounts <= hm2_5i25.0.encoder.01.rawcounts
# ---setup home / limit switch signals---
net y-home-sw => axis.1.home-sw-in
net y-neg-limit => axis.1.neg-lim-sw-in
net y-pos-limit => axis.1.pos-lim-sw-in
#*******************
# AXIS Z
#*******************
setp pid.z.Pgain [AXIS_2]P
setp pid.z.Igain [AXIS_2]I
setp pid.z.Dgain [AXIS_2]D
setp pid.z.bias [AXIS_2]BIAS
setp pid.z.FF0 [AXIS_2]FF0
setp pid.z.FF1 [AXIS_2]FF1
setp pid.z.FF2 [AXIS_2]FF2
setp pid.z.deadband [AXIS_2]DEADBAND
setp pid.z.maxoutput [AXIS_2]MAX_OUTPUT
setp pid.z.error-previous-target true
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-vel-cmd => pid.z.command-deriv
net z-pos-fb => pid.z.feedback
net z-output => pid.z.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout2-scalemax [AXIS_2]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout2-minlim [AXIS_2]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout2-maxlim [AXIS_2]OUTPUT_MAX_LIMIT
net z-output => hm2_5i25.0.7i77.0.1.analogout2
net z-pos-cmd axis.2.motor-pos-cmd
net z-enable axis.2.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.02.counter-mode 0
setp hm2_5i25.0.encoder.02.filter 1
setp hm2_5i25.0.encoder.02.index-invert 0
setp hm2_5i25.0.encoder.02.index-mask 0
setp hm2_5i25.0.encoder.02.index-mask-invert 0
setp hm2_5i25.0.encoder.02.scale [AXIS_2]ENCODER_SCALE
net z-pos-fb <= hm2_5i25.0.encoder.02.position
net z-vel-fb <= hm2_5i25.0.encoder.02.velocity
net z-pos-fb => axis.2.motor-pos-fb
net z-index-enable axis.2.index-enable <=> hm2_5i25.0.encoder.02.index-enable
net z-pos-rawcounts <= hm2_5i25.0.encoder.02.rawcounts
# ---setup home / limit switch signals---
net z-home-sw => axis.2.home-sw-in
net z-neg-limit => axis.2.neg-lim-sw-in
net z-pos-limit => axis.2.pos-lim-sw-in
#*******************
# SPINDLE S
#*******************
setp pid.s.Pgain [SPINDLE_9]P
setp pid.s.Igain [SPINDLE_9]I
setp pid.s.Dgain [SPINDLE_9]D
setp pid.s.bias [SPINDLE_9]BIAS
setp pid.s.FF0 [SPINDLE_9]FF0
setp pid.s.FF1 [SPINDLE_9]FF1
setp pid.s.FF2 [SPINDLE_9]FF2
setp pid.s.deadband [SPINDLE_9]DEADBAND
setp pid.s.maxoutput [SPINDLE_9]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm => pid.s.command
net spindle-vel-fb-rpm => pid.s.feedback
net spindle-output <= pid.s.output
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= motion.spindle-speed-out-rps
net spindle-vel-cmd-rps-abs <= motion.spindle-speed-out-rps-abs
net spindle-vel-cmd-rpm <= motion.spindle-speed-out
net spindle-vel-cmd-rpm-abs <= motion.spindle-speed-out-abs
net spindle-enable <= motion.spindle-on
net spindle-cw <= motion.spindle-forward
net spindle-ccw <= motion.spindle-reverse
net spindle-brake <= motion.spindle-brake
net spindle-revs => motion.spindle-revs
net spindle-at-speed => motion.spindle-at-speed
net spindle-vel-fb-rps => motion.spindle-speed-in
net spindle-index-enable <=> motion.spindle-index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net joint-select-a halui.joint.0.select
net x-is-homed halui.joint.0.is-homed
net jog-x-pos halui.jog.0.plus
net jog-x-neg halui.jog.0.minus
net jog-x-analog halui.jog.0.analog
net joint-select-b halui.joint.1.select
net y-is-homed halui.joint.1.is-homed
net jog-y-pos halui.jog.1.plus
net jog-y-neg halui.jog.1.minus
net jog-y-analog halui.jog.1.analog
net joint-select-c halui.joint.2.select
net z-is-homed halui.joint.2.is-homed
net jog-z-pos halui.jog.2.plus
net jog-z-neg halui.jog.2.minus
net jog-z-analog halui.jog.2.analog
net jog-selected-pos halui.jog.selected.plus
net jog-selected-neg halui.jog.selected.minus
net spindle-manual-cw halui.spindle.forward
net spindle-manual-ccw halui.spindle.reverse
net spindle-manual-stop halui.spindle.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---toolchange signals for custom tool changer---
net tool-number <= iocontrol.0.tool-prep-number
net tool-change-request <= iocontrol.0.tool-change
net tool-change-confirmed => iocontrol.0.tool-changed
net tool-prepare-request <= iocontrol.0.tool-prepare
net tool-prepare-confirmed => iocontrol.0.tool-prepared
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 4761
- Thank you received: 1463
22 Jan 2017 20:15 - 22 Jan 2017 20:18 #86420
by Todd Zuercher
Replied by Todd Zuercher on topic Help Create a shortcut for configuration
Having a joint following error, is expected behavior until after you have the PID tuned for each axis.
Here is a link to a good tuning tutorial.
gnipsel.com/linuxcnc/tuning/servo.html
A couple of possible reasons for an immediate following error when turning on would be having the encoder direction or output scale backwards.
Here is a link to a good tuning tutorial.
gnipsel.com/linuxcnc/tuning/servo.html
A couple of possible reasons for an immediate following error when turning on would be having the encoder direction or output scale backwards.
Last edit: 22 Jan 2017 20:18 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4643
23 Jan 2017 00:10 #86448
by andypugh
Replied by andypugh on topic Help Create a shortcut for configuration
It is very likely that the problem is that the Z-axis motor and the Z-axis encoder disagree about which direction is positive.
Try making the Z-axis encoder scale the same number but negative.
If that works, and the axis moves in the right direction, then you are good to go. If it moves the wrong way, put the encoder scale back, and change the pwm / analogout scale to reverse the motor instead.
Try making the Z-axis encoder scale the same number but negative.
If that works, and the axis moves in the right direction, then you are good to go. If it moves the wrong way, put the encoder scale back, and change the pwm / analogout scale to reverse the motor instead.
Please Log in or Create an account to join the conversation.
Time to create page: 0.229 seconds