How To add robot arm model into linuxCNC
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
18 May 2018 09:26 #110836
by andypugh
Replied by andypugh on topic How To add robot arm model into linuxCNC
We can't see the pictures.
Please Log in or Create an account to join the conversation.
- Wireline
-

- Offline
- Senior Member
-

Less
More
- Posts: 67
- Thank you received: 9
18 May 2018 16:51 #110844
by Wireline
Replied by Wireline on topic How To add robot arm model into linuxCNC
Yeap looks like a multiple attachment problem, I had that before ") Seems better to attach one per reply
Seems better to attach one per reply
Seems better to attach one per reply Please Log in or Create an account to join the conversation.
- AnjaBird.AKB
- Offline
- New Member
-

Less
More
- Posts: 13
- Thank you received: 1
18 May 2018 16:58 - 18 May 2018 17:07 #110845
by AnjaBird.AKB
 pic
pic
Replied by AnjaBird.AKB on topic How To add robot arm model into linuxCNC
Last edit: 18 May 2018 17:07 by andypugh.
The following user(s) said Thank You: Y837
Please Log in or Create an account to join the conversation.
- Wireline
-
- Offline
- Senior Member
-
Less
More
- Posts: 67
- Thank you received: 9
18 May 2018 17:10 #110846
by Wireline
Replied by Wireline on topic How To add robot arm model into linuxCNC
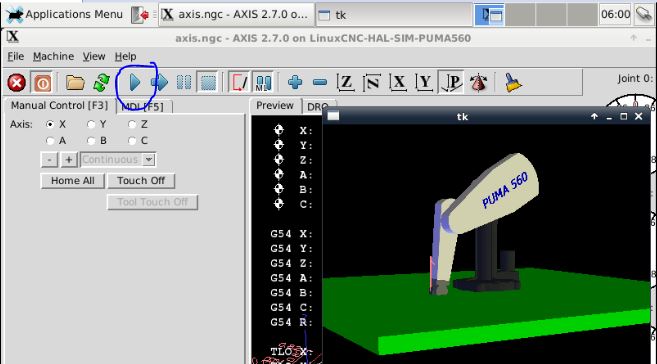
That button runs the gcode in the gcode preview window which is the linuxcnc logo by default. It is positioned badly for the puma and so it collides with itself. Try the pumaweld or might be called seamweld ngc file. Its in sim / axis / vismach / puma
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4642
18 May 2018 17:11 #110847
by andypugh
Replied by andypugh on topic How To add robot arm model into linuxCNC
You probably need to "touch off" the tool position.
You almost never operate a CNC machine in the machine coordinate system, you always run in work coordinate system.
Typically this is with Z = 0 on the top of the material.
Often you will lower the tool until it actually touches the material to set the Z=0 height, and that is why it is called "touching off"
So, jog the arm so that Z is above the surface and then touch-off the Z height to zero and try running the G-code again.
You almost never operate a CNC machine in the machine coordinate system, you always run in work coordinate system.
Typically this is with Z = 0 on the top of the material.
Often you will lower the tool until it actually touches the material to set the Z=0 height, and that is why it is called "touching off"
So, jog the arm so that Z is above the surface and then touch-off the Z height to zero and try running the G-code again.
The following user(s) said Thank You: Wireline, MRx
Please Log in or Create an account to join the conversation.
- AnjaBird.AKB
- Offline
- New Member
-
Less
More
- Posts: 13
- Thank you received: 1
14 Jan 2019 06:22 #124138
by AnjaBird.AKB
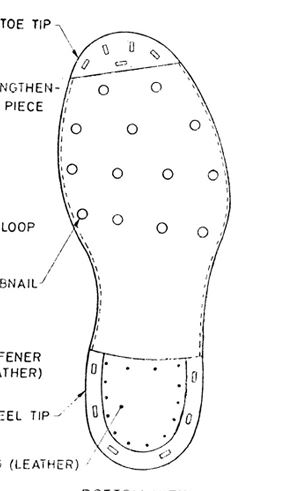
Plz any one can do a puma 560 simulation for this attached shoe bottom shape.i only need go through the margin of this bottom. it is very helpful for my work.if any one can plz send me a short video for mentioned description.
thank you.
This email address is being protected from spambots. You need JavaScript enabled to view it.
Replied by AnjaBird.AKB on topic How To add robot arm model into linuxCNC
Plz any one can do a puma 560 simulation for this attached shoe bottom shape.i only need go through the margin of this bottom. it is very helpful for my work.if any one can plz send me a short video for mentioned description.
thank you.
This email address is being protected from spambots. You need JavaScript enabled to view it.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4642
14 Jan 2019 14:04 #124154
by andypugh
Replied by andypugh on topic How To add robot arm model into linuxCNC
Are you asking someone to convert that bitmap image into G-code and then make a video of the Puma560 Vismach model tracing out the shape?
Please Log in or Create an account to join the conversation.
- AnjaBird.AKB
- Offline
- New Member
-
Less
More
- Posts: 13
- Thank you received: 1
15 Jan 2019 02:18 #124216
by AnjaBird.AKB
Replied by AnjaBird.AKB on topic How To add robot arm model into linuxCNC
exactly andypugh.could you please make a video and send it to my email ???
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4642
15 Jan 2019 16:49 #124245
by andypugh
No. Sorry, but it isn't interesting. And I do all this for fun.
Replied by andypugh on topic How To add robot arm model into linuxCNC
exactly andypugh.could you please make a video and send it to my email ???
No. Sorry, but it isn't interesting. And I do all this for fun.
Please Log in or Create an account to join the conversation.
- AnjaBird.AKB
- Offline
- New Member
-
Less
More
- Posts: 13
- Thank you received: 1
17 Jan 2019 06:25 #124328
by AnjaBird.AKB
Replied by AnjaBird.AKB on topic How To add robot arm model into linuxCNC
plz help me... it is really need for my project about robot arms 
Please Log in or Create an account to join the conversation.
Time to create page: 0.230 seconds