Using a rotary encoder with a p/port
- Clive S
- Offline
- Platinum Member
-

Less
More
- Posts: 2204
- Thank you received: 486
11 Aug 2020 17:32 #177912
by Clive S
Using a rotary encoder with a p/port was created by Clive S
Ok I am retro fitting a small lathe using a p/port.
Q. will a 600p/rev single ended A+B+Z rotary encoder be too fast for a Chinese bob and what scale would be needed?
Would that count at 600 or 2400?
Q. will a 600p/rev single ended A+B+Z rotary encoder be too fast for a Chinese bob and what scale would be needed?
Would that count at 600 or 2400?
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21764
- Thank you received: 7438
11 Aug 2020 19:06 #177925
by tommylight
Replied by tommylight on topic Using a rotary encoder with a p/port
Use the older RTAI kernel for better latency and hence faster read rate of the encoder.
Even with a very good latency, the speed will be very limited with a 600PPR encoder, but might be able to get it from 1800 to 2400 rpm still. If you are lucky on the latency side, it can go to 5000, but i would leave a fair bit of margin under it.
That would count as 2400 in LinuxCNC, but will count as 600 times RPM divided by 60 for the pulse frequency.
To get an idea, here are some latency figures and the corresponding frequency that the parallel port can count:
Latency
set in ini file >>>>>>>>>frequency >>>>>>>> motor RPM with 600 PPR encoder
20000 >>>>>>>>>>>> 50KHz >>>>>>>>>> 5000RPM
50000 >>>>>>>>>>>> 20KHz >>>>>>>>>> 2000RPM
100000 >>>>>>>>>>> 10KHz >>>>>>>>>> 1000RPM
Even with a very good latency, the speed will be very limited with a 600PPR encoder, but might be able to get it from 1800 to 2400 rpm still. If you are lucky on the latency side, it can go to 5000, but i would leave a fair bit of margin under it.
That would count as 2400 in LinuxCNC, but will count as 600 times RPM divided by 60 for the pulse frequency.
To get an idea, here are some latency figures and the corresponding frequency that the parallel port can count:
Latency
set in ini file >>>>>>>>>frequency >>>>>>>> motor RPM with 600 PPR encoder
20000 >>>>>>>>>>>> 50KHz >>>>>>>>>> 5000RPM
50000 >>>>>>>>>>>> 20KHz >>>>>>>>>> 2000RPM
100000 >>>>>>>>>>> 10KHz >>>>>>>>>> 1000RPM
The following user(s) said Thank You: Clive S
Please Log in or Create an account to join the conversation.
- Clive S
- Offline
- Platinum Member
-
Less
More
- Posts: 2204
- Thank you received: 486
11 Aug 2020 19:16 #177929
by Clive S
Replied by Clive S on topic Using a rotary encoder with a p/port
Yes I have used a a 60 pulse counter before with good results I might try and get a200 pulse the rev.
This would mainly be used for threading and probably never get above 600rpm
This would mainly be used for threading and probably never get above 600rpm
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21764
- Thank you received: 7438
11 Aug 2020 19:41 #177932
by tommylight
Replied by tommylight on topic Using a rotary encoder with a p/port
Is it 60 or 600 ?
600 RPM should be doable with a nice margin even with a not so good latency.
Give it a try.
600 RPM should be doable with a nice margin even with a not so good latency.
Give it a try.
Please Log in or Create an account to join the conversation.
- Clive S
- Offline
- Platinum Member
-
Less
More
- Posts: 2204
- Thank you received: 486
11 Aug 2020 19:49 #177935
by Clive S
I will give it a go . I think I will have to put a filter on it if I can remember how to do it.
Replied by Clive S on topic Using a rotary encoder with a p/port
Yes it is 600 I have used 60 before with success for theading with just a slotted disk with 3 optos.Is it 60 or 600 ?
600 RPM should be doable with a nice margin even with a not so good latency.
Give it a try.
I will give it a go . I think I will have to put a filter on it if I can remember how to do it.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- Clive S
- Offline
- Platinum Member
-
Less
More
- Posts: 2204
- Thank you received: 486
21 Aug 2020 14:53 #178925
by Clive S
Replied by Clive S on topic Using a rotary encoder with a p/port
Update:
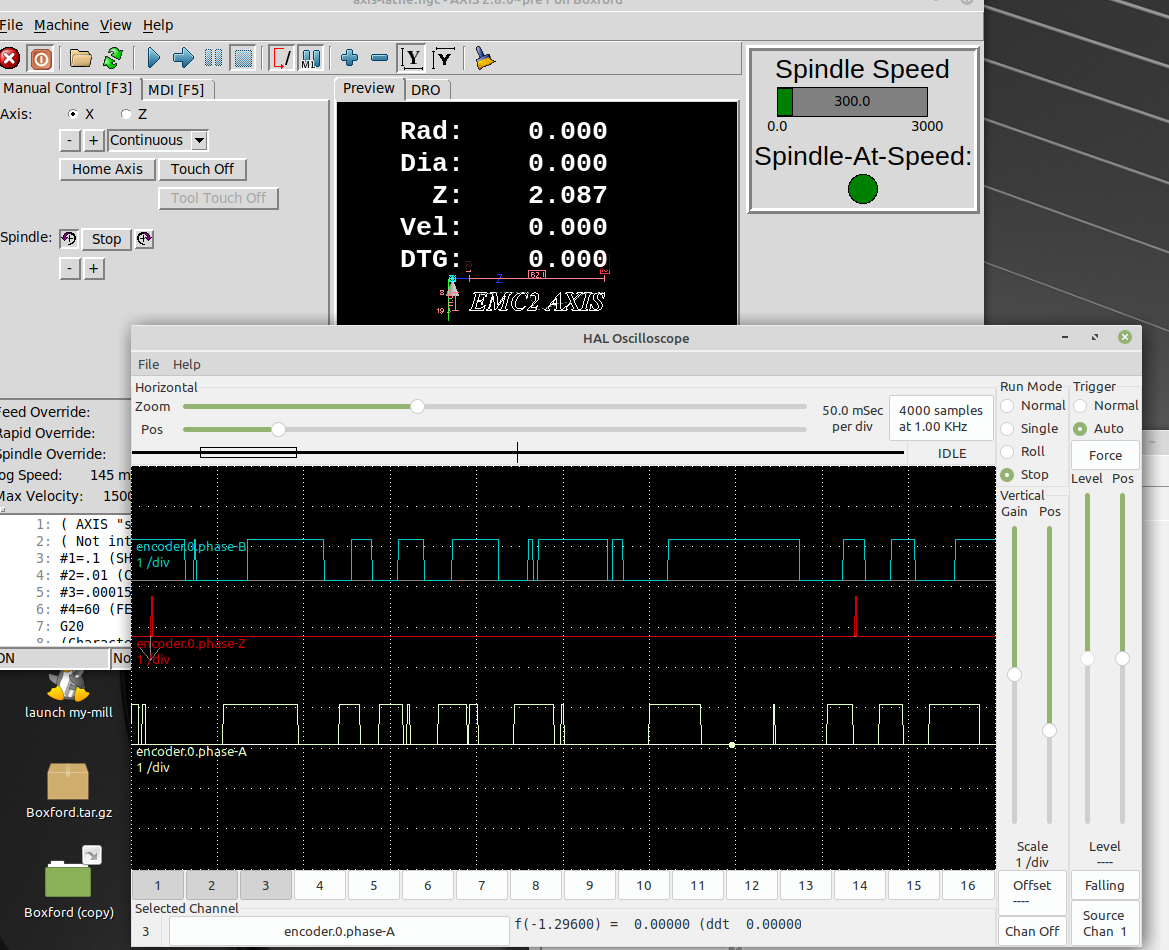
I am retrofitting a very small lathe Boxford with a Chinese simple bob. I have tried a 600 pulse/rev ABZ it's to fast for the P/port .
I have not tried a 200 P/rev single ended. It seems to count OK up to about 350 rpm I am not sure if it is missing the Z pulse the scale is set to 800 which seems to be correct tested with a rev counter.
Am I asking to much of the P/port with this ie. should I just put a simple 100 slot wheel with index slot.
I am retrofitting a very small lathe Boxford with a Chinese simple bob. I have tried a 600 pulse/rev ABZ it's to fast for the P/port .
I have not tried a 200 P/rev single ended. It seems to count OK up to about 350 rpm I am not sure if it is missing the Z pulse the scale is set to 800 which seems to be correct tested with a rev counter.
Am I asking to much of the P/port with this ie. should I just put a simple 100 slot wheel with index slot.
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21764
- Thank you received: 7438
21 Aug 2020 16:10 #178934
by tommylight
Replied by tommylight on topic Using a rotary encoder with a p/port
Set the base period in the ini file to 50000, that should get you twice the speed, but do check if you get latency warnings and if not, lower that a bit more.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5283
21 Aug 2020 16:23 - 21 Aug 2020 18:39 #178935
by PCW
Replied by PCW on topic Using a rotary encoder with a p/port
To get a better Halscope view, you should set it to sample the inputs at the base thread rate rather than the servo thread rate
Last edit: 21 Aug 2020 18:39 by PCW.
The following user(s) said Thank You: Clive S
Please Log in or Create an account to join the conversation.
- Clive S
- Offline
- Platinum Member
-
Less
More
- Posts: 2204
- Thank you received: 486
21 Aug 2020 17:10 #178943
by Clive S
Thanks.
screen shots
1500rpm speed with tachometer
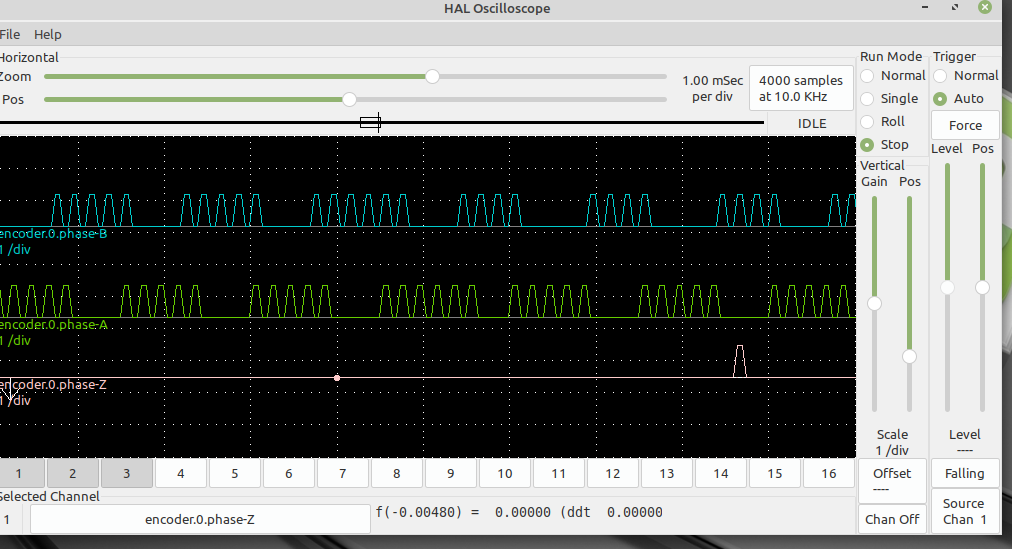
1000rpm
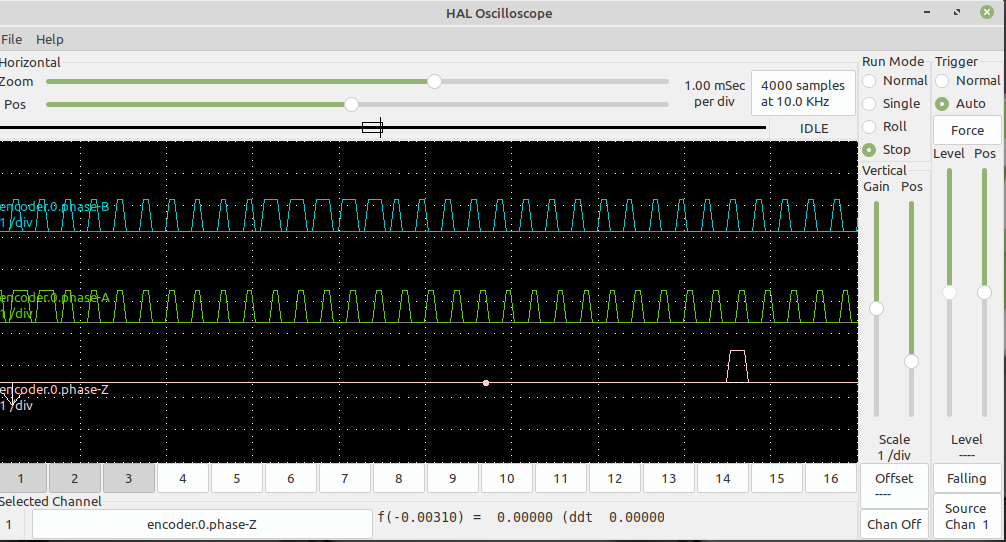
500rpm
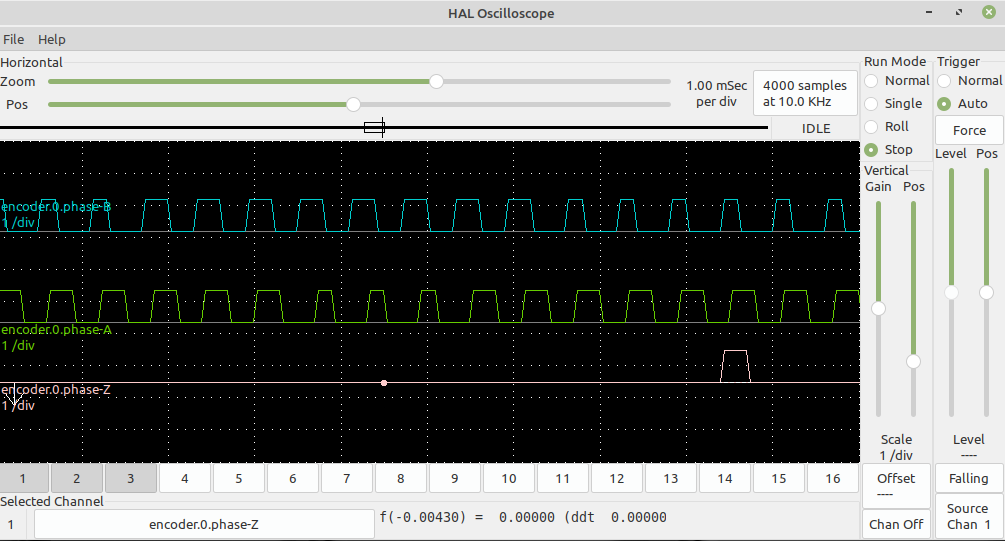
250 rpm
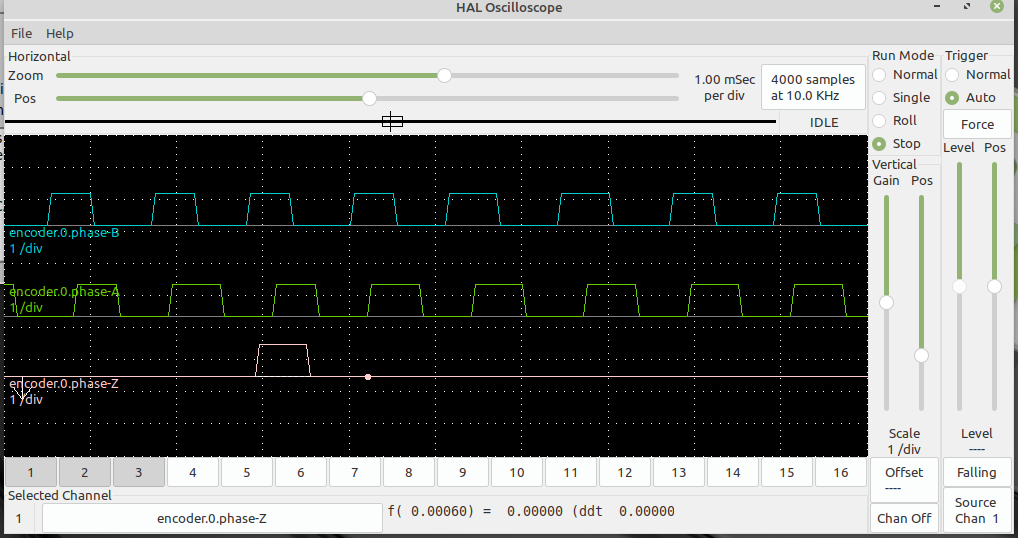
Would this encoder be suitable for threading. Would you have an idea of the speed it could count at?
The speed on the axis screen is OK up to about 400 then it loses its way.
Replied by Clive S on topic Using a rotary encoder with a p/port
To get a better Halscope view, you should set it sample the inputs at the base thread rate rather than the servo thread rate
Thanks.
screen shots
1500rpm speed with tachometer
1000rpm
500rpm
250 rpm
Would this encoder be suitable for threading. Would you have an idea of the speed it could count at?
The speed on the axis screen is OK up to about 400 then it loses its way.
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5283
21 Aug 2020 18:40 - 21 Aug 2020 19:01 #178949
by PCW
Replied by PCW on topic Using a rotary encoder with a p/port
Yeah, I would say up to 250 RPM or so would be a good speed with some safety margin.
One way of looking at this is by calculating how many times linuxCNC samples each quadrature state
At 800 counts = quadrature states per turn and 500 RPM there are an average of 1.5 samples per state at 10 KHz.
While this exceeds the theoretical absolute minimum of 1 sample per state, it doesn't leave much margin for quadrature
errors or LinuxCNCs base thread timing jitter. Many quadrature encoders specify a 90 degree +-45 degree
quadrature error which would mean you would need to double the minimum number of samples per state
(to 2 minimum) to get a reliable reading
With 800 counts per turn and 2 samples per quadrature state and 10 KHz sampling, this works out to a
maximum RPM of 375 RPM. If you include host sampling time jitter, the 250 RPM figure seems good
One way of looking at this is by calculating how many times linuxCNC samples each quadrature state
At 800 counts = quadrature states per turn and 500 RPM there are an average of 1.5 samples per state at 10 KHz.
While this exceeds the theoretical absolute minimum of 1 sample per state, it doesn't leave much margin for quadrature
errors or LinuxCNCs base thread timing jitter. Many quadrature encoders specify a 90 degree +-45 degree
quadrature error which would mean you would need to double the minimum number of samples per state
(to 2 minimum) to get a reliable reading
With 800 counts per turn and 2 samples per quadrature state and 10 KHz sampling, this works out to a
maximum RPM of 375 RPM. If you include host sampling time jitter, the 250 RPM figure seems good
Last edit: 21 Aug 2020 19:01 by PCW.
Please Log in or Create an account to join the conversation.
Time to create page: 0.240 seconds