Step-Servo Motors - Why
- ayedurand
- Offline
- New Member
-

Less
More
- Posts: 5
- Thank you received: 0
01 Mar 2019 17:35 #127444
by ayedurand
Step-Servo Motors - Why was created by ayedurand
Background: I have a MaxNC lathe with Powermax II (P22NRXG-LNN-NS-00) steppers. I'm lead to believe that they're step-servos (I'm beginning to question this). This is a new one on me. I've done a bunch of reading here and discovered that LinuxCNC supports this type of motor. I'm hoping to use the parallel port on my PC to drive the lathe to keep costs down and because it has a driver setup (ridiculously simple) for the steppers.
What I don't understand is, why?
Why did the original designer include this feature in such a small machine? I don't really believe that it'll handle steel and big cuts of other materials would stall the stepper anyway. Power consumption is minimal as the steppers are rated at 18W with big current limiting resistors in the controller. There aren't any home switches and the encoders are only going to be incremental. Is there that much of an advantage to speed control with encoder feedback to warrant such a design choice? I'd think this setup would, perhaps did, put them out of business. I feel like I'm missing something.
Aside: looking for step-servo documentation has lead me to the concept of PID with seperate encoders which looks interesting.
What I don't understand is, why?
Why did the original designer include this feature in such a small machine? I don't really believe that it'll handle steel and big cuts of other materials would stall the stepper anyway. Power consumption is minimal as the steppers are rated at 18W with big current limiting resistors in the controller. There aren't any home switches and the encoders are only going to be incremental. Is there that much of an advantage to speed control with encoder feedback to warrant such a design choice? I'd think this setup would, perhaps did, put them out of business. I feel like I'm missing something.
Aside: looking for step-servo documentation has lead me to the concept of PID with seperate encoders which looks interesting.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17994
- Thank you received: 5281
01 Mar 2019 18:00 #127448
by PCW
Replied by PCW on topic Step-Servo Motors - Why
The motor itself is just a standard step motor, are you saying
that there are encoders in your system?
that there are encoders in your system?
Please Log in or Create an account to join the conversation.
- ayedurand
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 0
01 Mar 2019 20:49 #127458
by ayedurand
Replied by ayedurand on topic Step-Servo Motors - Why
I feel a bit foolish but I think you're right. I was thrown by another post that mentioned encoders and the fact that there are 8 pins on the motor connector.
Philosophically, though, why do steppers with co-located exist? How/why would you use them?
Philosophically, though, why do steppers with co-located exist? How/why would you use them?
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 4764
- Thank you received: 1464
01 Mar 2019 21:13 #127461
by Todd Zuercher
Replied by Todd Zuercher on topic Step-Servo Motors - Why
8 leads is a very normal wiring arrangement for an ordinary stepper motor and gives the most flexibility for adaptation to needs. It can be used for any of the normal stepper wiring options, as a 6-lead motor for an old uni-polar drive, or as a 4-lead for a more modern bipolar drive, with the options of connecting the coil pairs single, parallel or serial.
Please Log in or Create an account to join the conversation.
- pl7i92
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1872
- Thank you received: 358
02 Mar 2019 13:53 #127499
by pl7i92
Replied by pl7i92 on topic Step-Servo Motors - Why
it simply depends on your need if you want to go that way
a Good Standard Setup on a "leadshine D556" will get you in the same Precision,Speed and torque as the Hybrid
with less then 1/3 the Cost and on Lower Hardware Electronic and Power consumption
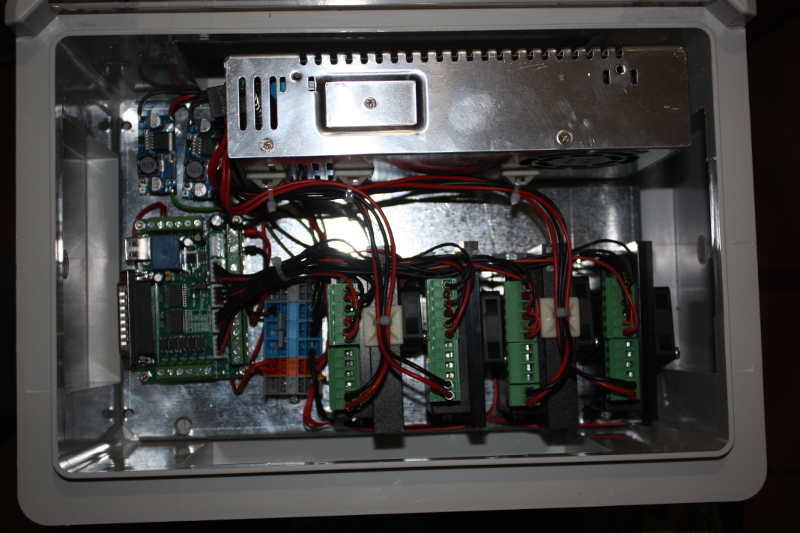
Standard 36V 15A
2x lm2596 for 12/5V
You can go way bigger with the same result
a Good Standard Setup on a "leadshine D556" will get you in the same Precision,Speed and torque as the Hybrid
with less then 1/3 the Cost and on Lower Hardware Electronic and Power consumption
Standard 36V 15A
2x lm2596 for 12/5V
You can go way bigger with the same result
Please Log in or Create an account to join the conversation.
- Richard J Kinch
-

- Offline
- Senior Member
-

Less
More
- Posts: 61
- Thank you received: 4
06 Mar 2019 21:24 #127911
by Richard J Kinch
Perhaps their engineering philosophy and economy was to develop just one universal design for motors and controls that could serve machines of any size. Or it was a design they already had perfected on larger machines, and it was more efficient to reuse it on smaller machines, compared to the costs and delays involved in developing a new, smaller design. Or they happened to have an inventory of the components.
All kinds of decent reasons for things getting "accidentally" over-engineered.
Replied by Richard J Kinch on topic Step-Servo Motors - Why
Why did the original designer include this feature in such a small machine?
Perhaps their engineering philosophy and economy was to develop just one universal design for motors and controls that could serve machines of any size. Or it was a design they already had perfected on larger machines, and it was more efficient to reuse it on smaller machines, compared to the costs and delays involved in developing a new, smaller design. Or they happened to have an inventory of the components.
All kinds of decent reasons for things getting "accidentally" over-engineered.
Please Log in or Create an account to join the conversation.
Time to create page: 0.089 seconds