Yaskawa SGD7S drives cant get to work with 7i76
- bevins
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1947
- Thank you received: 338
27 Jul 2020 15:07 - 27 Jul 2020 15:10 #176082
by bevins
Yaskawa SGD7S drives cant get to work with 7i76 was created by bevins
Has anyone worked with these drives?
It is not moving at all. Initial powerup.
I can see pulses output in hal config.
linux mint 18.3, linuxcnc 2.9 pre
HAL
INI

It is not moving at all. Initial powerup.
I can see pulses output in hal config.
linux mint 18.3, linuxcnc 2.9 pre
HAL
Warning: Spoiler!
# Generated by PNCconf at Sun Jul 26 08:44:12 2020
# Using LinuxCNC version: UNAVAILABLE
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="10.10.10.10" config=" num_encoders=1 num_pwmgens=0 num_stepgens=3 sserial_port_0=200xxx"
setp hm2_7i92.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_7i92.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_7i92.0.write servo-thread
setp hm2_7i92.0.dpll.01.timer-us -50
setp hm2_7i92.0.stepgen.timer-number 1
# external output signals
# external input signals
###################################################
# --- BOTH-X ---
#net both-x <= hm2_7i92.0.7i76.0.0.input-01
# --- BOTH-Y ---
#net both-y <= hm2_7i92.0.7i76.0.0.input-02
# --- BOTH-Z ---
# both-z <= hm2_7i92.0.7i76.0.0.input-03
# --- HOME-X ---
#net home-x <= hm2_7i92.0.7i76.0.0.input-04
# --- HOME-Y ---
#net home-y <= hm2_7i92.0.7i76.0.0.input-05
# --- HOME-Z ---
#net home-z <= hm2_7i92.0.7i76.0.0.input-06
###################################################
# --- HOME-X ---
net home-x <= hm2_7i92.0.7i76.0.0.input-01
# --- HOME-Y ---
net home-y <= hm2_7i92.0.7i76.0.0.input-02
# --- HOME-Z ---
net home-z <= hm2_7i92.0.7i76.0.0.input-03
# --- MIN-X ---
net min-x <= hm2_7i92.0.7i76.0.0.input-04
# --- MAX-X ---
net max-x <= hm2_7i92.0.7i76.0.0.input-05
# --- MIN-Y ---
net min-y <= hm2_7i92.0.7i76.0.0.input-06
# --- MAX-Y ---
net max-y <= hm2_7i92.0.7i76.0.0.input-07
# --- MIN-Z ---
net min-z <= hm2_7i92.0.7i76.0.0.input-08
# --- MAX-Z ---
net max-z <= hm2_7i92.0.7i76.0.0.input-09
###################################################
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
setp pid.x.maxerror .0005
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i92.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_7i92.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_7i92.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_7i92.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i92.0.stepgen.00.step_type 0
setp hm2_7i92.0.stepgen.00.control-type 1
setp hm2_7i92.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output <= hm2_7i92.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i92.0.stepgen.00.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i92.0.stepgen.00.enable
# ---setup home / limit switch signals---
net home-x => joint.0.home-sw-in
#net both-x => joint.0.neg-lim-sw-in
#net both-x => joint.0.pos-lim-sw-in
net min-x => joint.0.neg-lim-sw-in
net max-x => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
setp pid.y.maxerror .0005
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp hm2_7i92.0.stepgen.01.dirhold [JOINT_1]DIRHOLD
setp hm2_7i92.0.stepgen.01.steplen [JOINT_1]STEPLEN
setp hm2_7i92.0.stepgen.01.stepspace [JOINT_1]STEPSPACE
setp hm2_7i92.0.stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp hm2_7i92.0.stepgen.01.step_type 0
setp hm2_7i92.0.stepgen.01.control-type 1
setp hm2_7i92.0.stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-output <= hm2_7i92.0.stepgen.01.velocity-cmd
net y-pos-fb <= hm2_7i92.0.stepgen.01.position-fb
net y-pos-fb => joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
net y-enable => hm2_7i92.0.stepgen.01.enable
# ---setup home / limit switch signals---
net home-y => joint.1.home-sw-in
net min-y => joint.1.neg-lim-sw-in
net max-y => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
setp pid.z.maxerror .0005
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp hm2_7i92.0.stepgen.02.dirhold [JOINT_2]DIRHOLD
setp hm2_7i92.0.stepgen.02.steplen [JOINT_2]STEPLEN
setp hm2_7i92.0.stepgen.02.stepspace [JOINT_2]STEPSPACE
setp hm2_7i92.0.stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp hm2_7i92.0.stepgen.02.step_type 0
setp hm2_7i92.0.stepgen.02.control-type 1
setp hm2_7i92.0.stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-vel-cmd <= joint.2.vel-cmd
net z-output <= hm2_7i92.0.stepgen.02.velocity-cmd
net z-pos-fb <= hm2_7i92.0.stepgen.02.position-fb
net z-pos-fb => joint.2.motor-pos-fb
net z-enable <= joint.2.amp-enable-out
net z-enable => hm2_7i92.0.stepgen.02.enable
# ---setup home / limit switch signals---
net home-z => joint.2.home-sw-in
net min-z => joint.2.neg-lim-sw-in
net max-z => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm => pid.s.command
net spindle-vel-fb-rpm => pid.s.feedback
net spindle-output <= pid.s.output
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
#net coolant-mist <= iocontrol.0.coolant-mist
#net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
#net estop-out <= iocontrol.0.user-enable-out
#net estop-out => iocontrol.0.emc-enable-in
loadrt estop_latch
addf estop-latch.0 servo-thread
net estop-loopout iocontrol.0.emc-enable-in <= estop-latch.0.ok-out
net estop-loopin iocontrol.0.user-enable-out => estop-latch.0.ok-in
net estop-reset iocontrol.0.user-request-enable => estop-latch.0.reset
net remote-estop estop-latch.0.fault-in <= hm2_7i92.0.7i76.0.0.input-00-not
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
INI
Warning: Spoiler!
# Generated by PNCconf at Sun Jul 26 08:44:12 2020
# Using LinuxCNC version: UNAVAILABLE
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
[EMC]
MACHINE = ET1
DEBUG = 0
VERSION = 1.1
[DISPLAY]
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_OVERRIDE = 1.000000
MIN_SPINDLE_OVERRIDE = 0.500000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/etienne/linuxcnc/nc_files
INCREMENTS = .1in .05in .01in .005in .001in .0005in .0001in
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 0.250000
MAX_LINEAR_VELOCITY = 1.000000
MIN_LINEAR_VELOCITY = 0.016670
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
SERVO_PERIOD = 1000000
[HMOT]
# **** This is for info only ****
CARD0=hm2_7i92.0
[HAL]
HALUI = halui
HALFILE = ET1.hal
HALFILE = custom.hal
POSTGUI_HALFILE = postgui_call_list.hal
SHUTDOWN = shutdown.hal
[HALUI]
[KINS]
JOINTS = 3
KINEMATICS = trivkins coordinates=XYZ
[TRAJ]
COORDINATES = XYZ
LINEAR_UNITS = inch
ANGULAR_UNITS = degree
DEFAULT_LINEAR_VELOCITY = 0.10
MAX_LINEAR_VELOCITY = 1.00
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
#******************************************
[AXIS_X]
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
MIN_LIMIT = -0.001
MAX_LIMIT = 8.0
[JOINT_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 1.25
STEPGEN_MAXACCEL = 37.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -0.001
MAX_LIMIT = 8.0
HOME_OFFSET = 0.000000
HOME_SEARCH_VEL = -0.050000
HOME_LATCH_VEL = -0.016667
HOME_FINAL_VEL = 0.000000
HOME_USE_INDEX = NO
HOME_SEQUENCE = 1
#******************************************
#******************************************
[AXIS_Y]
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
MIN_LIMIT = -0.001
MAX_LIMIT = 8.0
[JOINT_1]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 1.25
STEPGEN_MAXACCEL = 37.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -0.001
MAX_LIMIT = 8.0
HOME_OFFSET = 0.000000
HOME_SEARCH_VEL = -0.050000
HOME_LATCH_VEL = -0.016667
HOME_FINAL_VEL = 0.000000
HOME_USE_INDEX = NO
HOME_SEQUENCE = 2
#******************************************
#******************************************
[AXIS_Z]
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
MIN_LIMIT = -4.0
MAX_LIMIT = 0.001
[JOINT_2]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 1.25
STEPGEN_MAXACCEL = 37.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -4.0
MAX_LIMIT = 0.001
HOME_OFFSET = 0.000000
HOME_SEARCH_VEL = -0.050000
HOME_LATCH_VEL = -0.016667
HOME_FINAL_VEL = 0.000000
HOME_USE_INDEX = NO
HOME_SEQUENCE = 0
#******************************************
[SPINDLE_0]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 2000
Attachments:
Last edit: 27 Jul 2020 15:10 by bevins.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
27 Jul 2020 15:11 #176085
by bevins
Replied by bevins on topic Yaskawa SGD7S drives cant get to work with 7i76
It looks like it is not connected to correct TB2 on 7i76 but I assure you it is.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
27 Jul 2020 15:31 #176089
by bevins
Replied by bevins on topic Yaskawa SGD7S drives cant get to work with 7i76
Sorry, McStupid here.
Scale was too small. Fixed er up. She moves now....
Scale was too small. Fixed er up. She moves now....
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21764
- Thank you received: 7438
27 Jul 2020 16:02 #176095
by tommylight
Replied by tommylight on topic Yaskawa SGD7S drives cant get to work with 7i76
Was just looking at it, thinking:
This is Bevins, he can tune and set up chinesium stuff easily, and these are Yaskawa, they must be broken !")
This is Bevins, he can tune and set up chinesium stuff easily, and these are Yaskawa, they must be broken !
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
27 Jul 2020 17:11 #176099
by bevins
yeah.... I have done a ton of +-10 analog servos, but this is my 2nd step/dir servos. I dont quite gots da handle on the steps yet. (pun intended).
Replied by bevins on topic Yaskawa SGD7S drives cant get to work with 7i76
Was just looking at it, thinking:
This is Bevins, he can tune and set up chinesium stuff easily, and these are Yaskawa, they must be broken !
yeah.... I have done a ton of +-10 analog servos, but this is my 2nd step/dir servos. I dont quite gots da handle on the steps yet. (pun intended).
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
27 Jul 2020 17:14 #176102
by bevins
Replied by bevins on topic Yaskawa SGD7S drives cant get to work with 7i76
I have all the axis moving and all I/O except spindle stuff and ATC.
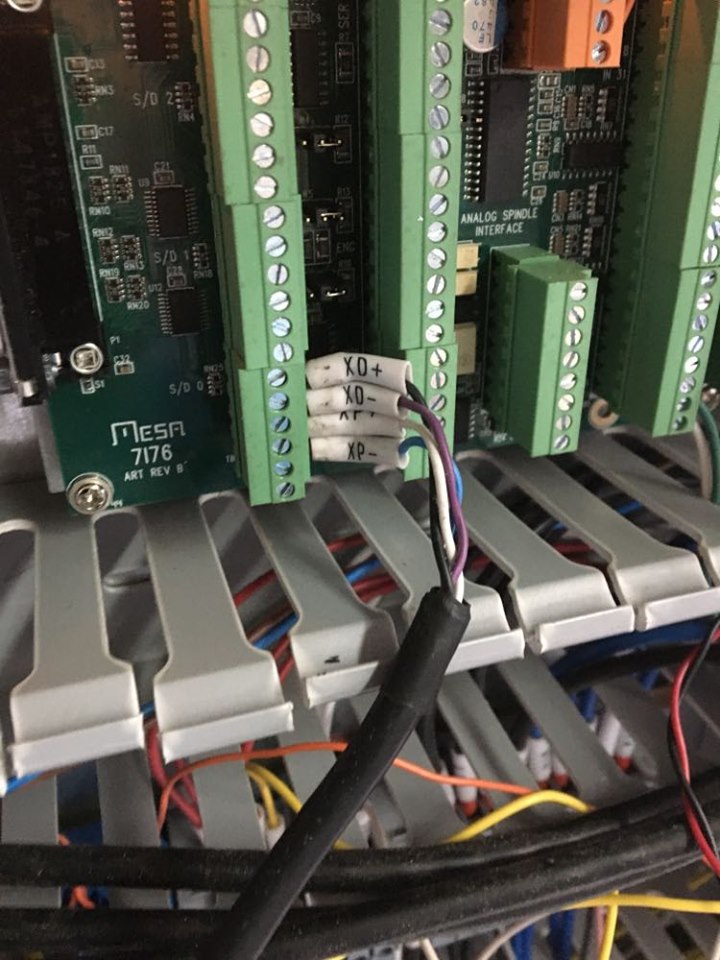
Chineese: Have to rewire all the home and limit switches. They put them all N/O. WTF ???
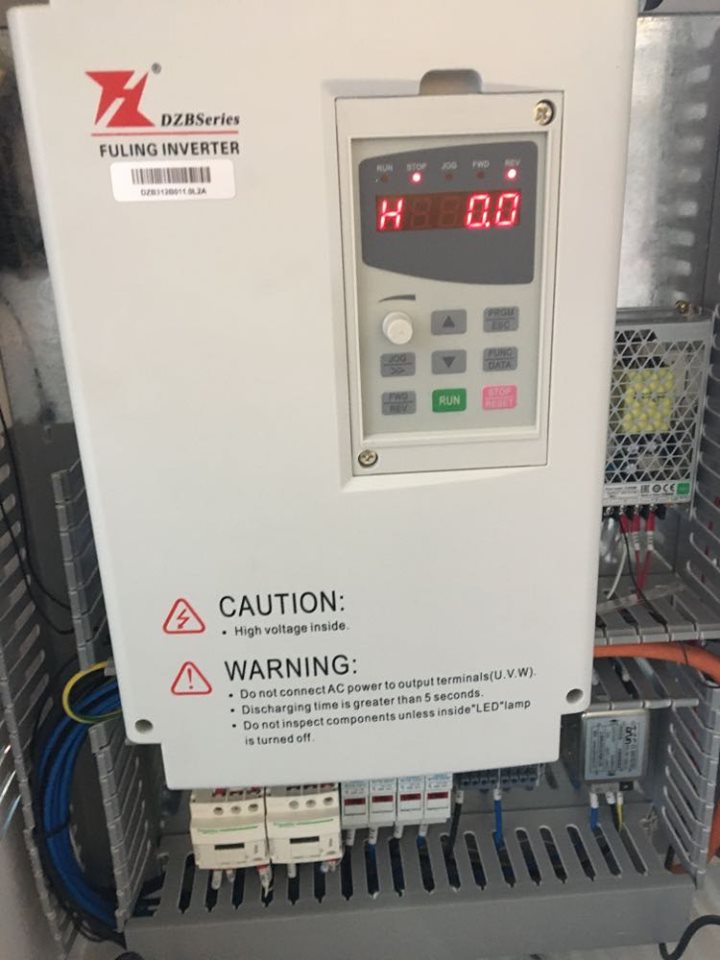
Have to tackle Chioneese spindle/driver next... ITs a Fuling Inverter DBX series. and I dont have a manual. ARGGGG....
Chineese: Have to rewire all the home and limit switches. They put them all N/O. WTF ???
Have to tackle Chioneese spindle/driver next... ITs a Fuling Inverter DBX series. and I dont have a manual. ARGGGG....
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21764
- Thank you received: 7438
27 Jul 2020 17:26 #176103
by tommylight
Replied by tommylight on topic Yaskawa SGD7S drives cant get to work with 7i76
Get us some picture of the spindle/drive, maybe we can extract some info from it.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
27 Jul 2020 18:31 #176115
by bevins
Replied by bevins on topic Yaskawa SGD7S drives cant get to work with 7i76
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1947
- Thank you received: 338
27 Jul 2020 18:32 - 27 Jul 2020 18:46 #176117
by bevins
Replied by bevins on topic Yaskawa SGD7S drives cant get to work with 7i76
I have prox switches on the Z that gives me a ground when tripped. How do I connect that to a 7i76? pull ups?
2K pullup to 24v should do the trick?
2K pullup to 24v should do the trick?
Last edit: 27 Jul 2020 18:46 by bevins.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21764
- Thank you received: 7438
27 Jul 2020 18:47 #176124
by tommylight
And i can not make out the numbers on the bar code. Did you try to search for that? or if there is an FCC number search for that too.
Replied by tommylight on topic Yaskawa SGD7S drives cant get to work with 7i76
Pull ups, so the input would have to be inverted in hal, or it might not need to.I have prox switches on the Z that gives me a ground when tripped. How do I connect that to a 7i76? pull downs?
And i can not make out the numbers on the bar code. Did you try to search for that? or if there is an FCC number search for that too.
Please Log in or Create an account to join the conversation.
Time to create page: 0.145 seconds