- LinuxCNC
- General LinuxCNC Questions
- What is the difference between parallel port control board and mesa control boar
What is the difference between parallel port control board and mesa control boar
- tuzki
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

Less
More
- Posts: 48
- Thank you received: 1
26 Oct 2021 06:52 #224337
by tuzki
What is the difference between parallel port control board and mesa control boar was created by tuzki
Hello everyone.
I found that LinuxCNC can be controlled by a parallel port control board or go to the mesa official website to buy a mesa control board . I want to know the difference between these two methods.
For example, the mesa 7i96 control board.
I want to know what processing is done after the mesa 7i96 control board is connected to LinuxCNC.
I found that LinuxCNC can be controlled by a parallel port control board or go to the mesa official website to buy a mesa control board . I want to know the difference between these two methods.
For example, the mesa 7i96 control board.
I want to know what processing is done after the mesa 7i96 control board is connected to LinuxCNC.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19886
- Thank you received: 4645
26 Oct 2021 08:00 #224344
by andypugh
Replied by andypugh on topic What is the difference between parallel port control board and mesa control boar
Both systems are the same in the servo thread. All the same modules work together to create a new waypoint for each axis every 1ms.
In the case of the parallel port this waypoint is sent to code running in the base thread (typically 20us +/- 10us), which drives the parallel port pins.
With a Mesa card the waypoint is sent to an FPGA (base clock period 20nS +/- 1nS) which creates the step pulses.
Both can work perfectly adequately. But the Mesa card can step much faster and at much more accurate frequencies, which can sometimes allow for higher motor speeds even with the same hardware.
Also, the p-port has a limited number of pins, whereas Mesa hardware can be expanded to thousands of pins if needed.
The p-port is only really useful for step/dir and low-count encoders. Mesa cards can drive a much wider variety of hardware (analog servo, resolver....)
The p-port is cheaper.
I would suggest starting with a parallel port if you don't know what you need.
In the case of the parallel port this waypoint is sent to code running in the base thread (typically 20us +/- 10us), which drives the parallel port pins.
With a Mesa card the waypoint is sent to an FPGA (base clock period 20nS +/- 1nS) which creates the step pulses.
Both can work perfectly adequately. But the Mesa card can step much faster and at much more accurate frequencies, which can sometimes allow for higher motor speeds even with the same hardware.
Also, the p-port has a limited number of pins, whereas Mesa hardware can be expanded to thousands of pins if needed.
The p-port is only really useful for step/dir and low-count encoders. Mesa cards can drive a much wider variety of hardware (analog servo, resolver....)
The p-port is cheaper.
I would suggest starting with a parallel port if you don't know what you need.
The following user(s) said Thank You: tuzki
Please Log in or Create an account to join the conversation.
- tuzki
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 48
- Thank you received: 1
26 Oct 2021 11:46 #224377
by tuzki
Replied by tuzki on topic What is the difference between parallel port control board and mesa control boar
Thank you for your answer. It's very helpful to me as a novice.
As you said, if you use the mesa control board, LinuxCNC will send the waypoint to the mesa control board for processing, so why the speed of the mesa control board is faster than that of the parallel port control board.
I feel that if waypoint is put on a PC for processing, the CPU speed of the PC will definitely be faster than that of the mesa.
If I do not use the parallel port control board, I use ethercat to connect the servo drive with ethercat function, is this waypoint still put on the PC for processing?
As you said, if you use the mesa control board, LinuxCNC will send the waypoint to the mesa control board for processing, so why the speed of the mesa control board is faster than that of the parallel port control board.
I feel that if waypoint is put on a PC for processing, the CPU speed of the PC will definitely be faster than that of the mesa.
If I do not use the parallel port control board, I use ethercat to connect the servo drive with ethercat function, is this waypoint still put on the PC for processing?
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
26 Oct 2021 12:15 - 26 Oct 2021 12:16 #224384
by andypugh
The limitation with software step generation is the rate at which the realtime system can service the realtime threads. With a typical latency of about 10uS you can't really call that thread more frequently than every 20uS.
Replied by andypugh on topic What is the difference between parallel port control board and mesa control boar
As you said, if you use the mesa control board, LinuxCNC will send the waypoint to the mesa control board for processing, so why the speed of the mesa control board is faster than that of the parallel port control board.
The limitation with software step generation is the rate at which the realtime system can service the realtime threads. With a typical latency of about 10uS you can't really call that thread more frequently than every 20uS.
Last edit: 26 Oct 2021 12:16 by andypugh.
Please Log in or Create an account to join the conversation.
- tuzki
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 48
- Thank you received: 1
26 Oct 2021 16:50 #224404
by tuzki
Thank you for your answer.
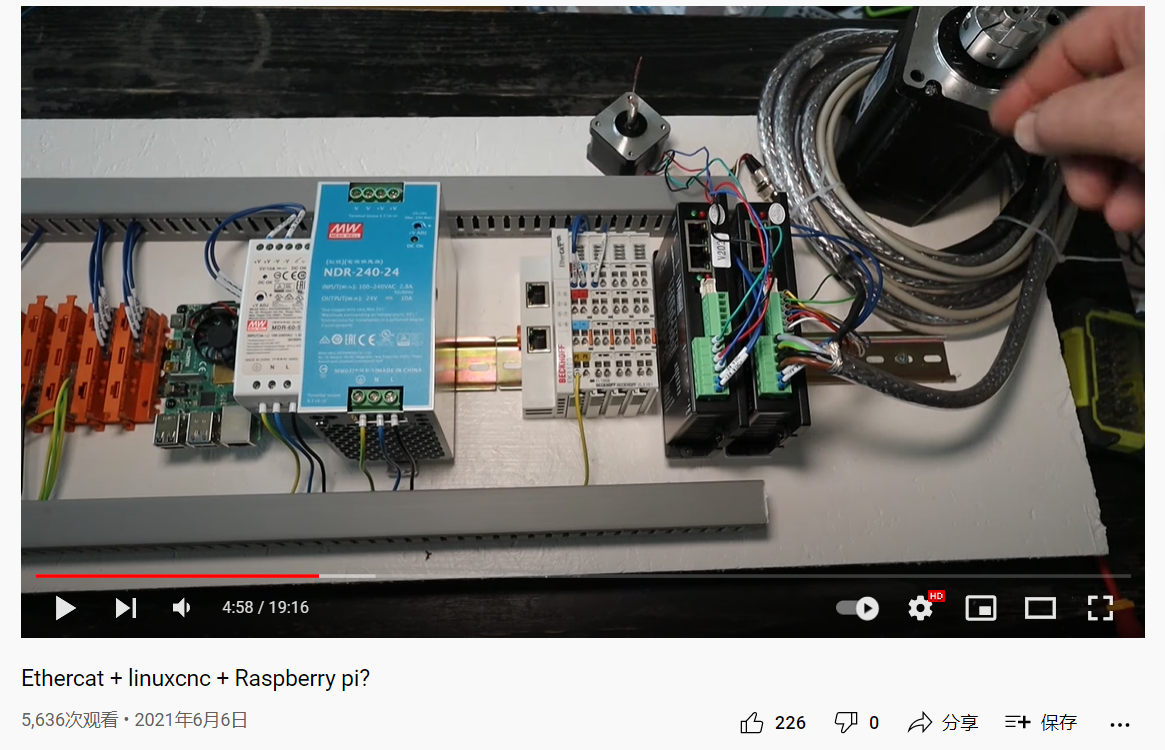
If the control system is built according to this picture, will the overall speed be greatly improved?
Is waypoint still processed in PC and then sent to servo driver through EtherCAT?
Replied by tuzki on topic What is the difference between parallel port control board and mesa control boar
Thank you for your answer.
If the control system is built according to this picture, will the overall speed be greatly improved?
Is waypoint still processed in PC and then sent to servo driver through EtherCAT?
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-
Less
More
- Posts: 17999
- Thank you received: 5285
26 Oct 2021 18:51 #224412
by PCW
Replied by PCW on topic What is the difference between parallel port control board and mesa control boar
Yes with EtherCAT, the waypoints are typically sent to the drive.
The drive will typically do interpolation between waypoints.
The drive will typically do interpolation between waypoints.
Please Log in or Create an account to join the conversation.
- LinuxCNC
- General LinuxCNC Questions
- What is the difference between parallel port control board and mesa control boar
Time to create page: 0.250 seconds