Gmocappy fires relay twice
- bevins
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1947
- Thank you received: 338
07 Sep 2019 16:13 - 07 Sep 2019 16:17 #144488
by bevins
halui,machine-is-on is driving machine-is-on.
Hal File
custom.hal
Replied by bevins on topic Gmocappy fires relay twice
what drives the signal 'machine-is-on'?
Chris M
When you press the on button in the gui.
Gmocappy version 3.08
I think what Chris meant is: what drives the 'machine-is-on' signal in the hal file
Could you post your hal files?
halui,machine-is-on is driving machine-is-on.
Hal File
Warning: Spoiler!
# Generated by PNCconf at Fri Sep 6 12:30:24 2019
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="10.10.10.10" config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=000xxx"
setp hm2_7i92.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_7i92.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_7i92.0.write servo-thread
setp hm2_7i92.0.dpll.01.timer-us -50
#setp hm2_7i92.0.stepgen.timer-number 1
# external output signals
# external input signals
# --- HOME-X ---
net home-x <= hm2_7i92.0.gpio.018.in
# --- HOME-Y ---
net home-y <= hm2_7i92.0.gpio.019.in
# --- HOME-Z ---
net home-z <= hm2_7i92.0.gpio.021.in
# --- BOTH-X ---
#net both-x <= hm2_7i92.0.gpio.022.in
# --- BOTH-Y ---
#net both-y <= hm2_7i92.0.gpio.023.in
# --- BOTH-Z ---
#net both-z <= hm2_7i92.0.gpio.025.in
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# ---PWM Generator signals/setup---
setp hm2_7i92.0.7i77.0.1.analogout0-scalemax [JOINT_0]OUTPUT_SCALE
setp hm2_7i92.0.7i77.0.1.analogout0-minlim [JOINT_0]OUTPUT_MIN_LIMIT
setp hm2_7i92.0.7i77.0.1.analogout0-maxlim [JOINT_0]OUTPUT_MAX_LIMIT
net x-output => hm2_7i92.0.7i77.0.1.analogout0
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-enable <= joint.0.amp-enable-out
# enable _all_ sserial pwmgens
net x-enable => hm2_7i92.0.7i77.0.1.analogena
# ---Encoder feedback signals/setup---
setp hm2_7i92.0.encoder.00.counter-mode 0
setp hm2_7i92.0.encoder.00.filter 1
setp hm2_7i92.0.encoder.00.index-invert 0
setp hm2_7i92.0.encoder.00.index-mask 0
setp hm2_7i92.0.encoder.00.index-mask-invert 0
setp hm2_7i92.0.encoder.00.scale [JOINT_0]ENCODER_SCALE
net x-pos-fb <= hm2_7i92.0.encoder.00.position
net x-vel-fb <= hm2_7i92.0.encoder.00.velocity
net x-pos-fb => joint.0.motor-pos-fb
net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_7i92.0.encoder.00.rawcounts
# ---setup home / limit switch signals---
net home-x => joint.0.home-sw-in
net both-x => joint.0.neg-lim-sw-in
net both-x => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# ---PWM Generator signals/setup---
setp hm2_7i92.0.7i77.0.1.analogout1-scalemax [JOINT_1]OUTPUT_SCALE
setp hm2_7i92.0.7i77.0.1.analogout1-minlim [JOINT_1]OUTPUT_MIN_LIMIT
setp hm2_7i92.0.7i77.0.1.analogout1-maxlim [JOINT_1]OUTPUT_MAX_LIMIT
net y-output => hm2_7i92.0.7i77.0.1.analogout1
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-enable <= joint.1.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_7i92.0.encoder.01.counter-mode 0
setp hm2_7i92.0.encoder.01.filter 1
setp hm2_7i92.0.encoder.01.index-invert 0
setp hm2_7i92.0.encoder.01.index-mask 0
setp hm2_7i92.0.encoder.01.index-mask-invert 0
setp hm2_7i92.0.encoder.01.scale [JOINT_1]ENCODER_SCALE
net y-pos-fb <= hm2_7i92.0.encoder.01.position
net y-vel-fb <= hm2_7i92.0.encoder.01.velocity
net y-pos-fb => joint.1.motor-pos-fb
net y-index-enable joint.1.index-enable <=> hm2_7i92.0.encoder.01.index-enable
net y-pos-rawcounts <= hm2_7i92.0.encoder.01.rawcounts
# ---setup home / limit switch signals---
net home-y => joint.1.home-sw-in
net both-y => joint.1.neg-lim-sw-in
net both-y => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# ---PWM Generator signals/setup---
setp hm2_7i92.0.7i77.0.1.analogout3-scalemax [JOINT_2]OUTPUT_SCALE
setp hm2_7i92.0.7i77.0.1.analogout3-minlim [JOINT_2]OUTPUT_MIN_LIMIT
setp hm2_7i92.0.7i77.0.1.analogout3-maxlim [JOINT_2]OUTPUT_MAX_LIMIT
net z-output => hm2_7i92.0.7i77.0.1.analogout3
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-enable <= joint.2.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_7i92.0.encoder.03.counter-mode 0
setp hm2_7i92.0.encoder.03.filter 1
setp hm2_7i92.0.encoder.03.index-invert 0
setp hm2_7i92.0.encoder.03.index-mask 0
setp hm2_7i92.0.encoder.03.index-mask-invert 0
setp hm2_7i92.0.encoder.03.scale [JOINT_2]ENCODER_SCALE
net z-pos-fb <= hm2_7i92.0.encoder.03.position
net z-vel-fb <= hm2_7i92.0.encoder.03.velocity
net z-pos-fb => joint.2.motor-pos-fb
net z-index-enable joint.2.index-enable <=> hm2_7i92.0.encoder.03.index-enable
net z-pos-rawcounts <= hm2_7i92.0.encoder.03.rawcounts
# ---setup home / limit switch signals---
net home-z => joint.2.home-sw-in
net both-z => joint.2.neg-lim-sw-in
net both-z => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
#setp pid.s.Pgain [SPINDLE_9]P
#setp pid.s.Igain [SPINDLE_9]I
#setp pid.s.Dgain [SPINDLE_9]D
#setp pid.s.bias [SPINDLE_9]BIAS
#setp pid.s.FF0 [SPINDLE_9]FF0
#setp pid.s.FF1 [SPINDLE_9]FF1
#setp pid.s.FF2 [SPINDLE_9]FF2
#setp pid.s.deadband [SPINDLE_9]DEADBAND
#setp pid.s.maxoutput [SPINDLE_9]MAX_OUTPUT
#setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm => pid.s.command
net spindle-vel-fb-rpm => pid.s.feedback
net spindle-output <= pid.s.output
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
#net estop-out <= iocontrol.0.user-enable-out
#net estop-out => iocontrol.0.emc-enable-in
loadrt estop_latch
addf estop-latch.0 servo-thread
net estop-loopout iocontrol.0.emc-enable-in <= estop-latch.0.ok-out
net estop-loopin iocontrol.0.user-enable-out => estop-latch.0.ok-in
net estop-reset iocontrol.0.user-request-enable => estop-latch.0.reset
net estop-estop estop-latch.0.fault-in <= hm2_7i92.0.7i77.0.0.input-00-not
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
custom.hal
Warning: Spoiler!
# Include your custom HAL commands here
# This file will not be overwritten when you run PNCconf again
net machine-is-on hm2_7i92.0.7i77.0.0.output-00 hm2_7i92.0.7i77.0.0.output-01 hm2_7i92.0.7i77.0.0.output-02
Last edit: 07 Sep 2019 16:17 by bevins.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17992
- Thank you received: 5281
07 Sep 2019 19:40 #144492
by PCW
Replied by PCW on topic Gmocappy fires relay twice
Does your axis config use halui the same way?
What pokes halui.machine.on and halui.machine.off ?
What pokes halui.machine.on and halui.machine.off ?
Please Log in or Create an account to join the conversation.
- dgarrett
- Offline
- Platinum Member
-
Less
More
- Posts: 492
- Thank you received: 297
07 Sep 2019 20:19 #144493
by dgarrett
Replied by dgarrett on topic Gmocappy fires relay twice
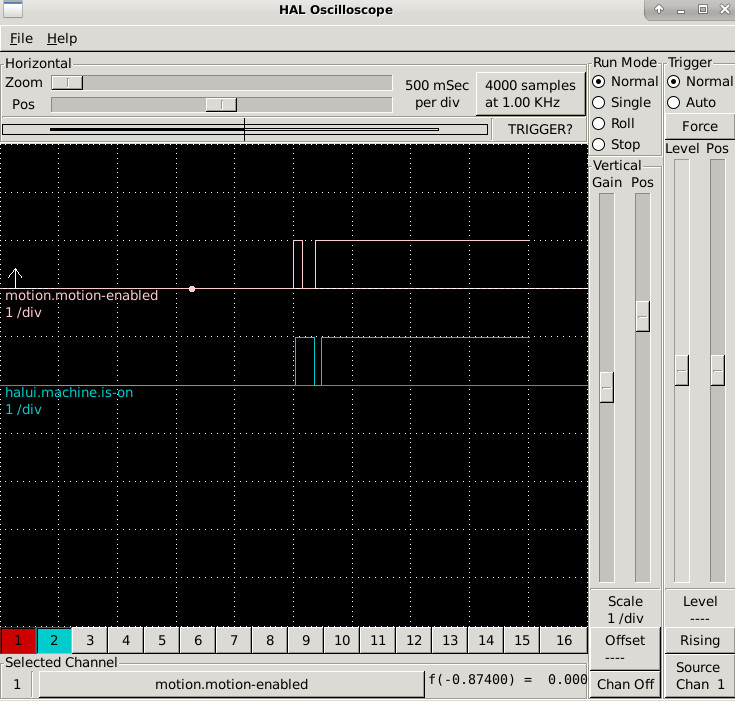
The userspace pin halui.machine.is-on is following
realtime motion pin motion.motion-enabled.
Some investigation shows this behavior with gmoccapy
has existed for a while -- it has probably just
never been reported.
The problematic code is likely in this function or
its triggers (2.8 branch):
github.com/LinuxCNC/linuxcnc/blob/fbd3f7...py/gmoccapy.py#L2296
Using configs/sim/gmoccapy/gmoccapy.ini, Pressing the Machine-On button:
Suggestion: file a bug report (issue) on github and/or notify Norbert
realtime motion pin motion.motion-enabled.
Some investigation shows this behavior with gmoccapy
has existed for a while -- it has probably just
never been reported.
The problematic code is likely in this function or
its triggers (2.8 branch):
github.com/LinuxCNC/linuxcnc/blob/fbd3f7...py/gmoccapy.py#L2296
Using configs/sim/gmoccapy/gmoccapy.ini, Pressing the Machine-On button:
Suggestion: file a bug report (issue) on github and/or notify Norbert
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
08 Sep 2019 02:50 #144501
by bevins
Yes it does. This basically a generic pncconf. I am just starting towork on the configs and I wanted the customer to use gmocappy.
I am really comfortable with Axis, so I am testing in axis and thenmodifying gmocappy config. I have two machine configs.
Replied by bevins on topic Gmocappy fires relay twice
Does your axis config use halui the same way?
What pokes halui.machine.on and halui.machine.off ?
Yes it does. This basically a generic pncconf. I am just starting towork on the configs and I wanted the customer to use gmocappy.
I am really comfortable with Axis, so I am testing in axis and thenmodifying gmocappy config. I have two machine configs.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
08 Sep 2019 03:04 - 08 Sep 2019 03:23 #144502
by bevins
What is triggering motion.motion-enable?
/EDIT nevermind I think I understand how it works. The function (on_tbtn_on_toggled) looks like it works. Must be in the triggers in the widgets.
Where can I create a bug report?
Replied by bevins on topic Gmocappy fires relay twice
The userspace pin halui.machine.is-on is following
realtime motion pin motion.motion-enabled.
Some investigation shows this behavior with gmoccapy
has existed for a while -- it has probably just
never been reported.
The problematic code is likely in this function or
its triggers (2.8 branch):
github.com/LinuxCNC/linuxcnc/blob/fbd3f7...py/gmoccapy.py#L2296
Using configs/sim/gmoccapy/gmoccapy.ini, Pressing the Machine-On button:
What is triggering motion.motion-enable?
/EDIT nevermind I think I understand how it works. The function (on_tbtn_on_toggled) looks like it works. Must be in the triggers in the widgets.
Where can I create a bug report?
Last edit: 08 Sep 2019 03:23 by bevins.
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-
Less
More
- Posts: 7341
- Thank you received: 2164
08 Sep 2019 08:40 #144505
by cmorley
Replied by cmorley on topic Gmocappy fires relay twice
Please Log in or Create an account to join the conversation.
- newbynobi
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1931
- Thank you received: 394
10 Sep 2019 14:56 #144706
by newbynobi
Replied by newbynobi on topic Gmocappy fires relay twice
Hallo @ALL,
i am able to reproduce the behavior. so now is just to find the reason and bug fix that one.
I apologize for the inconvenience.
Norbert
i am able to reproduce the behavior. so now is just to find the reason and bug fix that one.
I apologize for the inconvenience.
Norbert
The following user(s) said Thank You: bevins, tommylight
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
08 Jan 2020 20:14 #154343
by bevins
Replied by bevins on topic Gmocappy fires relay twice
Any headway on this issue?
Please Log in or Create an account to join the conversation.
- newbynobi
-
- Offline
- Platinum Member
-
Less
More
- Posts: 1931
- Thank you received: 394
31 Dec 2020 13:15 #193646
by newbynobi
Replied by newbynobi on topic Gmocappy fires relay twice
I just tested this one with gmoccapy 3.1.0 (the latest release from 2.8 branch)
As far as I can see from hal scope, the behavior has been fixed.
Please test with latest 2.8 release and gmoccapy 3.1.0.
I will close the issue, if it has not been solved, please reopen it.
Norbert
As far as I can see from hal scope, the behavior has been fixed.
Please test with latest 2.8 release and gmoccapy 3.1.0.
I will close the issue, if it has not been solved, please reopen it.
Norbert
Please Log in or Create an account to join the conversation.
Time to create page: 0.144 seconds