LinuxCNC hardware.
- Storen
- Offline
- New Member
-

Less
More
- Posts: 5
- Thank you received: 0
11 Jul 2020 15:07 - 11 Jul 2020 15:10 #174307
by Storen
LinuxCNC hardware. was created by Storen
Hi, I am planning on retrofitting a late with DMM motors with multi-turn absolute encoders -
Link
I am new to LinuxCNC so this would be a double challenge. The idea is to use the encoder's positional information to HOME the machine. I found that LinuxCNC supports that function with the HOME_ABSOLUTE_ENCODER configuration setting.
Could you please suggest what would be the right hardware for such setup (besides the motors and the drives)?
I am trying to avoid using a very old PC. There are some inexpensive industrial PCs with parallel ports - Link
What other hardware I would need between the parallel port and the servo-drive?
As an alternative, there are also the MESA PCI boards - Link
Which MESA board(s) I would need for connecting the absolute encoders?
Do you know any step-by-step guides with wiring diagrams for a similar setup - spindle control, two step/dir drives, and two homing absolute encoders?
I am new to LinuxCNC so this would be a double challenge. The idea is to use the encoder's positional information to HOME the machine. I found that LinuxCNC supports that function with the HOME_ABSOLUTE_ENCODER configuration setting.
Could you please suggest what would be the right hardware for such setup (besides the motors and the drives)?
I am trying to avoid using a very old PC. There are some inexpensive industrial PCs with parallel ports - Link
What other hardware I would need between the parallel port and the servo-drive?
As an alternative, there are also the MESA PCI boards - Link
Which MESA board(s) I would need for connecting the absolute encoders?
Do you know any step-by-step guides with wiring diagrams for a similar setup - spindle control, two step/dir drives, and two homing absolute encoders?
Last edit: 11 Jul 2020 15:10 by Storen.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17999
- Thank you received: 5285
11 Jul 2020 16:55 #174313
by PCW
Replied by PCW on topic LinuxCNC hardware.
What type of absolute encoder interface does the drive provide to the controller?
Please Log in or Create an account to join the conversation.
- Storen
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 0
11 Jul 2020 19:45 - 11 Jul 2020 19:47 #174321
by Storen
Replied by Storen on topic LinuxCNC hardware.
This is the information I found in the manual:
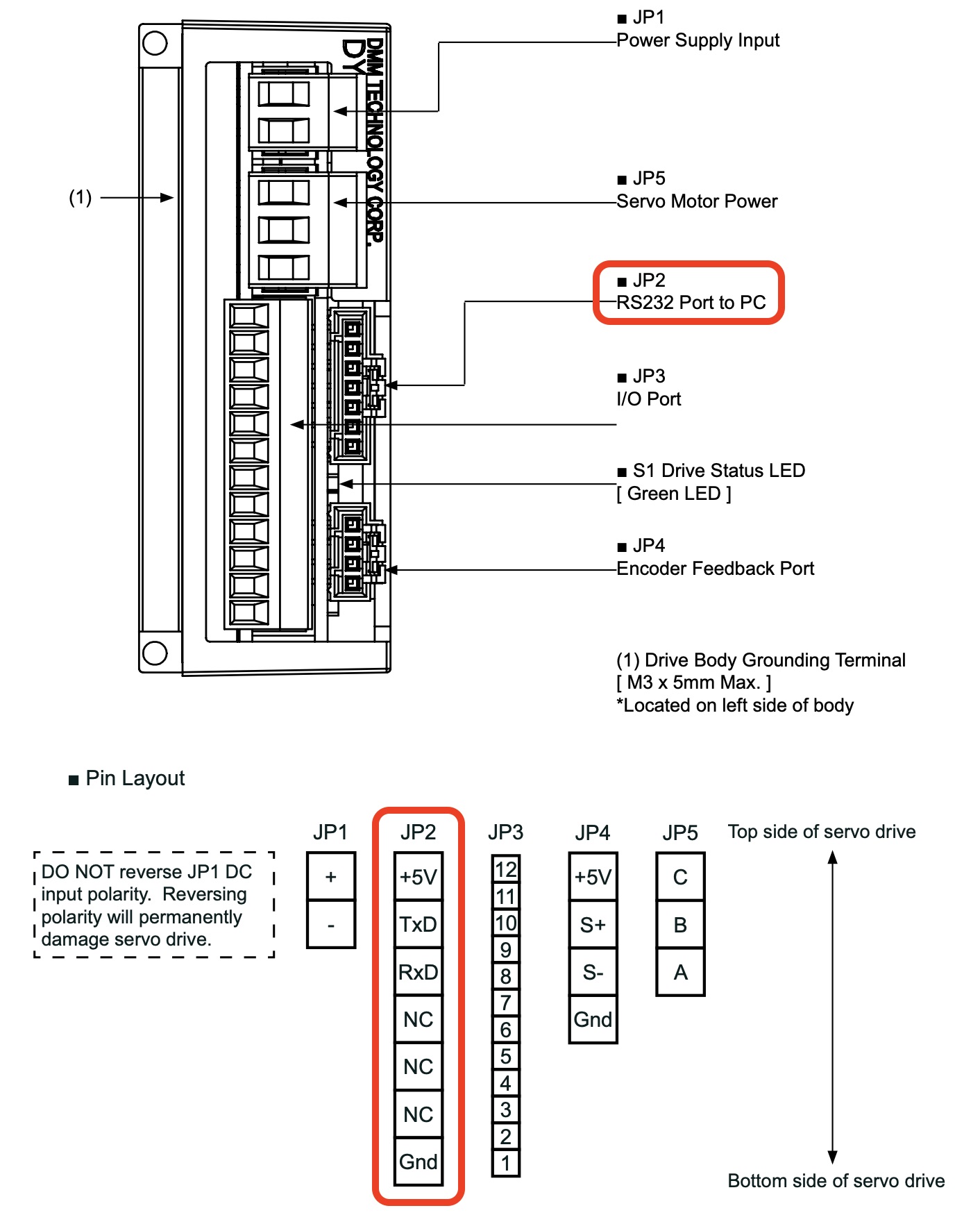
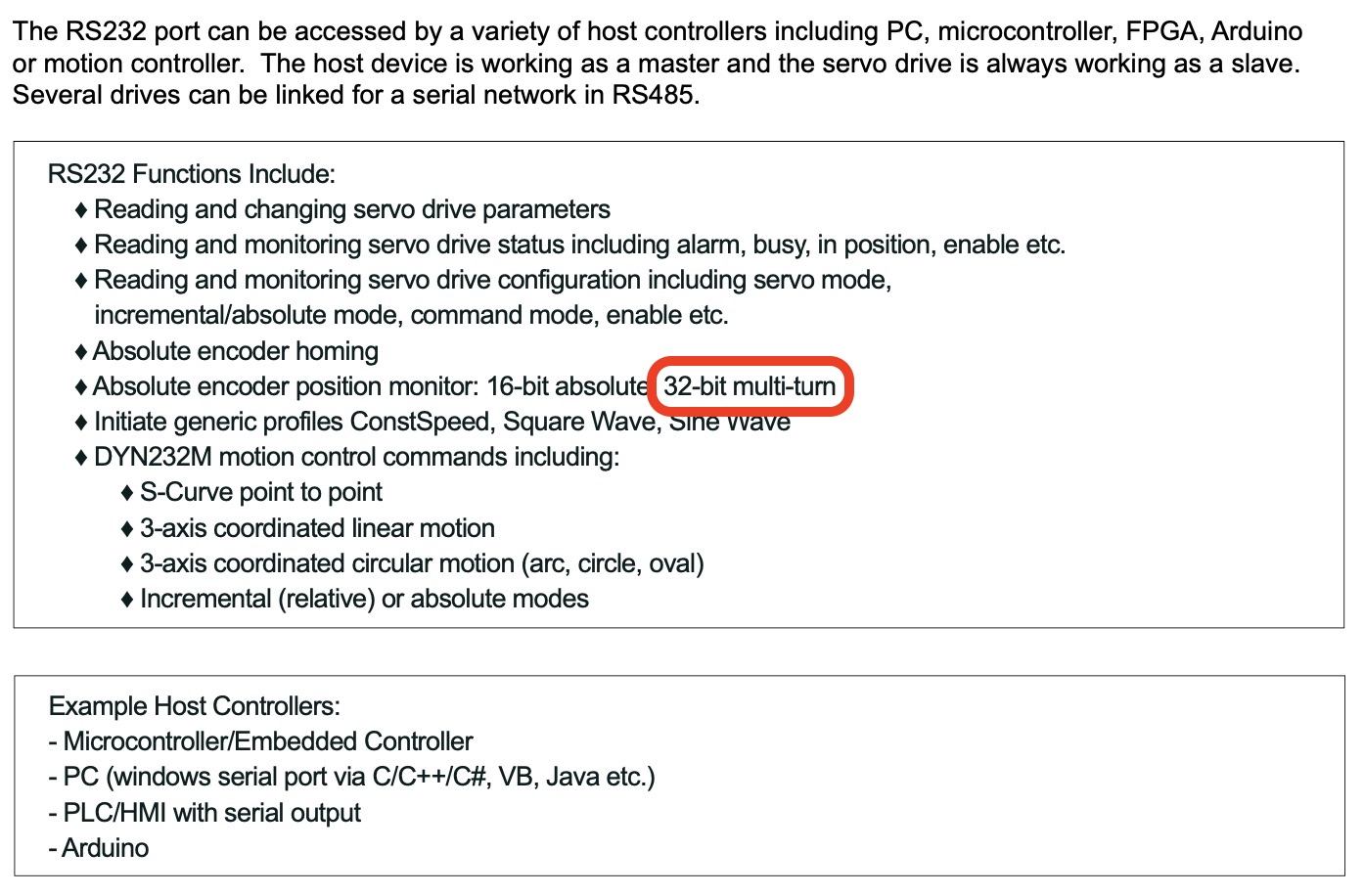
I am also attaching the manual - DYN2MS-14F-0917A18.pdf
I am also attaching the manual - DYN2MS-14F-0917A18.pdf
Last edit: 11 Jul 2020 19:47 by Storen.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17999
- Thank you received: 5285
11 Jul 2020 20:44 - 11 Jul 2020 20:45 #174329
by PCW
Replied by PCW on topic LinuxCNC hardware.
The drive does not provide any position feedback to LinuxCNC (other than via the RS-232 port)
so it looks like a fair project to make use of the absolute encoders for homing
so it looks like a fair project to make use of the absolute encoders for homing
Last edit: 11 Jul 2020 20:45 by PCW.
Please Log in or Create an account to join the conversation.
- Storen
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 0
11 Jul 2020 21:31 - 11 Jul 2020 21:32 #174332
by Storen
Replied by Storen on topic LinuxCNC hardware.
I am not sure I understand.
Isn't that the purpose of the RS-232 port?The drive does not provide any position feedback to LinuxCNC
Last edit: 11 Jul 2020 21:32 by Storen.
Please Log in or Create an account to join the conversation.
- arvidb
-

- Offline
- Platinum Member
-

Less
More
- Posts: 459
- Thank you received: 158
12 Jul 2020 12:59 #174382
by arvidb
Replied by arvidb on topic LinuxCNC hardware.
That drive doesn't seem to have any interface for neither control nor feedback that will work with LinuxCNC?
The feedback port seems to be some kind of serial interface (S+, S-) and there doesn't seem to be any step/dir nor +/-10 V control input either (unless through the IO port JP3?).
Does the drive support position or velocity control through the serial port? Regardless, I'm not sure that is supported by LinuxCNC.
The feedback port seems to be some kind of serial interface (S+, S-) and there doesn't seem to be any step/dir nor +/-10 V control input either (unless through the IO port JP3?).
Does the drive support position or velocity control through the serial port? Regardless, I'm not sure that is supported by LinuxCNC.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
Less
More
- Posts: 21768
- Thank you received: 7440
12 Jul 2020 14:44 #174391
by tommylight
Replied by tommylight on topic LinuxCNC hardware.
The drive has inputs for step/dir/cw/ccw/quadrature and analogue +-10V, so yes it can be used with LinuxCNC by using any of those types of control with a parallel port or Mesa anything I/O cards or mesa 7i96 or 7i76/7i76E, all that as open loop so the loop is closed only in the drive, not in LinuxCNC. All this does not require adding or changing anything.
It can also be used with the analogue controls with a Mesa 7i77, but would require adding linear scales to the machine for closing the loop in LinuxCNC, as the drives do not provide any kind of feedback to the controller or LinuxCNC, besides the "on position" signal that is for this use useless.
It can also be used with the analogue controls with a Mesa 7i77, but would require adding linear scales to the machine for closing the loop in LinuxCNC, as the drives do not provide any kind of feedback to the controller or LinuxCNC, besides the "on position" signal that is for this use useless.
The following user(s) said Thank You: arvidb
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21768
- Thank you received: 7440
12 Jul 2020 14:46 #174392
by tommylight
Replied by tommylight on topic LinuxCNC hardware.
From the manual:
Pin 10: Absolute Zero Position Index Output
Might be able to use that for homing, it sure looks like it is for that exact thing.
Pin 10: Absolute Zero Position Index Output
Might be able to use that for homing, it sure looks like it is for that exact thing.
Please Log in or Create an account to join the conversation.
- Storen
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 0
12 Jul 2020 15:37 #174400
by Storen
Replied by Storen on topic LinuxCNC hardware.
Thank you all for the replies! So it seems there is light at the end of the tunnel.
@tommylight:
Is there any advantage of using the Mesa cards instead of connecting directly to the parallel port for this particular project?
I always assumed the Closed-loop will be in the drive. Would there be any advantage of doing it in LinuxCNC?
Since this is just one pin I am guessing that the HOME positions for both axises have to be set in the drives and not in LinuxCNC. The signal to Pin-10 will tell the drives to move the motors to zero (Home). I'll confirm that with DMM.
If that is the case, can LinuxCNC be configured to send such a signal for Homing?
@tommylight:
Is there any advantage of using the Mesa cards instead of connecting directly to the parallel port for this particular project?
I always assumed the Closed-loop will be in the drive. Would there be any advantage of doing it in LinuxCNC?
Since this is just one pin I am guessing that the HOME positions for both axises have to be set in the drives and not in LinuxCNC. The signal to Pin-10 will tell the drives to move the motors to zero (Home). I'll confirm that with DMM.
If that is the case, can LinuxCNC be configured to send such a signal for Homing?
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21768
- Thank you received: 7440
12 Jul 2020 16:13 #174401
by tommylight
Still, you should be able to make them work with Parallel port easily and see if the speed you can achieve is sufficient for what you need.
You can upgrade to Mesa at any later time with minimal or no changes to the existing system.
The benefits are that LinuxCNC knows where the machine is at all times, even after power down, if set up properly. Will error on lost position for whatever reason, if machine stalls of drives fail, etc. Also makes it possible to disable the drives and move the machine by hand while LinuxCNC will know where and by how much the machine moved, but that is not an important feature.
And no, signal pin 10 is an output, so it can be used to signal LinuxCNC on an input that the axis is at home position.
Replied by tommylight on topic LinuxCNC hardware.
Plenty of it, from much, much faster step rates to plenty of IO and expandability. And they do have the best support on planet earth, complements of PCW, a very active member of this forum.Is there any advantage of using the Mesa cards instead of connecting directly to the parallel port for this particular project?
Still, you should be able to make them work with Parallel port easily and see if the speed you can achieve is sufficient for what you need.
You can upgrade to Mesa at any later time with minimal or no changes to the existing system.
LinuxCNC is a machine controller, so i like giving it full control, hence i like to have the loop closed also in LinuxCNC.I always assumed the Closed-loop will be in the drive. Would there be any advantage of doing it in LinuxCNC?
The benefits are that LinuxCNC knows where the machine is at all times, even after power down, if set up properly. Will error on lost position for whatever reason, if machine stalls of drives fail, etc. Also makes it possible to disable the drives and move the machine by hand while LinuxCNC will know where and by how much the machine moved, but that is not an important feature.
Yes the home position will have to be set in the drives.Since this is just one pin I am guessing that the HOME positions for both axises have to be set in the drives and not in LinuxCNC. The signal to Pin-10 will tell the drives to move the motors to zero (Home).
And no, signal pin 10 is an output, so it can be used to signal LinuxCNC on an input that the axis is at home position.
Please Log in or Create an account to join the conversation.
Time to create page: 0.138 seconds