Mesa stepgen motion profile and joint following error.
- thang
- Offline
- Elite Member
-

Less
More
- Posts: 196
- Thank you received: 11
25 Dec 2019 07:19 #153186
by thang
Mesa stepgen motion profile and joint following error. was created by thang
I'm using mesa 5i25 to control a yaskawa motor.
Joint following error often happen when motor accelerate and decelerate.
I made a quick test and see this happen because mesa motion profile (see below figure).
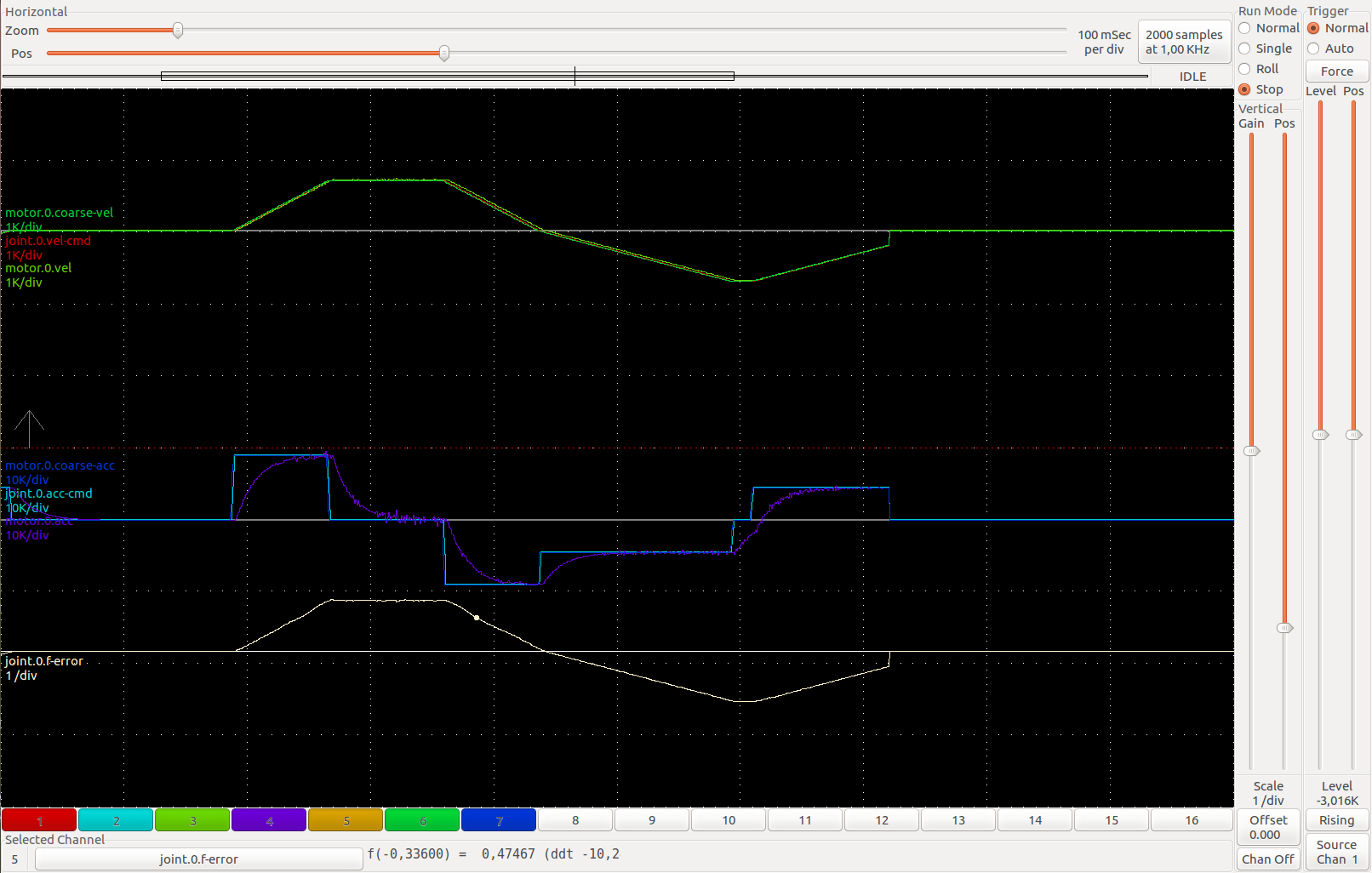
I want to leave this task for yaskawa drive so is there a way that i can change mesaprofile (to simple one) or lower jerk time?
Joint following error often happen when motor accelerate and decelerate.
I made a quick test and see this happen because mesa motion profile (see below figure).
I want to leave this task for yaskawa drive so is there a way that i can change mesaprofile (to simple one) or lower jerk time?
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17996
- Thank you received: 5282
25 Dec 2019 15:21 - 25 Dec 2019 15:40 #153196
by PCW
Replied by PCW on topic Mesa stepgen motion profile and joint following error.
1. The displayed following error (error proportional to velocity) is most likely caused by
incorrect FF1 tuning (or feedback scaling).
2. The acceleration mismatch is expected. This has nothing to do with step generation or hardware but
rather the fact the LinuxCNCs trajectory planner is a second order planner and has no jerk control.
That said, it looks like your drives have _WAY_ too much lag in acceleration
(they seem to have a almost 50 ms time constant) If the drives have any built in jerk limiting,
or command input low pass filtering, you may want to adjust these settings.
incorrect FF1 tuning (or feedback scaling).
2. The acceleration mismatch is expected. This has nothing to do with step generation or hardware but
rather the fact the LinuxCNCs trajectory planner is a second order planner and has no jerk control.
That said, it looks like your drives have _WAY_ too much lag in acceleration
(they seem to have a almost 50 ms time constant) If the drives have any built in jerk limiting,
or command input low pass filtering, you may want to adjust these settings.
Last edit: 25 Dec 2019 15:40 by PCW. Reason: format a bit better
Please Log in or Create an account to join the conversation.
- thang
- Offline
- Elite Member
-
Less
More
- Posts: 196
- Thank you received: 11
26 Dec 2019 03:22 #153213
by thang
Replied by thang on topic Mesa stepgen motion profile and joint following error.
the feedback signal is taken from hm2_5i25.0.stepgen.00.position-fb not from the motor encoder. It's an open loop system but following error keep anoying me
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5282
26 Dec 2019 16:36 - 26 Dec 2019 16:41 #153247
by PCW
Replied by PCW on topic Mesa stepgen motion profile and joint following error.
There is no jerk limiting in the stepgen hardware or driver so I suspect you have either an
instrumentation issue or something odd in your hal file.
Can you post you hal/ini files?
Here is an example of a Mesa stepgen running a profile with 20 IPS velocity and
somewhat greater than 1/2G acceleration:

Notice that the residual stepgen errors are less than 10 uinch
Your plots show a large following error proportion to velocity which suggests that either
1. FF1 is not set properly,
2. You have a thread order issue
3. You do not have pid.N.error-previous-target set true
4. You are using a new LinuxCNC installation (with fixed PID) and you have the PIDs command-deriv connected
instrumentation issue or something odd in your hal file.
Can you post you hal/ini files?
Here is an example of a Mesa stepgen running a profile with 20 IPS velocity and
somewhat greater than 1/2G acceleration:
Notice that the residual stepgen errors are less than 10 uinch
Your plots show a large following error proportion to velocity which suggests that either
1. FF1 is not set properly,
2. You have a thread order issue
3. You do not have pid.N.error-previous-target set true
4. You are using a new LinuxCNC installation (with fixed PID) and you have the PIDs command-deriv connected
Attachments:
Last edit: 26 Dec 2019 16:41 by PCW.
Please Log in or Create an account to join the conversation.
- thang
- Offline
- Elite Member
-
Less
More
- Posts: 196
- Thank you received: 11
28 Dec 2019 02:54 #153352
by thang
Replied by thang on topic Mesa stepgen motion profile and joint following error.
i thought there is an motion interpolation in mesa card that slow down accel, maybe large following error happens because my acceleration was so high and physic limit does not allow it.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5282
28 Dec 2019 03:13 - 28 Dec 2019 03:13 #153354
by PCW
Replied by PCW on topic Mesa stepgen motion profile and joint following error.
If you are open loop then you should not get a following error unless the stepgen
acceleration and velocity limits do not have enough headroom vs your machine limits.
If the feedback is from encoders or the drive then it looks like your drive has some filtering
or jerk limiting applied.
The main ferror in your plot however is the velocity dependent error and this is likely caused
by a setup error in your hal file.
acceleration and velocity limits do not have enough headroom vs your machine limits.
If the feedback is from encoders or the drive then it looks like your drive has some filtering
or jerk limiting applied.
The main ferror in your plot however is the velocity dependent error and this is likely caused
by a setup error in your hal file.
Last edit: 28 Dec 2019 03:13 by PCW.
Please Log in or Create an account to join the conversation.
Time to create page: 0.248 seconds