Touch probe configuration
- elisa
- Offline
- Senior Member
-

Less
More
- Posts: 58
- Thank you received: 5
13 Dec 2020 10:49 #191843
by elisa
Replied by elisa on topic Touch probe configuration
Okay, I got it.
So I can drive it by setting the correct joint angles and then with #5070 I will get the probe status, right?
I use trivial kinematics because I process the joint angles with an other program, then I pass the gcode to LinuxCNC.
So I can drive it by setting the correct joint angles and then with #5070 I will get the probe status, right?
I use trivial kinematics because I process the joint angles with an other program, then I pass the gcode to LinuxCNC.
Please Log in or Create an account to join the conversation.
- elisa
- Offline
- Senior Member
-
Less
More
- Posts: 58
- Thank you received: 5
13 Dec 2020 10:58 #191847
by elisa
Replied by elisa on topic Touch probe configuration
No, I didn't do it. Is it necessary? How can I configure it with stepconf?
Alternatively, it will be sufficient to add a .HAL file with only the line "net probe parport.0.pin-10-in => motion.probe-input"?
Sorry if I'm asking a lot of questions but I'm a beginner.
Alternatively, it will be sufficient to add a .HAL file with only the line "net probe parport.0.pin-10-in => motion.probe-input"?
Sorry if I'm asking a lot of questions but I'm a beginner.
Please Log in or Create an account to join the conversation.
- MaHa
- Offline
- Platinum Member
-

Less
More
- Posts: 533
- Thank you received: 235
13 Dec 2020 14:19 #191863
by MaHa
Replied by MaHa on topic Touch probe configuration
I'm affraid, your probingroutine needs some improvement.
About #5070. After successful probing, it gets TRUE, it stays true, until unsuccessful probing occures (no contact). So your probing will not be done after the 1st successful probing. Set #5070=0 before calling the subroutine. Another thing, for a loop like 'O<control> while [#5070 NE 1]' ,something like
is needed at the top, or ending up in a endless loop when loading the routine.
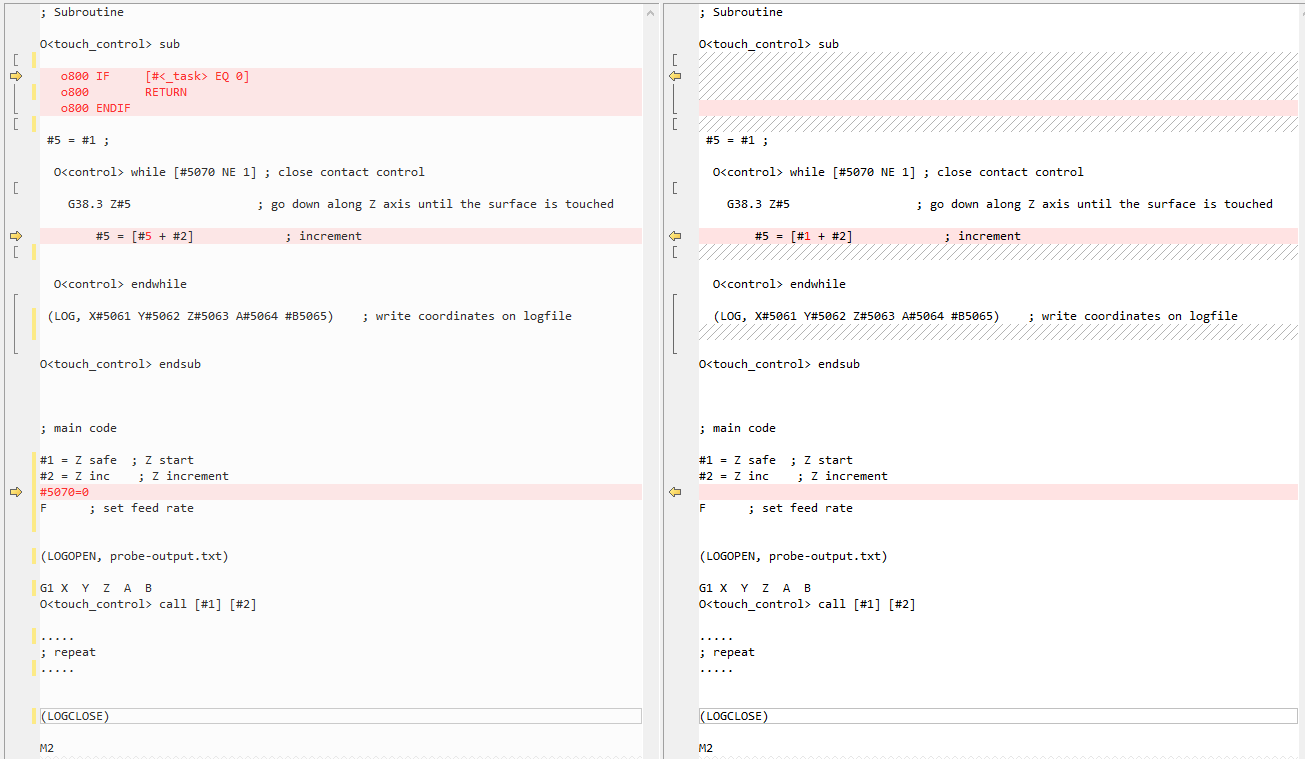
About #5070. After successful probing, it gets TRUE, it stays true, until unsuccessful probing occures (no contact). So your probing will not be done after the 1st successful probing. Set #5070=0 before calling the subroutine. Another thing, for a loop like 'O<control> while [#5070 NE 1]' ,something like
o800 IF [#<_task> EQ 0]
o800 RETURN
o800 ENDIF
The following user(s) said Thank You: Aciera, elisa
Please Log in or Create an account to join the conversation.
- elisa
- Offline
- Senior Member
-
Less
More
- Posts: 58
- Thank you received: 5
14 Dec 2020 08:46 #191944
by elisa
Replied by elisa on topic Touch probe configuration
Perfectly explained, thank you very much!
Please Log in or Create an account to join the conversation.
- hex705
- Offline
- New Member
-

Less
More
- Posts: 2
- Thank you received: 0
08 Feb 2021 18:00 #198034
by hex705
Replied by hex705 on topic Touch probe configuration
did you get this working ? if so, is it documented somewhere ?
Please Log in or Create an account to join the conversation.
- elisa
- Offline
- Senior Member
-
Less
More
- Posts: 58
- Thank you received: 5
11 Feb 2021 20:57 #198437
by elisa
Replied by elisa on topic Touch probe configuration
Yes, it worked with the code above
Please Log in or Create an account to join the conversation.
Time to create page: 1.705 seconds