tailstock removed when home is run
- RobotMatic
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

- Posts: 199
- Thank you received: 25
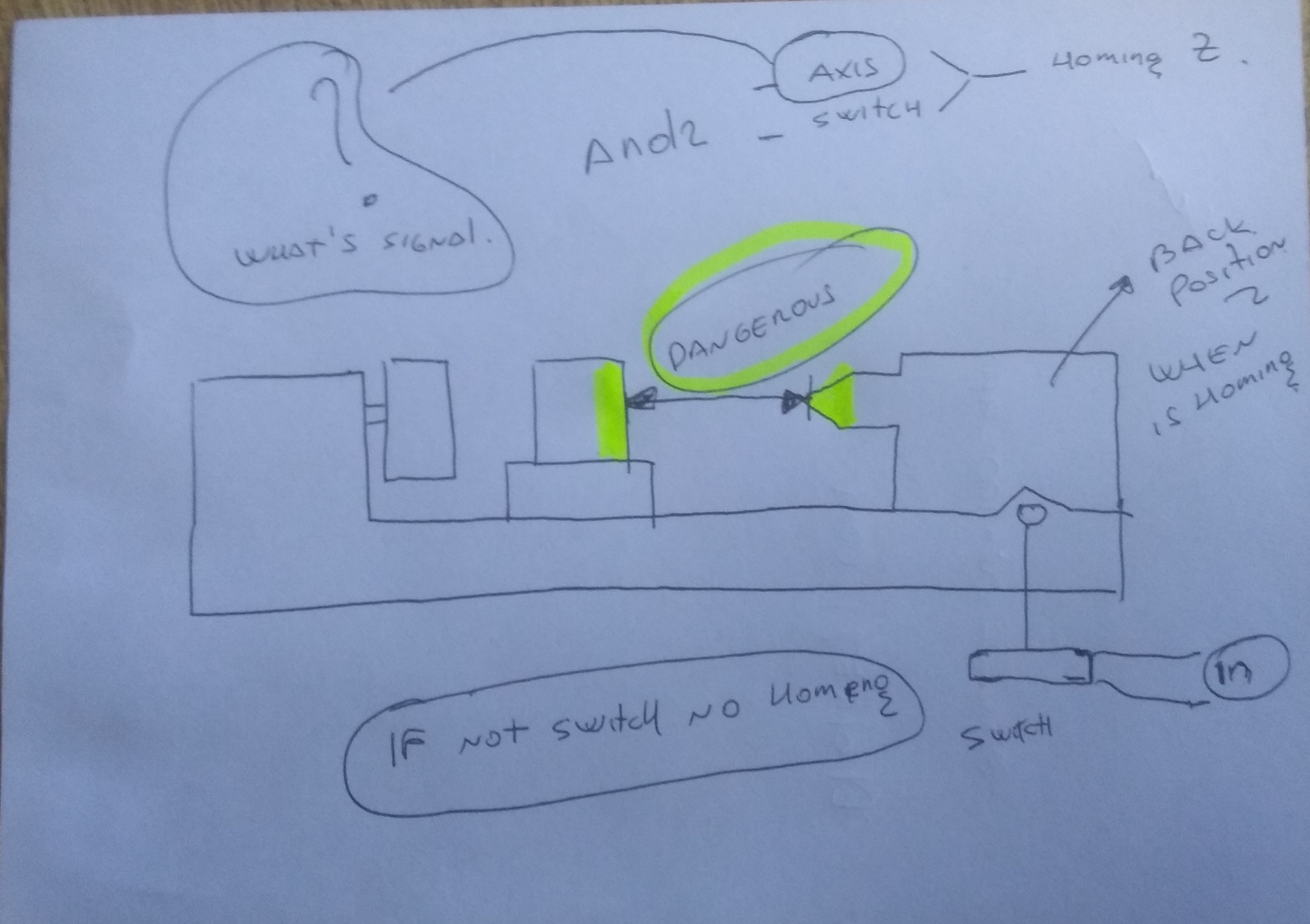
I can't find the signal in the (axis GUI) that starts in the home process for the z axis or for all the axes.
I can see ......homed
......homing
......unhome
I am looking for the signal that I can read to make an and2 and be able to stop the home process so that it does not take place when the switch is not depressed.
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Away
- Administrator
-

- Posts: 4767
- Thank you received: 2138
motion.homing−inhibit IN BIT
If this bit is TRUE, initiation of any joint homing move (including "Home All") is disallowed and an error is reported. By default, homing is allowed in joint mode whenever motion is enabled.
Please Log in or Create an account to join the conversation.
- RobotMatic
-
Topic Author
- Offline
- Elite Member
-
- Posts: 199
- Thank you received: 25
Please Log in or Create an account to join the conversation.
- Aciera
-
- Away
- Administrator
-
- Posts: 4767
- Thank you received: 2138
axis.N.homing OUT BIT
TRUE if the joint is currently homing
And use your signal for "tailstock present" to trigger an estop? Maybe coupled with a message on screen?
Or maybe
axis.N.amp−fault−in IN BIT
Should be driven TRUE if an external fault is detected with the amplifier for this joint
Not really sure what this does though.
Please Log in or Create an account to join the conversation.
- RobotMatic
-
Topic Author
- Offline
- Elite Member
-
- Posts: 199
- Thank you received: 25
Please Log in or Create an account to join the conversation.
- RobotMatic
-
Topic Author
- Offline
- Elite Member
-
- Posts: 199
- Thank you received: 25
and2 in0> homing
in1> switch
out > fault
Please Log in or Create an account to join the conversation.
- Aciera
-
- Away
- Administrator
-
- Posts: 4767
- Thank you received: 2138
Thanks for reporting back.
Please Log in or Create an account to join the conversation.