How flexible is the MESA RS422 Encoder interface?
- Aciera
-
 Topic Author
Topic Author
- Away
- Administrator
-

Less
More
- Posts: 4767
- Thank you received: 2138
08 Jan 2020 09:07 - 08 Jan 2020 13:37 #154292
by Aciera
How flexible is the MESA RS422 Encoder interface? was created by Aciera
I'm still looking to get my 4-wire RS422 Mitsubishi Robot encoders to interface with LinuxCNC.
So I have a complementary (differential) pair for the request to and another differential pair for the data from the encoder: Scope printout shows only one wire of each differential pair. Request to encoder MR blue, Data from encoder MD red)
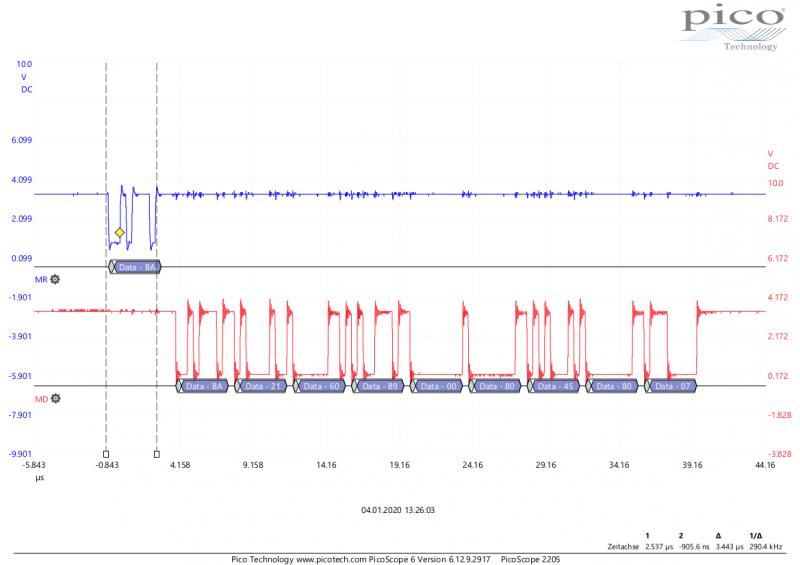
I know the commands to request the data (1 byte: here hexBA) The actual position data is in 3 bytes whithin a 9 byte answer. The communication runs at 2.5Mbaud and requests seem to have to be sent every 222us (+-1us)
Now my question:
Some MESA cards (e.g. 7i85) have RS422 inputs for encoders. The way I understand it, each has two differential inputs (4-wire) and would thus physically be compatible with my encoders. The Hostmot2 HAL driver has an SSI interface that seems to be configurable (to some degree).
Would it be possible to send a command over RS422 and extract the data from the answer?
My apologies if this is a really noob question.
dave
So I have a complementary (differential) pair for the request to and another differential pair for the data from the encoder: Scope printout shows only one wire of each differential pair. Request to encoder MR blue, Data from encoder MD red)
I know the commands to request the data (1 byte: here hexBA) The actual position data is in 3 bytes whithin a 9 byte answer. The communication runs at 2.5Mbaud and requests seem to have to be sent every 222us (+-1us)
Now my question:
Some MESA cards (e.g. 7i85) have RS422 inputs for encoders. The way I understand it, each has two differential inputs (4-wire) and would thus physically be compatible with my encoders. The Hostmot2 HAL driver has an SSI interface that seems to be configurable (to some degree).
Would it be possible to send a command over RS422 and extract the data from the answer?
My apologies if this is a really noob question.
dave
Attachments:
Last edit: 08 Jan 2020 13:37 by Aciera. Reason: wording, clarification
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19886
- Thank you received: 4645
09 Jan 2020 01:15 #154379
by andypugh
Replied by andypugh on topic How flexible is the MESA RS422 Encoder interface?
This is not a noob question, it is actually getting quite advanced.
Worst-case you might end up writing your own interface using the uart or bspi modules.
Worst-case you might end up writing your own interface using the uart or bspi modules.
Please Log in or Create an account to join the conversation.
- lrak
-

- Offline
- Premium Member
-

Less
More
- Posts: 114
- Thank you received: 22
30 Aug 2020 21:45 #180110
by lrak
Replied by lrak on topic How flexible is the MESA RS422 Encoder interface?
Originally, RS422 was for extending RS422, but the base interface is used for many things today, including encoders AND bidirectional communications
.
I would have guessed your 4 wire interface will be just A and B without an index, but if that is what you scope is showing - might be some kind of proprietary signaling (You will want the documentation - Some scales had absolute information on a secret protocol. Today, you are going to find almost everything is quadrature - unidirectional.).
The encoder inputs are going to be a one direction setup for receiving quadrature (A, B ) plusX(AKA index) from encoders. All the lines on the Mesa boards are going to be inputs, other than the 5V and GND. (SINO scales would have all three outputs - 6 wires + power and gnd + shield ).
I just made some schematic bit to make the adapter - sub-D to 10-pin
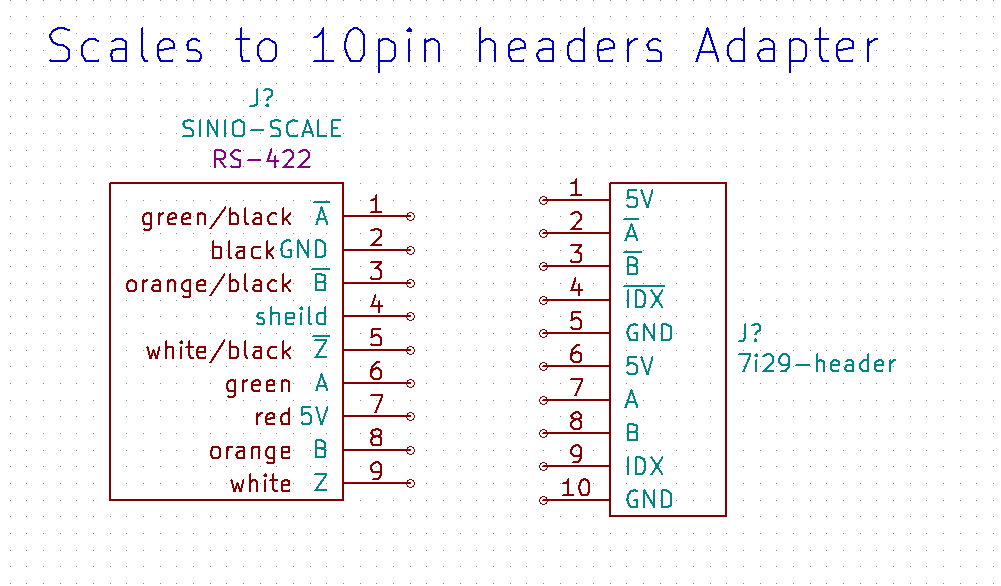
A couple of notes - the receiving end gets an opposing pair of signals - tie them together through a resistor and one gets a current that reverse direction. Common mode noise signals don't create this signal - IF both wires have the SAME noise imposed on them. This is important - the why the signal pairs should be using twisted pairs. (My quest right now is to find shielded + highly-stranded 4-twisted pairs - (not just stranded - motion control needs to flex - wants highly stranded wire (Even 20g has 60 strands)).
.
I would have guessed your 4 wire interface will be just A and B without an index, but if that is what you scope is showing - might be some kind of proprietary signaling (You will want the documentation - Some scales had absolute information on a secret protocol. Today, you are going to find almost everything is quadrature - unidirectional.).
The encoder inputs are going to be a one direction setup for receiving quadrature (A, B ) plusX(AKA index) from encoders. All the lines on the Mesa boards are going to be inputs, other than the 5V and GND. (SINO scales would have all three outputs - 6 wires + power and gnd + shield ).
I just made some schematic bit to make the adapter - sub-D to 10-pin
A couple of notes - the receiving end gets an opposing pair of signals - tie them together through a resistor and one gets a current that reverse direction. Common mode noise signals don't create this signal - IF both wires have the SAME noise imposed on them. This is important - the why the signal pairs should be using twisted pairs. (My quest right now is to find shielded + highly-stranded 4-twisted pairs - (not just stranded - motion control needs to flex - wants highly stranded wire (Even 20g has 60 strands)).
Attachments:
Please Log in or Create an account to join the conversation.
Time to create page: 0.120 seconds