Why the circle drawed by "G2 X390 Y-280 I5 J0" not round?
- PCW
-

- Away
- Moderator
-

- Posts: 17999
- Thank you received: 5285
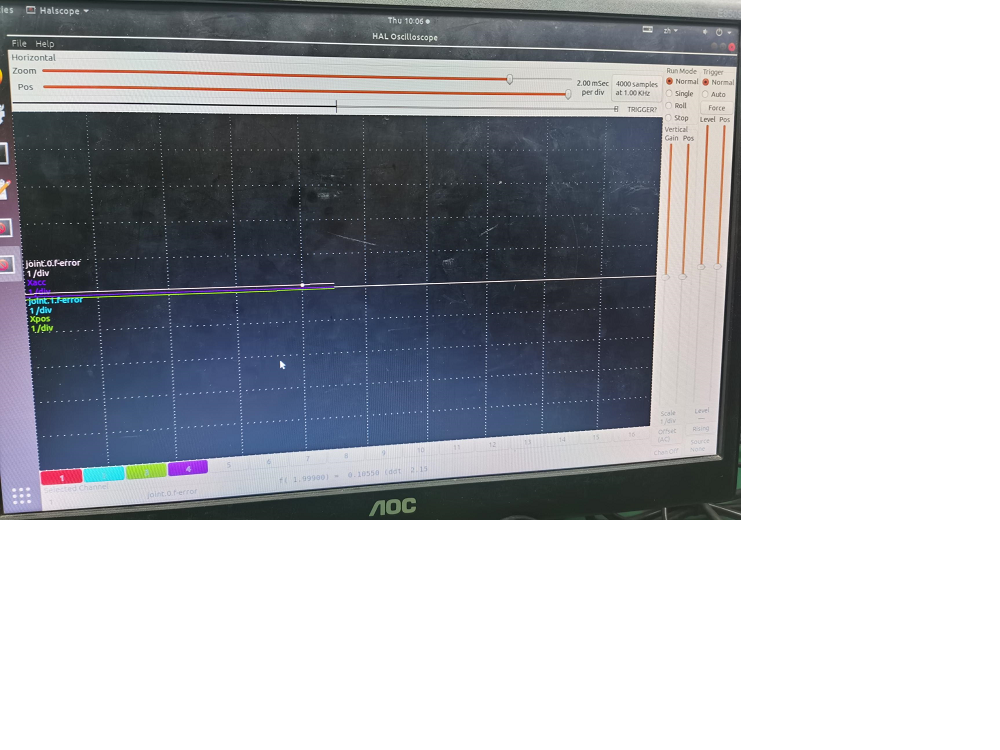
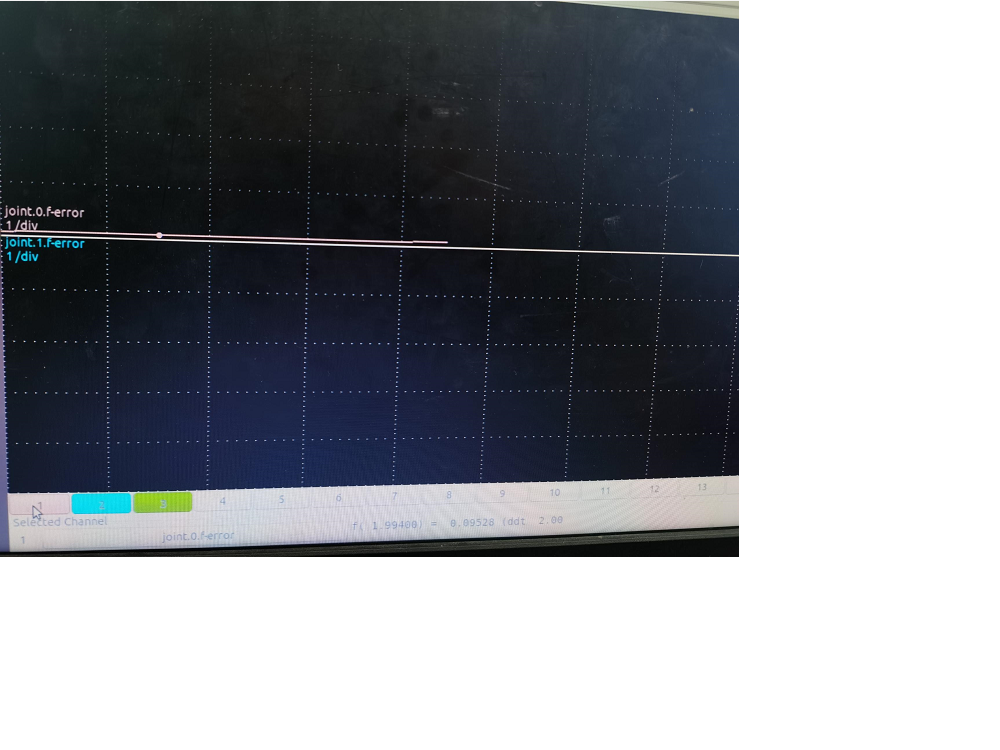
would be 1 so the following errors would be:
joint.0.f-error
and
joint.1.f-error
(both are pins)
Please Log in or Create an account to join the conversation.
- curran209
- Offline
- Senior Member
-

- Posts: 56
- Thank you received: 0

Attachments:
Please Log in or Create an account to join the conversation.
- curran209
- Offline
- Senior Member
-
- Posts: 56
- Thank you received: 0
Attachments:
Please Log in or Create an account to join the conversation.
- curran209
- Offline
- Senior Member
-
- Posts: 56
- Thank you received: 0
Attachments:
Please Log in or Create an account to join the conversation.
- curran209
- Offline
- Senior Member
-
- Posts: 56
- Thank you received: 0
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
- Posts: 17999
- Thank you received: 5285
providing the actual feedback position
This hal statement connects LinuxCNC joint 0 position command to the drive:
net Xpos joint.0.motor-pos-cmd => lcec.0.0.TxPositionCommand
This (disabled) hal section looks like it attempts to provide the joint 0
feedback position to LinuxCNC
#net xpos-cmd joint.0.motor-pos-cmd => x_scale_cmd.in
#setp x_scale_cmd.gain [JOINT_0]PSCALE #invert of above
#setp x_scale_cmd.offset 0
#net PosCmdX-Scaled <= x_scale_cmd.out
#net RawPositionFeedback0 lcec.0.0.RxPositionFeedback => x_scale_fb.in
#setp x_scale_fb.gain [JOINT_0]PSCALE_INV #invert of below
#setp x_scale_fb.offset 0
#net xpos-fb joint.0.motor-pos-fb <= x_scale_fb.out
Please Log in or Create an account to join the conversation.
- curran209
- Offline
- Senior Member
-
- Posts: 56
- Thank you received: 0
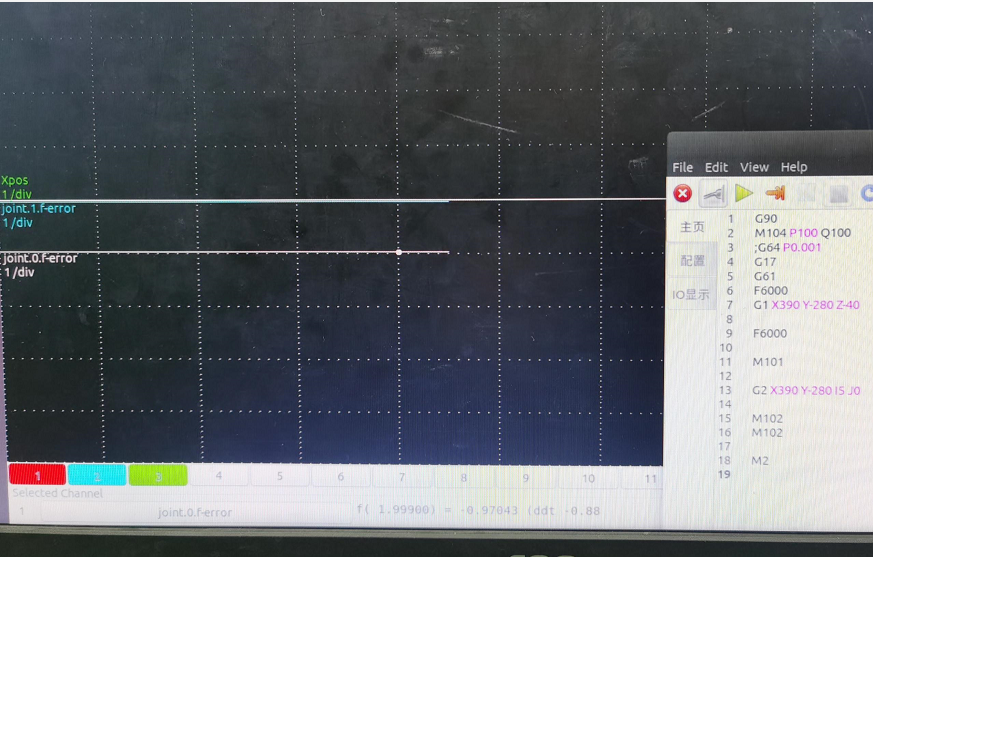
net Xpos_fb lcec.0.0.RxPositionFeedback => joint.0.motor-pos-fb
looks like i sampled the the joint 0 feedback position to LinuxCNC, it's xpos_fb

Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
- Posts: 17999
- Thank you received: 5285
Yes, but that was commented out in your original hal file.Isn't this sentence the statement that provide the joint 0 feedback position to LinuxCNC?
net Xpos_fb lcec.0.0.RxPositionFeedback => joint.0.motor-pos-fb
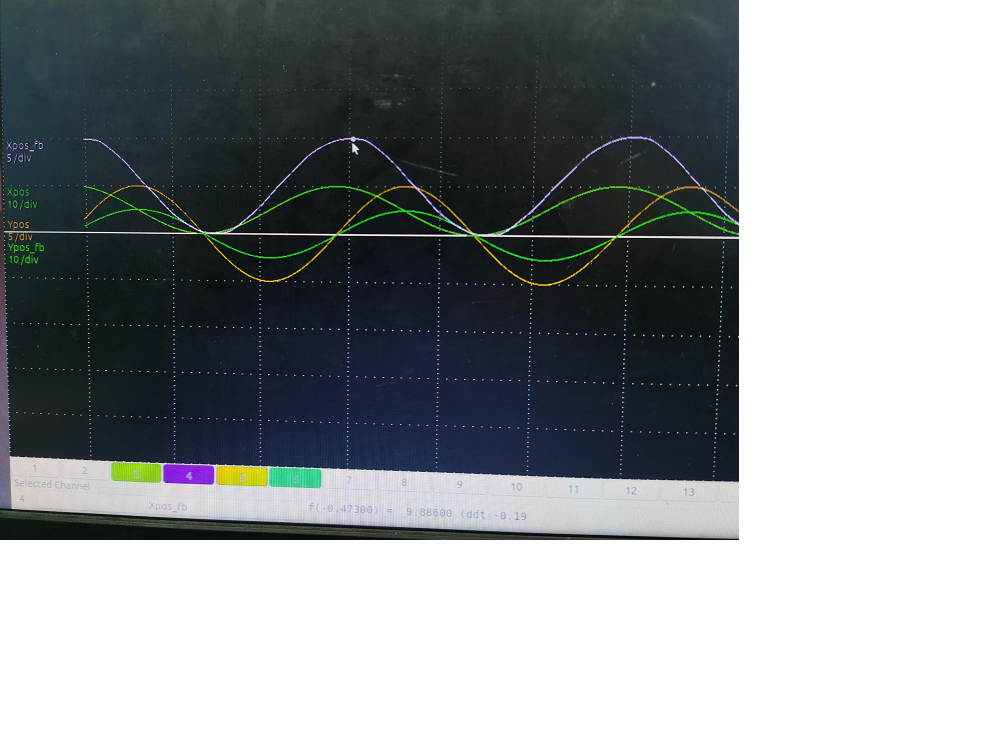
Looks like the X axis drive is poorly tuned
(not following the commanded position)
Please Log in or Create an account to join the conversation.
- curran209
- Offline
- Senior Member
-
- Posts: 56
- Thank you received: 0
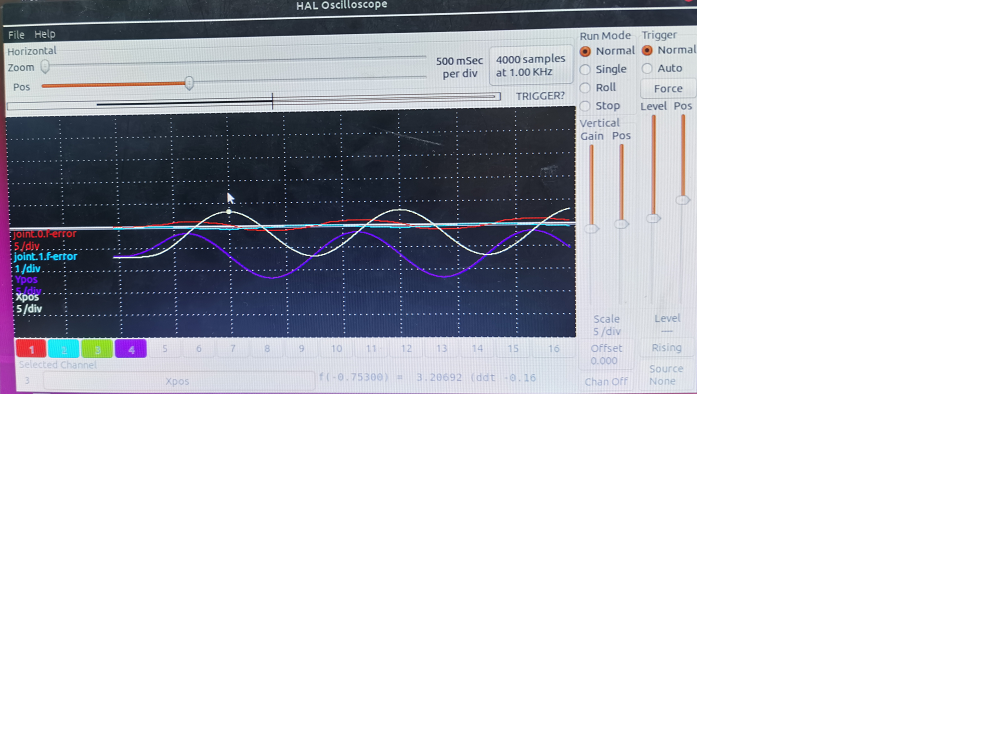
What's the meaning ddt on bottom in halscope UI.
I find Xpos_fb's waveform lags Xpos's waveform 50ms, but y axis hasn't it, what's the reason of this problem generally?


Attachments:
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
- Posts: 19886
- Thank you received: 4645
It's the rate of change of the signal at the cursor position. ddt = dX/dt.What's the meaning ddt on bottom in halscope UI.
Please Log in or Create an account to join the conversation.