Robot Arm not move in World mode
- M.O.
- Offline
- New Member
-

Less
More
- Posts: 11
- Thank you received: 0
15 May 2019 07:00 #133823
by M.O.
Robot Arm not move in World mode was created by M.O.
Hello
i built a robot arm with three axes. See Picture.
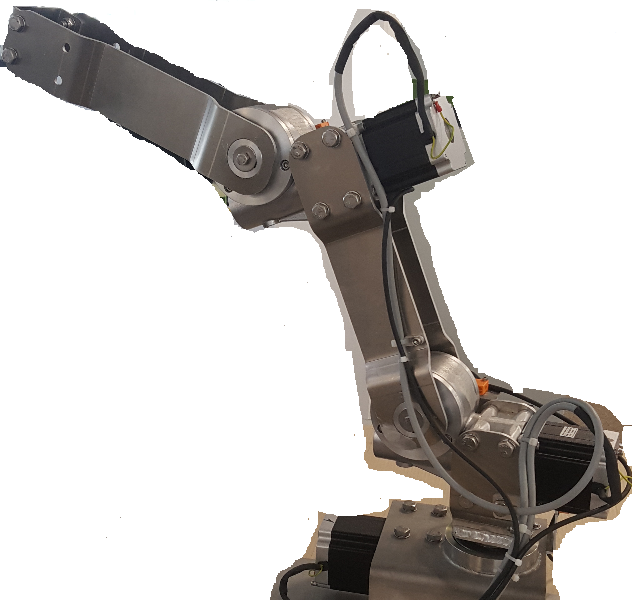
I control it with the Mesacards 6i25+7i76. I tried the vismach config with genserkins. All three axes alone drive very well but if i try the world mode nothing happens. I homed the axes but nothing happens.
If i try the command "dmesg" in a terminal the following error is be shown. What this means?

I Need help because i tried so much but nothing help
I send also my INI and my HAL
i built a robot arm with three axes. See Picture.
I control it with the Mesacards 6i25+7i76. I tried the vismach config with genserkins. All three axes alone drive very well but if i try the world mode nothing happens. I homed the axes but nothing happens.
If i try the command "dmesg" in a terminal the following error is be shown. What this means?
I Need help because i tried so much but nothing help
I send also my INI and my HAL
Please Log in or Create an account to join the conversation.
- pl7i92
-

- Offline
- Platinum Member
-

Less
More
- Posts: 1872
- Thank you received: 358
15 May 2019 11:13 - 15 May 2019 11:19 #133826
by pl7i92
Replied by pl7i92 on topic Robot Arm not move in World mode
this is ABC not XYZ
use the puma560 and it will work in world mode
THE error complaqins on Joints
the HAL includes AXIS there is a MISSMTch on Version of Kins
Please tell us what verison and operation system you using Wheezy Ubuntu debian
2.7.x or 2.8.x
this Combination of files is not working
use the puma560 and it will work in world mode
THE error complaqins on Joints
the HAL includes AXIS there is a MISSMTch on Version of Kins
Please tell us what verison and operation system you using Wheezy Ubuntu debian
2.7.x or 2.8.x
this Combination of files is not working
Last edit: 15 May 2019 11:19 by pl7i92.
Please Log in or Create an account to join the conversation.
- M.O.
- Offline
- New Member
-
Less
More
- Posts: 11
- Thank you received: 0
15 May 2019 11:28 - 15 May 2019 12:18 #133829
by M.O.
Replied by M.O. on topic Robot Arm not move in World mode
I use Debian GNU/Linux 7.11(wheezy)
Linux CNC Version 2.7.11
I use the Puma 560 but it don´t work
What du you mean with"This combination of files is not working"?
The INI and the HAL under this post is the example config of PUMA560 which i find on my PC. But i think there are mistakes in it
Linux CNC Version 2.7.11
I use the Puma 560 but it don´t work
What du you mean with"This combination of files is not working"?
The INI and the HAL under this post is the example config of PUMA560 which i find on my PC. But i think there are mistakes in it
Last edit: 15 May 2019 12:18 by M.O..
Please Log in or Create an account to join the conversation.
- M.O.
- Offline
- New Member
-
Less
More
- Posts: 11
- Thank you received: 0
16 May 2019 13:27 #133968
by M.O.
Replied by M.O. on topic Robot Arm not move in World mode
i tried it now with JOINTS but if i want open the GUI it shows the Error: Joint.0.motor-pos-cmd not exist. But i don´t understand why.
is there a mistake in my INI or my HAl?
is there a mistake in my INI or my HAl?
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17994
- Thank you received: 5281
16 May 2019 13:58 #133972
by PCW
Replied by PCW on topic Robot Arm not move in World mode
1. You would need LinuxCNC 2.8 to have joint.0.motor-pos-cmd
2. If that "Error: Joint.0.motor-pos-cmd" is the actual error, you have Joint capitalized
which would not work
2. If that "Error: Joint.0.motor-pos-cmd" is the actual error, you have Joint capitalized
which would not work
Please Log in or Create an account to join the conversation.
- M.O.
- Offline
- New Member
-
Less
More
- Posts: 11
- Thank you received: 0
16 May 2019 14:06 #133974
by M.O.
Replied by M.O. on topic Robot Arm not move in World mode
Is there a possibility to Control the Robot arm with Linux cnc 2.7.14.?
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17994
- Thank you received: 5281
16 May 2019 14:22 #133978
by PCW
Replied by PCW on topic Robot Arm not move in World mode
Yes, but note that many of motions signal names have changed between 2.7 and 2.8
and joint.0.motor-pos-cmd is a LinuxCNC 2.8 pin name.
I do suspect that LinuxCNC 2.8 would be a better choice for robotics since it makes a clear distinction between joints and axis
and joint.0.motor-pos-cmd is a LinuxCNC 2.8 pin name.
I do suspect that LinuxCNC 2.8 would be a better choice for robotics since it makes a clear distinction between joints and axis
Please Log in or Create an account to join the conversation.
- M.O.
- Offline
- New Member
-
Less
More
- Posts: 11
- Thank you received: 0
21 May 2019 08:02 #134453
by M.O.
Replied by M.O. on topic Robot Arm not move in World mode
I read a lot about Linux cnc 2.8 and it is not a official Edition of Linux cnc.
I would like to try it with 2.7.14 but i have still no idea why my world mode not run.
Any ideas please?
I would like to try it with 2.7.14 but i have still no idea why my world mode not run.
Any ideas please?
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
21 May 2019 13:42 #134477
by Todd Zuercher
Replied by Todd Zuercher on topic Robot Arm not move in World mode
Even though 2.8 is still under development, it is still a very usable program. I think it may be very close to being released. I would be surprised if it is not released before the end of the year. (However I am not one of the developers,)
Please Log in or Create an account to join the conversation.
- M.O.
- Offline
- New Member
-
Less
More
- Posts: 11
- Thank you received: 0
22 May 2019 13:57 #134579
by M.O.
Replied by M.O. on topic Robot Arm not move in World mode
i have updated to 2.8
after Homing my Axes it shows an error "KinematicsInverse failed".
I think my D-H Parameters are wrong or?
after Homing my Axes it shows an error "KinematicsInverse failed".
I think my D-H Parameters are wrong or?
Please Log in or Create an account to join the conversation.
Time to create page: 0.278 seconds