2 arm delta
- An
- Offline
- Senior Member
-

Less
More
- Posts: 53
- Thank you received: 3
11 Nov 2019 19:48 #150151
by An
2 arm delta was created by An
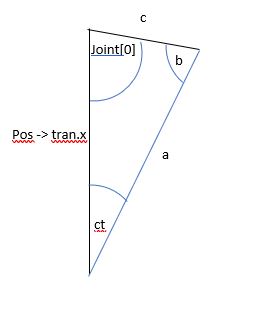
Hello, I am a beginner user of Linuxcnc and am trying to get a simple mechanism controlled. It is like a two arm delta robot but has only one motor to control both arms through a couple of gears. I have modified the trivkins file with trig that represents a simplified version of the mechanism but now I am lost. The fwd and inverse kins return the same values when i check them manually but when i start linuxcnc - home the axis - swithch to MDI the joint [0] i have modified runs away with no input. I have linuxcnc 2.5.5 running on Ubuntu. Maybe I need need to make some modifications to the HAL? I looked at the delta robot kins and see there are modifications to include the lengths of the arms, do i need to include this or can it all be achieved with modifications to the kinematics file?
I have tried to include my kins file and an image to explain how i got to it (hopefully it works). The image shows just half of the mechanism, the other half being the mirror. Hopefully it makes sense (or maybe not)... Also a picture of an industrial 2 arm delta robot.
I have read a lot and feel like im getting close but its getting frustrating!
Any and all help would be greatly appreciated and my apologies if this is the wrong way to do things - im new at this.
Thank you very much!

I have tried to include my kins file and an image to explain how i got to it (hopefully it works). The image shows just half of the mechanism, the other half being the mirror. Hopefully it makes sense (or maybe not)... Also a picture of an industrial 2 arm delta robot.
I have read a lot and feel like im getting close but its getting frustrating!
Any and all help would be greatly appreciated and my apologies if this is the wrong way to do things - im new at this.
Thank you very much!
Attachments:
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-

Less
More
- Posts: 1317
- Thank you received: 453
11 Nov 2019 23:21 #150159
by Hakan
Replied by Hakan on topic 2 arm delta
Try and change the kinematics type to KINEMATICS_BOTH , maybe things change.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19886
- Thank you received: 4645
12 Nov 2019 14:07 #150198
by andypugh
Replied by andypugh on topic 2 arm delta
It doesn't seem likely that changing joint-0 only changes X and not Y?
So I don't think that your kinematics is correct.
Does the joint "run away" in a simulator, or is this an actual physical runaway?
So I don't think that your kinematics is correct.
Does the joint "run away" in a simulator, or is this an actual physical runaway?
Please Log in or Create an account to join the conversation.
- An
- Offline
- Senior Member
-
Less
More
- Posts: 53
- Thank you received: 3
12 Nov 2019 20:33 #150247
by An
Replied by An on topic 2 arm delta
Thanks Andy, the link can only move in one axis. I probably should have used Z. The closest analogy i can think of would be replacing the Z axis on a standard cartesian mill with this delta 2 style mechanism - so it is only moving up and down. Does your comment from above still apply? If so i really don't have a clue about what is going on...
Thanks for taking the time to respond.
Thanks for taking the time to respond.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
12 Nov 2019 20:46 #150250
by andypugh
Replied by andypugh on topic 2 arm delta
OK, I think I see how it works now.
So, back to the question, does a simulator run away if you use your kinematics?
So, back to the question, does a simulator run away if you use your kinematics?
Please Log in or Create an account to join the conversation.
- An
- Offline
- Senior Member
-
Less
More
- Posts: 53
- Thank you received: 3
12 Nov 2019 21:23 #150253
by An
Replied by An on topic 2 arm delta
Yes the simulator runs away as soon as i put it into MDI mode. I think the kins are off as i didnt fully appreciate how it all relates (probably still dont). I will set up an excel sheet as you suggested somewhere to check everything.
I asked another question in a separate thread regarding some odd values I get from trig functions sin, cos etc. Im not sure if i should have asked this separately but thought it might help others find it if they have the same problem. Would be very keen to hear your thoughts on this as maybe it is related. It is amazing having access to someone with your knowledge on here Andy!
forum.linuxcnc.org/38-general-linuxcnc-q...t-from-trig-function
I asked another question in a separate thread regarding some odd values I get from trig functions sin, cos etc. Im not sure if i should have asked this separately but thought it might help others find it if they have the same problem. Would be very keen to hear your thoughts on this as maybe it is related. It is amazing having access to someone with your knowledge on here Andy!
forum.linuxcnc.org/38-general-linuxcnc-q...t-from-trig-function
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
13 Nov 2019 06:45 #150269
by Hakan
Replied by Hakan on topic 2 arm delta
I see you also here mix degrees and radians.
The output from trig functions is radians and that is also what they need as inputs.
A "180" is clearly wrong here, should be M_PI.
Also check how the values for the joints come over as - degrees? Radians?
May need to convert back and forth to radians. Or degrees if that's what the joint value is.
The output from trig functions is radians and that is also what they need as inputs.
A "180" is clearly wrong here, should be M_PI.
Also check how the values for the joints come over as - degrees? Radians?
May need to convert back and forth to radians. Or degrees if that's what the joint value is.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
13 Nov 2019 12:06 #150286
by andypugh
Replied by andypugh on topic 2 arm delta
radians / degrees might be all that is needed to explain the runaway.
Also the calculation should be able to use the equation here:
www.mathsisfun.com/algebra/trig-solving-sas-triangles.html
ie, I don't think you should need to calculate the "ct" term.
But you do need to either scale and home joint[0] in radians, or convert to radians. But in either case that joint angle should be usable without modification if it has the right home position defined.
Also the calculation should be able to use the equation here:
www.mathsisfun.com/algebra/trig-solving-sas-triangles.html
ie, I don't think you should need to calculate the "ct" term.
But you do need to either scale and home joint[0] in radians, or convert to radians. But in either case that joint angle should be usable without modification if it has the right home position defined.
Please Log in or Create an account to join the conversation.
- An
- Offline
- Senior Member
-
Less
More
- Posts: 53
- Thank you received: 3
13 Nov 2019 23:11 #150330
by An
Replied by An on topic 2 arm delta
Thanks for the help everyone. Radians was one error and i had forgotten to subtract the length of the arm at the home position from the fwd kins.
No doubt il be back here soon!
No doubt il be back here soon!
Please Log in or Create an account to join the conversation.
- An
- Offline
- Senior Member
-
Less
More
- Posts: 53
- Thank you received: 3
14 Nov 2019 00:51 #150335
by An
Replied by An on topic 2 arm delta
Sooner than I thought!
Hopefully this is just a trivial thing.
So everything works as expected in joint mode. The machine seems to be homed to some arbitrary position. The machine then moves from home to the commanded position and this is a lot more movement than is actually happening in joint mode? Il go through and read more tonight but thought id ask here in case someone has a easy/obvious fix!
Thanks again!
Hopefully this is just a trivial thing.
So everything works as expected in joint mode. The machine seems to be homed to some arbitrary position. The machine then moves from home to the commanded position and this is a lot more movement than is actually happening in joint mode? Il go through and read more tonight but thought id ask here in case someone has a easy/obvious fix!
Thanks again!
Please Log in or Create an account to join the conversation.
Time to create page: 0.108 seconds