System Identification for control
- jang
- Offline
- New Member
-

Less
More
- Posts: 7
- Thank you received: 0
21 Aug 2021 08:34 #218314
by jang
System Identification for control was created by jang
Hello
I'm student want to study CNCcontroller
I'm using LinuxCNC 2.8. on commercial gantry(H-type) CNC system was consist of dual servo motor
And I can run LinuxCNC with commercial gantry system
but, I can just run it.
Now, I want know about my system Identification
So I have to run the CNC with sine wave with various sine wave.
But, I can't command sine wave to LinuxCNC
I think I can use siggen or G-code for direct command similar with sine wave
How can I position or velocity command with sine wave to LinuxCNC ????????????
help me pleaseeeee
I'm student want to study CNCcontroller
I'm using LinuxCNC 2.8. on commercial gantry(H-type) CNC system was consist of dual servo motor
And I can run LinuxCNC with commercial gantry system
but, I can just run it.
Now, I want know about my system Identification
So I have to run the CNC with sine wave with various sine wave.
But, I can't command sine wave to LinuxCNC
I think I can use siggen or G-code for direct command similar with sine wave
How can I position or velocity command with sine wave to LinuxCNC ????????????
help me pleaseeeee
Please Log in or Create an account to join the conversation.
- aleksamc
-

- Offline
- Platinum Member
-

Less
More
- Posts: 569
- Thank you received: 67
21 Aug 2021 17:39 #218335
by aleksamc
Replied by aleksamc on topic System Identification for control
As for me, your topic is unclear.
1. It doesn't matter what gantry property is..
2. what is system identification do you mean?
"So I have to run the CNC with sine wave with various sine wave."
3. Do you know how many sine waves you need? I even not ask for what purpose you need them.
1. It doesn't matter what gantry property is..
2. what is system identification do you mean?
"So I have to run the CNC with sine wave with various sine wave."
3. Do you know how many sine waves you need? I even not ask for what purpose you need them.
Please Log in or Create an account to join the conversation.
- jang
- Offline
- New Member
-
Less
More
- Posts: 7
- Thank you received: 0
23 Aug 2021 06:45 - 23 Aug 2021 06:49 #218462
by jang
Replied by jang on topic System Identification for control
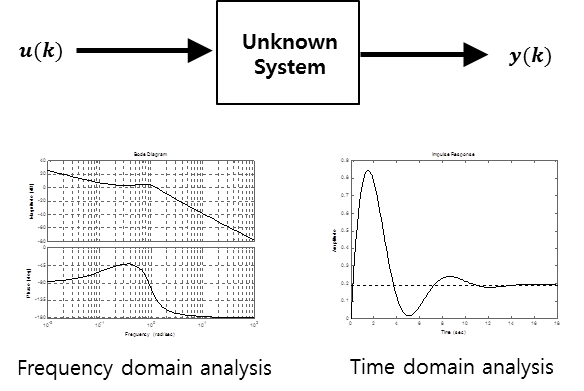
System Identification is required to see the dynamic characteristics of the system.
I want to get the ability to respond according to commands (for drawing bode plot)
this is mean system identification
To do this, I have to change the frequency of the sine wave according to time and apply it to the velocity(or position) command
finally I can get response ability from data.
I want to get the ability to respond according to commands (for drawing bode plot)
this is mean system identification
To do this, I have to change the frequency of the sine wave according to time and apply it to the velocity(or position) command
finally I can get response ability from data.
Last edit: 23 Aug 2021 06:49 by jang.
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4770
- Thank you received: 2138
23 Aug 2021 12:47 #218505
by Aciera
Replied by Aciera on topic System Identification for control
This is really just a stab in the dark:
If you make a gcode that commands a circle to be cut then one axis moves according to the sine and the other to the cosine. If you need to adjust the frequency of that then you would need to adjust the feed rate. If you need to adjust the frequency dynamically then you can use feed override while the machine moves.
Amplitude would be adjusted by making the circle bigger or smaller.
How do you measure the response of your router?
If you make a gcode that commands a circle to be cut then one axis moves according to the sine and the other to the cosine. If you need to adjust the frequency of that then you would need to adjust the feed rate. If you need to adjust the frequency dynamically then you can use feed override while the machine moves.
Amplitude would be adjusted by making the circle bigger or smaller.
How do you measure the response of your router?
Please Log in or Create an account to join the conversation.
- aleksamc
-
- Offline
- Platinum Member
-
Less
More
- Posts: 569
- Thank you received: 67
23 Aug 2021 18:47 #218534
by aleksamc
Replied by aleksamc on topic System Identification for control
Aciera It seems to me that he wants to analyze mechanical devices by analyzing op amps method.
Please Log in or Create an account to join the conversation.
- aleksamc
-
- Offline
- Platinum Member
-
Less
More
- Posts: 569
- Thank you received: 67
23 Aug 2021 18:52 #218536
by aleksamc
Replied by aleksamc on topic System Identification for control
I studied at university such subject as jang.
I must say, that with sine wave you will nothing see.
It should be anylized to the step responce.
I must say, that with sine wave you will nothing see.
It should be anylized to the step responce.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17997
- Thank you received: 5284
23 Aug 2021 19:21 - 23 Aug 2021 19:22 #218540
by PCW
Replied by PCW on topic System Identification for control
Well theoretically they are interchangeable via a Fourier transform
I suspect the main issue will be that the response to either
Step or Bode plot will be dominated by nonlinearities
I suspect the main issue will be that the response to either
Step or Bode plot will be dominated by nonlinearities
Last edit: 23 Aug 2021 19:22 by PCW.
Please Log in or Create an account to join the conversation.
- jang
- Offline
- New Member
-
Less
More
- Posts: 7
- Thank you received: 0
24 Aug 2021 10:14 #218607
by jang
Replied by jang on topic System Identification for control
I don't know router sorry,,, but I got data using ethercat. and so I can watch the data with halscope.How do you measure the response of your router?
Please Log in or Create an account to join the conversation.
- jang
- Offline
- New Member
-
Less
More
- Posts: 7
- Thank you received: 0
25 Aug 2021 05:42 #218677
by jang
Replied by jang on topic System Identification for control
thank you for your reply
I got some data about step command already
but I think the data can't be used for bodeplot
because bode plot require dynamic command and response like sine wave(in various frequency)
If I get the bode plot then I can know resonance(?) frequency or response which reached at -3dB
I have dual servo gantry system
Can I use stepgen in my linuxcnc ?? Or can I give velocity command with siggen???
First, I'll try with sim.axis example
I got some data about step command already
but I think the data can't be used for bodeplot
because bode plot require dynamic command and response like sine wave(in various frequency)
If I get the bode plot then I can know resonance(?) frequency or response which reached at -3dB
I have dual servo gantry system
Can I use stepgen in my linuxcnc ?? Or can I give velocity command with siggen???
First, I'll try with sim.axis example
Please Log in or Create an account to join the conversation.
- aleksamc
-
- Offline
- Platinum Member
-
Less
More
- Posts: 569
- Thank you received: 67
25 Aug 2021 20:05 #218733
by aleksamc
Replied by aleksamc on topic System Identification for control
As for me you will never get resonance freaquency in gantry system.
With increasing of the freaquency change, you will get decay of responce of your motor, it will overheet and may be, will give some smell. It all depends on your persistence.
Resonanse freaquency could be only in systems that has big PID regulator gains. You can increase this values - and resive resonance. I had such things. But if your gains in safe zone, you will never had problems with your gantry system because it's very inertial and has counterforces, if we spoke about cnc.
About stepgen I think it's witten in manual.
linuxcnc.org/docs/html/man/man9/stepgen.9.html
You need siggen set to the input of te stepgen, possibly.
With increasing of the freaquency change, you will get decay of responce of your motor, it will overheet and may be, will give some smell. It all depends on your persistence.
Resonanse freaquency could be only in systems that has big PID regulator gains. You can increase this values - and resive resonance. I had such things. But if your gains in safe zone, you will never had problems with your gantry system because it's very inertial and has counterforces, if we spoke about cnc.
About stepgen I think it's witten in manual.
linuxcnc.org/docs/html/man/man9/stepgen.9.html
You need siggen set to the input of te stepgen, possibly.
Please Log in or Create an account to join the conversation.
Time to create page: 0.155 seconds