AYZ gantry machine retrofit
- bevins
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1947
- Thank you received: 338
01 Dec 2019 16:51 - 01 Dec 2019 17:35 #151667
by bevins
AYZ gantry machine retrofit was created by bevins
I am going out of town to do this retrofit next weekend. Just looking if someone can look my configs over to spot anythingobvious
I overlooked.
3 axis gantry router
linuxcnc 2.9.0
linuxmint 18.3
Linuxcnc starts, obvious I can't home because machine is not connected and I get following errors so I believe this is correct.
Y axis has two motors
INI file:
HAL file:
I overlooked.
3 axis gantry router
linuxcnc 2.9.0
linuxmint 18.3
Linuxcnc starts, obvious I can't home because machine is not connected and I get following errors so I believe this is correct.
Y axis has two motors
INI file:
Warning: Spoiler!
# Generated by PNCconf at Sat Nov 30 09:20:28 2019
# Using LinuxCNC version: 2.9.0-pre
# Bob Bevins for AXYZ machine 3 axis Gantry Machine
#
[EMC]
MACHINE = AXYZ-1
DEBUG = 0
VERSION = 1.1
[DISPLAY]
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_OVERRIDE = 1.000000
MIN_SPINDLE_OVERRIDE = 0.500000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/fab1/linuxcnc/nc_files
INCREMENTS = .1in .05in .01in .005in .001in .0005in .0001in
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 0.250000
MAX_LINEAR_VELOCITY = 1.000000
MIN_LINEAR_VELOCITY = 0.016670
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
SERVO_PERIOD = 1000000
[HMOT]
# **** This is for info only ****
CARD0=hm2_7i92.0
[HAL]
HALUI = halui
HALFILE = AXYZ-1.hal
HALFILE = custom.hal
POSTGUI_HALFILE = postgui_call_list.hal
SHUTDOWN = shutdown.hal
[HALUI]
[KINS]
JOINTS = 4
KINEMATICS = trivkins coordinates=XYYZ
[TRAJ]
COORDINATES = XYYZ
LINEAR_UNITS = inch
ANGULAR_UNITS = degree
DEFAULT_LINEAR_VELOCITY = 0.10
MAX_LINEAR_VELOCITY = 1.00
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
#******************************************
[AXIS_X]
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
MIN_LIMIT = -0.001
MAX_LIMIT = 8.0
[JOINT_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 1.25
STEPGEN_MAXACCEL = 37.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -0.001
MAX_LIMIT = 8.0
HOME_OFFSET = 0.0
HOME_SEARCH_VEL = -0.050000
HOME_LATCH_VEL = -0.016667
HOME_FINAL_VEL = 0.000000
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_SEQUENCE = 1
#******************************************
#******************************************
[AXIS_Y]
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
MIN_LIMIT = -0.001
MAX_LIMIT = 8.0
[JOINT_1]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 1.25
STEPGEN_MAXACCEL = 37.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -0.001
MAX_LIMIT = 8.0
HOME_OFFSET = 0.0
HOME_SEARCH_VEL = -0.050000
HOME_LATCH_VEL = -0.016667
HOME_FINAL_VEL = 0.000000
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_SEQUENCE = -2
#******************************************
[JOINT_2]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 1.25
STEPGEN_MAXACCEL = 37.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -0.001
MAX_LIMIT = 8.0
HOME_OFFSET = 0.0
HOME_SEARCH_VEL = -0.050000
HOME_LATCH_VEL = -0.016667
HOME_FINAL_VEL = 0.000000
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_SEQUENCE = -2
#******************************************
#******************************************
[AXIS_Z]
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
MIN_LIMIT = -4.0
MAX_LIMIT = 0.001
[JOINT_3]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 1.25
STEPGEN_MAXACCEL = 37.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -4.0
MAX_LIMIT = 0.001
HOME_OFFSET = 0.0
HOME_SEARCH_VEL = -0.050000
HOME_LATCH_VEL = -0.016667
HOME_FINAL_VEL = 0.000000
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_SEQUENCE = 0
#******************************************
[SPINDLE_0]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 2000
HAL file:
Warning: Spoiler!
# Generated by PNCconf at Sat Nov 30 09:20:28 2019
# Using LinuxCNC version: 2.9.0-pre
# Bob Bevins for AXYZ machine 3 axis Gantry Machine
#
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="192.168.1.121" config=" num_encoders=1 num_pwmgens=0 num_stepgens=5 sserial_port_0=0000xx"
setp hm2_7i92.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.y2,pid.z,pid.s
addf hm2_7i92.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_7i92.0.write servo-thread
setp hm2_7i92.0.dpll.01.timer-us -50
setp hm2_7i92.0.stepgen.timer-number 1
# external output signals
# external input signals
# --- BOTH-X ---
net both-home-x <= hm2_7i92.0.7i76.0.0.input-01
# --- BOTH-Y ---
net both-home-y <= hm2_7i92.0.7i76.0.0.input-02
net both-home-y1 <= hm2_7i92.0.7i76.0.0.input-03
# --- BOTH-Z ---
net both-home-z <= hm2_7i92.0.7i76.0.0.input-04
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
setp pid.x.maxerror .0005
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i92.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_7i92.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_7i92.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_7i92.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i92.0.stepgen.00.step_type 0
setp hm2_7i92.0.stepgen.00.control-type 1
setp hm2_7i92.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output <= hm2_7i92.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i92.0.stepgen.00.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i92.0.stepgen.00.enable
# ---setup home / limit switch signals---
net both-home-x => joint.0.home-sw-in
net both-home-x => joint.0.neg-lim-sw-in
net both-home-x => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
setp pid.y.maxerror .0005
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp hm2_7i92.0.stepgen.01.dirhold [JOINT_1]DIRHOLD
setp hm2_7i92.0.stepgen.01.steplen [JOINT_1]STEPLEN
setp hm2_7i92.0.stepgen.01.stepspace [JOINT_1]STEPSPACE
setp hm2_7i92.0.stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp hm2_7i92.0.stepgen.01.step_type 0
setp hm2_7i92.0.stepgen.01.control-type 1
setp hm2_7i92.0.stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-output <= hm2_7i92.0.stepgen.01.velocity-cmd
net y-pos-fb <= hm2_7i92.0.stepgen.01.position-fb
net y-pos-fb => joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
net y-enable => hm2_7i92.0.stepgen.01.enable
# ---setup home / limit switch signals---
net both-home-y => joint.1.home-sw-in
net both-home-y => joint.1.neg-lim-sw-in
net both-home-y => joint.1.pos-lim-sw-in
#*******************
# AXIS Y JOINT 2
#*******************
setp pid.y2.Pgain [JOINT_2]P
setp pid.y2.Igain [JOINT_2]I
setp pid.y2.Dgain [JOINT_2]D
setp pid.y2.bias [JOINT_2]BIAS
setp pid.y2.FF0 [JOINT_2]FF0
setp pid.y2.FF1 [JOINT_2]FF1
setp pid.y2.FF2 [JOINT_2]FF2
setp pid.y2.deadband [JOINT_2]DEADBAND
setp pid.y2.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.y2.error-previous-target true
setp pid.y2.maxerror .0005
net y2-index-enable <=> pid.y2.index-enable
net y2-enable => pid.y2.enable
net y2-pos-cmd => pid.y2.command
net y2-pos-fb => pid.y2.feedback
net y2-output <= pid.y2.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp hm2_7i92.0.stepgen.02.dirhold [JOINT_2]DIRHOLD
setp hm2_7i92.0.stepgen.02.steplen [JOINT_2]STEPLEN
setp hm2_7i92.0.stepgen.02.stepspace [JOINT_2]STEPSPACE
setp hm2_7i92.0.stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp hm2_7i92.0.stepgen.02.step_type 0
setp hm2_7i92.0.stepgen.02.control-type 1
setp hm2_7i92.0.stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y1-pos-cmd <= joint.2.motor-pos-cmd
net y1-vel-cmd <= joint.2.vel-cmd
net y1-output <= hm2_7i92.0.stepgen.02.velocity-cmd
net y1-pos-fb <= hm2_7i92.0.stepgen.02.position-fb
net y1-pos-fb => joint.2.motor-pos-fb
net y1-enable <= joint.2.amp-enable-out
net y1-enable => hm2_7i92.0.stepgen.02.enable
# ---setup home / limit switch signals---
net both-home-y1 => joint.2.home-sw-in
net both-home-y1 => joint.2.neg-lim-sw-in
net both-home-y1 => joint.2.pos-lim-sw-in
#*******************
# AXIS Z JOINT 3
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
setp pid.z.maxerror .0005
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.03.dirsetup [JOINT_3]DIRSETUP
setp hm2_7i92.0.stepgen.03.dirhold [JOINT_3]DIRHOLD
setp hm2_7i92.0.stepgen.03.steplen [JOINT_3]STEPLEN
setp hm2_7i92.0.stepgen.03.stepspace [JOINT_3]STEPSPACE
setp hm2_7i92.0.stepgen.03.position-scale [JOINT_3]STEP_SCALE
setp hm2_7i92.0.stepgen.03.step_type 0
setp hm2_7i92.0.stepgen.03.control-type 1
setp hm2_7i92.0.stepgen.03.maxaccel [JOINT_3]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.03.maxvel [JOINT_3]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.3.motor-pos-cmd
net z-vel-cmd <= joint.3.vel-cmd
net z-output <= hm2_7i92.0.stepgen.03.velocity-cmd
net z-pos-fb <= hm2_7i92.0.stepgen.03.position-fb
net z-pos-fb => joint.3.motor-pos-fb
net z-enable <= joint.3.amp-enable-out
net z-enable => hm2_7i92.0.stepgen.03.enable
# ---setup home / limit switch signals---
net both-home-z => joint.3.home-sw-in
net both-home-z => joint.3.neg-lim-sw-in
net both-home-z => joint.3.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm => pid.s.command
net spindle-vel-fb-rpm => pid.s.feedback
net spindle-output <= pid.s.output
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
#net estop-out <= iocontrol.0.user-enable-out
#net estop-out => iocontrol.0.emc-enable-in
loadrt estop_latch
addf estop-latch.0 servo-thread
net estop-loopout iocontrol.0.emc-enable-in <= estop-latch.0.ok-out
net estop-loopin iocontrol.0.user-enable-out => estop-latch.0.ok-in
net estop-reset iocontrol.0.user-request-enable => estop-latch.0.reset
net remote-estop estop-latch.0.fault-in <= hm2_7i92.0.7i76.0.0.input-00-not
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Last edit: 01 Dec 2019 17:35 by bevins.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17996
- Thank you received: 5282
01 Dec 2019 16:58 #151668
by PCW
Replied by PCW on topic AYZ gantry machine retrofit
All the PID setup and connections are missing from the X,Y,Z axis
The following user(s) said Thank You: bevins
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
01 Dec 2019 17:35 #151671
by bevins
That's about as obvious as it could get.
I updated the HAL in the spoiler above.
The one question. This is the first time using the 7i76. The spindle out is 0-10v correct?
Replied by bevins on topic AYZ gantry machine retrofit
All the PID setup and connections are missing from the X,Y,Z axis
That's about as obvious as it could get.
I updated the HAL in the spoiler above.
The one question. This is the first time using the 7i76. The spindle out is 0-10v correct?
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5282
01 Dec 2019 17:39 - 01 Dec 2019 17:40 #151672
by PCW
Replied by PCW on topic AYZ gantry machine retrofit
The 7I76 (or 7I76E) spindle output is 0V to SPIN+ so if the SPIN+ terminal is
supplied with 5V you get 0 to 5V etc, That is, the output is a potentiometer replacement, it does
not supply the reference voltage (which can be from 5V to 15V between SPIN- and SPIN+)
supplied with 5V you get 0 to 5V etc, That is, the output is a potentiometer replacement, it does
not supply the reference voltage (which can be from 5V to 15V between SPIN- and SPIN+)
Last edit: 01 Dec 2019 17:40 by PCW.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
01 Dec 2019 17:49 #151675
by bevins
ok so I can apply com from vfd to spin- and 10v from vfd to spin+ then spindle out of 7i76 goes to where the wiper would go on the vfd. correct?
Replied by bevins on topic AYZ gantry machine retrofit
The 7I76 (or 7I76E) spindle output is 0V to SPIN+ so if the SPIN+ terminal is
supplied with 5V you get 0 to 5V etc, That is, the output is a potentiometer replacement, it does
not supply the reference voltage (which can be from 5V to 15V between SPIN- and SPIN+)
ok so I can apply com from vfd to spin- and 10v from vfd to spin+ then spindle out of 7i76 goes to where the wiper would go on the vfd. correct?
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
01 Dec 2019 17:57 #151677
by bevins
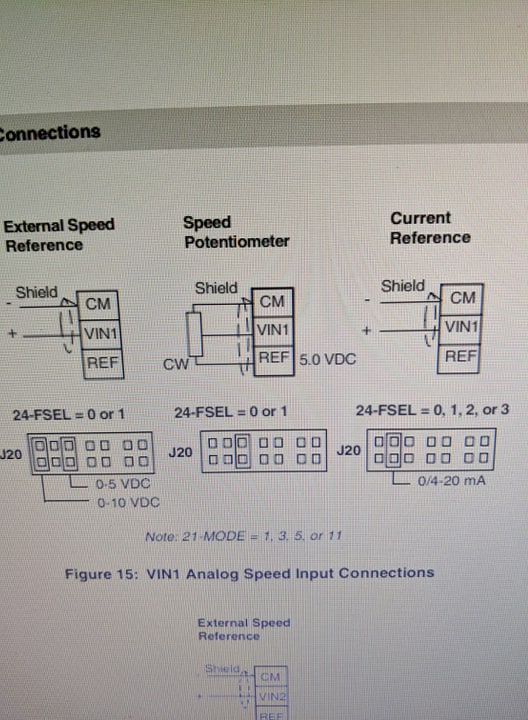
Replied by bevins on topic AYZ gantry machine retrofit
This is the VFD manual exert.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5282
01 Dec 2019 18:00 #151678
by PCW
Replied by PCW on topic AYZ gantry machine retrofit
Yes the 7I76 analog out is a potentiometer replacement
so
SPIN- --> CM
SPINOUT --> VIN
SPIN+ --> REF
so
SPIN- --> CM
SPINOUT --> VIN
SPIN+ --> REF
The following user(s) said Thank You: bevins
Please Log in or Create an account to join the conversation.
Time to create page: 0.106 seconds