PUMA geometry
- felixcnc
-
 Topic Author
Topic Author
- Offline
- Junior Member
-

Less
More
- Posts: 29
- Thank you received: 0
21 Jul 2019 22:13 #140116
by felixcnc
PUMA geometry was created by felixcnc
Hello there,
I've been reading and struggling with this for quite a few time now, and there are a few things I can't get, if you don't want to read this all, I have added 3 questions at the end.
In my previous question here there was some discrepancy because I see a 6 degrees robot, but someone told me that PUMA should be 5 degrees robot, but I still see 6 joints and after some research in the code and HAL and puma configurations I couldn't find where the geometry is defined (except for a few parameters).
=================================================================
I will explain what I did , and how I did it.
PUMAKINS
To learn more about the geometry I have add some debug information inside pumakins.c so I can dump information about the joints and the EmcPose... I created a very simple function:
And added that at the end of the kinematicsForward method so I can see what is going on, and after some depuration of the output I got this xls file with the joints and world positions:
Spreadsheet
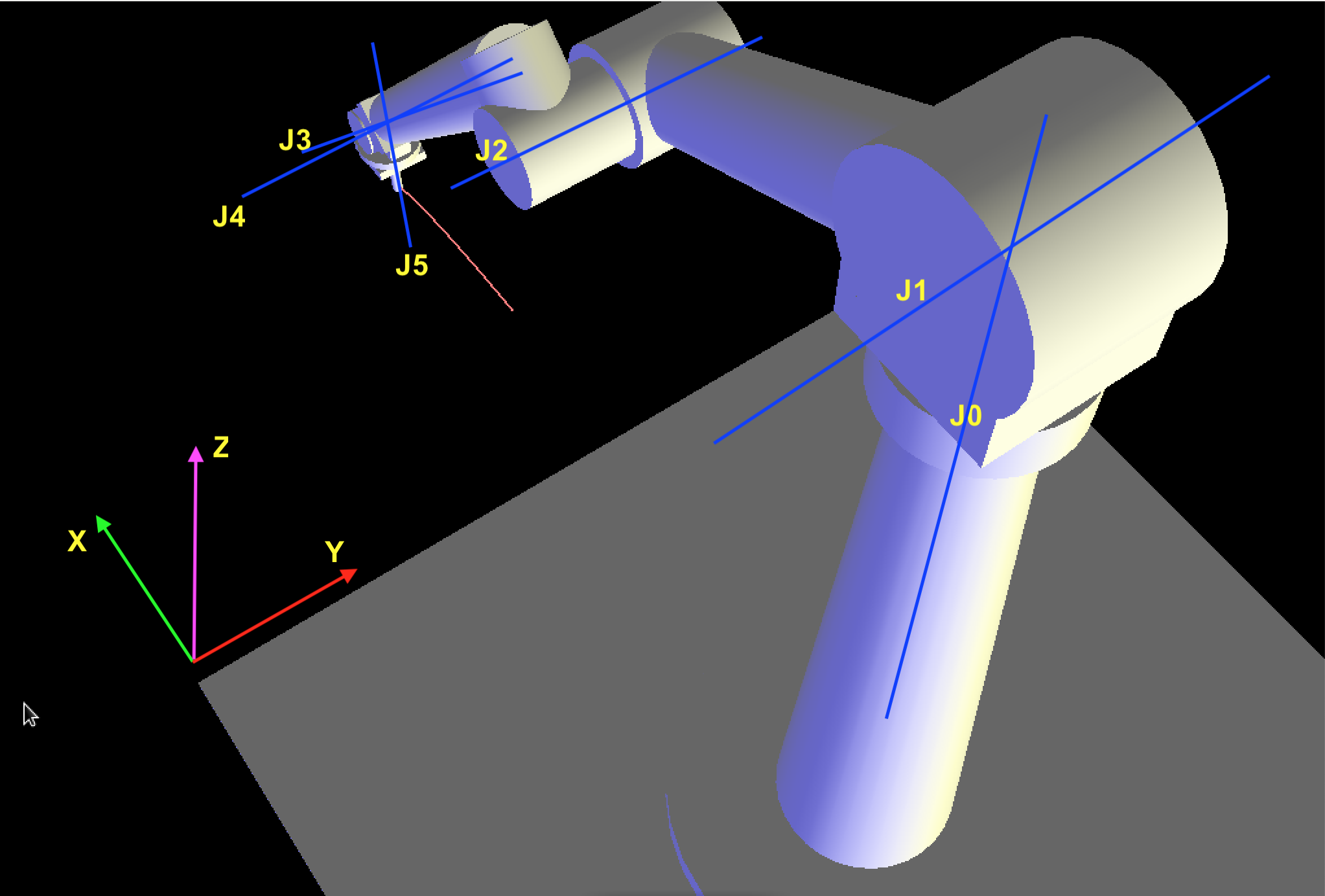
I only moved the X axis positively, so the kinematics should be like 2d robot, and that's true because only J1, J2 and J4 (joints) moved to keep the tool moving in the X axis.
So, based on the vismatch simulator I drew so I can understand how is the coordinate system and the joints:
Everything makes sense except a few things, so...
MY QUESTIONS ARE:
THANK YOU VERY MUCH!
I've been reading and struggling with this for quite a few time now, and there are a few things I can't get, if you don't want to read this all, I have added 3 questions at the end.
In my previous question here there was some discrepancy because I see a 6 degrees robot, but someone told me that PUMA should be 5 degrees robot, but I still see 6 joints and after some research in the code and HAL and puma configurations I couldn't find where the geometry is defined (except for a few parameters).
=================================================================
I will explain what I did , and how I did it.
PUMAKINS
To learn more about the geometry I have add some debug information inside pumakins.c so I can dump information about the joints and the EmcPose... I created a very simple function:
void dump(const double * joint, EmcPose* ptr) {
printf("J0,J1,J2,J3,J4,J5,x,y,z,a,b,c,u,v,w\n");
printf("%f,%f,%f,%f,%f,%f,", joint[0], joint[1], joint[2], joint[3], joint[4], joint[5]);
printf("%f,%f,%f,%f,%f,%f,%f,%f,%f\n", ptr->tran.x, ptr->tran.y, ptr->tran.z, ptr->a, ptr->b, ptr->c, ptr->u, ptr->v, ptr->w);
}And added that at the end of the kinematicsForward method so I can see what is going on, and after some depuration of the output I got this xls file with the joints and world positions:
Spreadsheet
I only moved the X axis positively, so the kinematics should be like 2d robot, and that's true because only J1, J2 and J4 (joints) moved to keep the tool moving in the X axis.
So, based on the vismatch simulator I drew so I can understand how is the coordinate system and the joints:
Everything makes sense except a few things, so...
MY QUESTIONS ARE:
- Where is the PUMA geometry defined? (link sizes, offset and relative angles between joints)
- When homed , all the angles are ZERO, so it looks like they're showing the movement on each joint instead of the axis itself. Why is that?
- Can I assume the tip of the tool is perpendicular to the X axis here?
THANK YOU VERY MUCH!
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21763
- Thank you received: 7438
21 Jul 2019 22:48 #140118
by tommylight
Replied by tommylight on topic PUMA geometry
There should be a pumakins and/or genserkins module in linuxcnc for that.
Not sure as i never used it. Might want to wait till someone with more experience chimes in.
For Kuka robots, i know a lot, have already installed and modified some of them.
Not sure as i never used it. Might want to wait till someone with more experience chimes in.
For Kuka robots, i know a lot, have already installed and modified some of them.
Please Log in or Create an account to join the conversation.
- felixcnc
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 0
21 Jul 2019 23:03 #140119
by felixcnc
Replied by felixcnc on topic PUMA geometry
Just out of curiosity, KUKA has 5 joints, right?
(Because unfortunately I need 6. My teacher has a 6 joints' robot and he wants to start using it again, that's why I am doing this research)
Thank you!
(Because unfortunately I need 6. My teacher has a 6 joints' robot and he wants to start using it again, that's why I am doing this research)
Thank you!
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21763
- Thank you received: 7438
21 Jul 2019 23:15 #140121
by tommylight
Replied by tommylight on topic PUMA geometry
Kuka has 6 at least, they are the big robots you see in movie's and large car factories, Tesla and Mercedes use a lot of them, Airbus uses some of their equipment to move heavy aeroplane parts, etc. As a reference, a small robot made by them, the cheapest one costs roughly 100000 euro. Their technology for teaching robots is very good and easy to get used to.
Used ones can be found on ebay for 5000 and up.
They do not use Linuxcnc, the older ones used a stripped down version of windows, new ones use Linux as far as i can gather.
Used ones can be found on ebay for 5000 and up.
They do not use Linuxcnc, the older ones used a stripped down version of windows, new ones use Linux as far as i can gather.
Please Log in or Create an account to join the conversation.
- felixcnc
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 0
24 Jul 2019 17:59 #140447
by felixcnc
Replied by felixcnc on topic PUMA geometry
Well... I have checked and there's a genserkin and I put some debug lines there trying to get some prints on the screen, but I had no luck.
I spoke with my professor at the university and he told me that we can use a kuka for now to get the kinematics done.
So... I am back to this topic but now asking you for help")
- Where do you think it's a good place to start to get a kuka robot arm working with LinuxCNC?
For exmaple, what HAL can I use?, where is the geometry defined?, can I see one from vismatch?
Thank you very much indeed,
Cheers
Thanks!
I spoke with my professor at the university and he told me that we can use a kuka for now to get the kinematics done.
So... I am back to this topic but now asking you for help
- Where do you think it's a good place to start to get a kuka robot arm working with LinuxCNC?
For exmaple, what HAL can I use?, where is the geometry defined?, can I see one from vismatch?
Thank you very much indeed,
Cheers
Thanks!
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21763
- Thank you received: 7438
24 Jul 2019 19:15 #140458
by tommylight
Replied by tommylight on topic PUMA geometry
I never used or did anything with Kuka and Linuxcnc.
Kuka with it's own software and hardware.
Linuxcnx with many types of machines but no robot, yet.
If you plan on modifying a kuka to work with Linuxcnc, you need a lot of reading and most probably an electronics engenier with experience.
Kuka use resolvers for feedback and drives motors with 600V, so a lot of caution is required.
This info is for KR150 and above, never done anything smaller.
Kuka with it's own software and hardware.
Linuxcnx with many types of machines but no robot, yet.
If you plan on modifying a kuka to work with Linuxcnc, you need a lot of reading and most probably an electronics engenier with experience.
Kuka use resolvers for feedback and drives motors with 600V, so a lot of caution is required.
This info is for KR150 and above, never done anything smaller.
Please Log in or Create an account to join the conversation.
- BigJohnT
-

- Offline
- Administrator
-

Less
More
- Posts: 3990
- Thank you received: 994
24 Jul 2019 20:55 #140474
by BigJohnT
Replied by BigJohnT on topic PUMA geometry
You might ask this question on the mailing list, a different group read that.
linuxcnc.org/community/
JT
linuxcnc.org/community/
JT
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
27 Jul 2019 18:16 - 27 Jul 2019 18:17 #140758
by andypugh
It would be great if Vismach followed Genserkins, but at the moment Vismach and Genserkins move the robot independently. Vismach does not use kinematics, as such.
Gensekins defines the robot geometry using Modified Denavit Hartenberg parameters. That defines the joint lengths and the orientations of the joints.
Replied by andypugh on topic PUMA geometry
where is the geometry defined?,
It would be great if Vismach followed Genserkins, but at the moment Vismach and Genserkins move the robot independently. Vismach does not use kinematics, as such.
Gensekins defines the robot geometry using Modified Denavit Hartenberg parameters. That defines the joint lengths and the orientations of the joints.
Last edit: 27 Jul 2019 18:17 by andypugh.
Please Log in or Create an account to join the conversation.
- deanforbes
- Offline
- New Member
-

Less
More
- Posts: 13
- Thank you received: 1
28 Jul 2019 08:46 - 28 Jul 2019 08:47 #140795
by deanforbes
Replied by deanforbes on topic PUMA geometry
There have been some discusion on the forum in the past that may help you
forum.linuxcnc.org/38-general-linuxcnc-q...nto-linuxcnc?start=0
forum.linuxcnc.org/10-advanced-configura...config-picker#109454
A group of us got an arm working some time ago - it is a 6 axis arm but I believe only 5 are referenced in the file here is the code that was used if you want to use it as a sample/reference to work from
github.com/deanforbes/Staubli_RX60L/tree/master/Linuxcnc/RL
github.com/deanforbes/Staubli_RX60L/tree...avit_hartenberg/Ross
forum.linuxcnc.org/38-general-linuxcnc-q...nto-linuxcnc?start=0
forum.linuxcnc.org/10-advanced-configura...config-picker#109454
A group of us got an arm working some time ago - it is a 6 axis arm but I believe only 5 are referenced in the file here is the code that was used if you want to use it as a sample/reference to work from
github.com/deanforbes/Staubli_RX60L/tree/master/Linuxcnc/RL
github.com/deanforbes/Staubli_RX60L/tree...avit_hartenberg/Ross
Last edit: 28 Jul 2019 08:47 by deanforbes.
Please Log in or Create an account to join the conversation.
- felixcnc
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 0
29 Jul 2019 15:16 #140889
by felixcnc
Replied by felixcnc on topic PUMA geometry
Thank you very much indeed. I think this is EXACTLY what I was looking for, I will have to read this carefully, because at first sight it looks VERY interesting.
The PDF is VERY clear to determine how the DH parameters are set, now I have to read all the configurations (hal + ini).
Thanks again, I really appreciate this, because I think this is an incredibly good foundation stone for all the work I have to do with this.
THANKS!
The PDF is VERY clear to determine how the DH parameters are set, now I have to read all the configurations (hal + ini).
Thanks again, I really appreciate this, because I think this is an incredibly good foundation stone for all the work I have to do with this.
THANKS!
Please Log in or Create an account to join the conversation.
Time to create page: 0.110 seconds