5 axis tilted drilling
- Yannis
- Offline
- Elite Member
-

Less
More
- Posts: 297
- Thank you received: 4
30 Sep 2022 12:44 #253094
by Yannis
5 axis tilted drilling was created by Yannis
Hello
in a head _head 5 axis machine is there a way to move manually the machine according the A and B axis to drill a hole?
something similar to the Polar move depending from tow axis A and B

in a head _head 5 axis machine is there a way to move manually the machine according the A and B axis to drill a hole?
something similar to the Polar move depending from tow axis A and B
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4754
- Thank you received: 2134
30 Sep 2022 13:45 #253099
by Aciera
Replied by Aciera on topic 5 axis tilted drilling
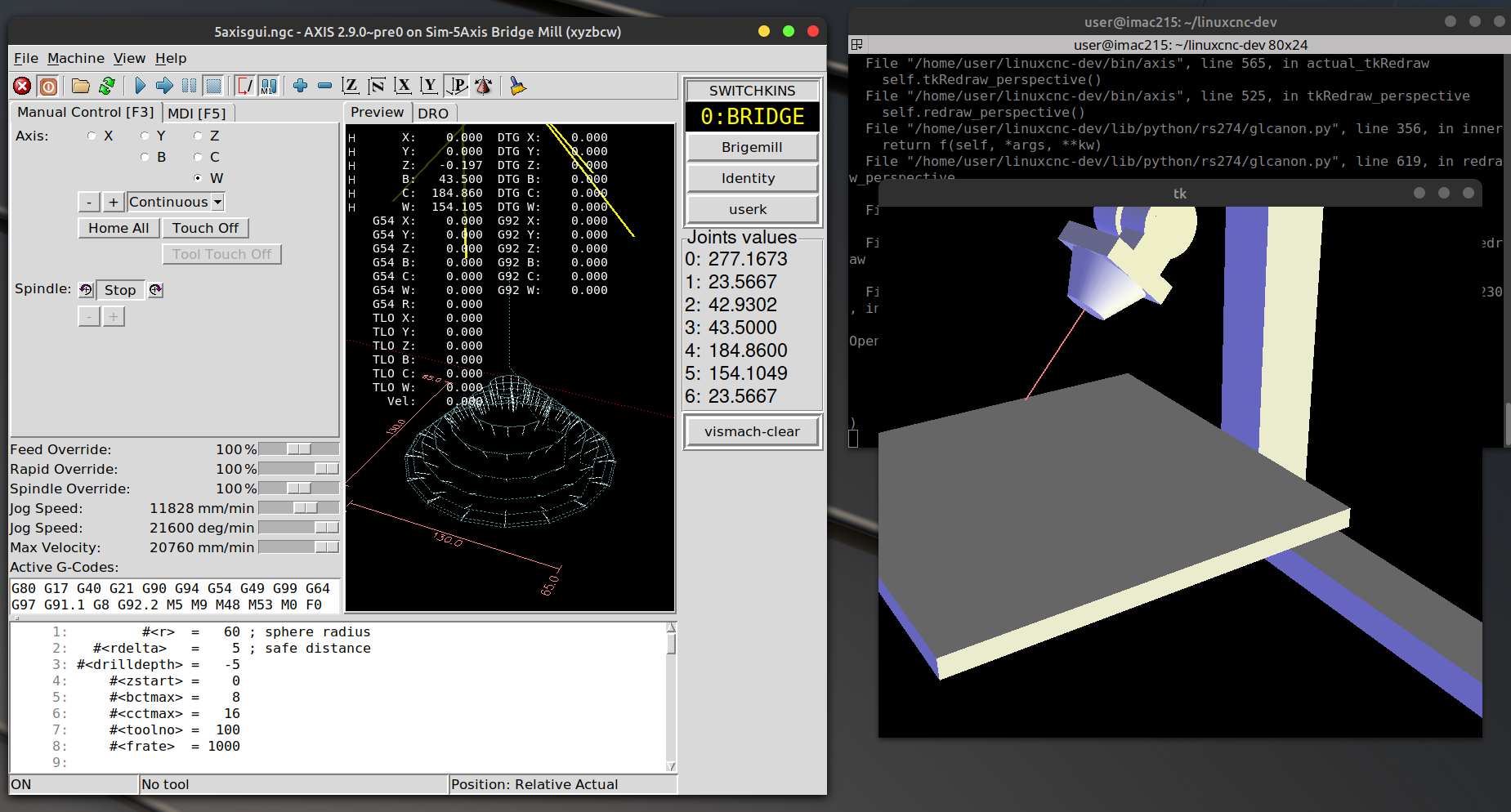
Have a look at the bridgemill simulation configuration (this uses W to move the tool along its rotational axis for drilling):
configs/sim/axis/vismach/5axis/bridgemill
configs/sim/axis/vismach/5axis/bridgemill
Attachments:
The following user(s) said Thank You: Yannis
Please Log in or Create an account to join the conversation.
- Yannis
- Offline
- Elite Member
-
Less
More
- Posts: 297
- Thank you received: 4
01 Oct 2022 05:22 #253146
by Yannis
Replied by Yannis on topic 5 axis tilted drilling
I find this in a similar post
So a rephrase the question
Is there a way to add W axis in my machine?
What sud i add in my configuration files to do so?
Replied by Aciera on topic XYYZBC-str config
Regarding the W-"axis": This is not a physical axis but rather a way to command a coordinated move by the physical xyz axis to move the tool along its rotational axis.
For example if you wanted to drill a hole to a depth of -5 with a drillbit with B and/or C at any angle you would command say G01 W-5 and the drillbit would then move along its axis by -5. Then you could do G0 W10 and the bit would be retracted with a rapid move by 10.
So I don't think you would define a W axis in the INI because that would probably do strange things. (MAybe check in the 5axiskins-sim config)
edit: I think I might be wrong there. So you would define it in the INI so you get a DRO for it.
Note that xyz-bc-trt-kins is for a machine where the tilt and rotation is done by the table. You need a kinematic where the B and C movement is done by the spindle. I think 5axiskins is the one you want.
So a rephrase the question
Is there a way to add W axis in my machine?
What sud i add in my configuration files to do so?
Replied by Aciera on topic XYYZBC-str config
Regarding the W-"axis": This is not a physical axis but rather a way to command a coordinated move by the physical xyz axis to move the tool along its rotational axis.
For example if you wanted to drill a hole to a depth of -5 with a drillbit with B and/or C at any angle you would command say G01 W-5 and the drillbit would then move along its axis by -5. Then you could do G0 W10 and the bit would be retracted with a rapid move by 10.
So I don't think you would define a W axis in the INI because that would probably do strange things. (MAybe check in the 5axiskins-sim config)
edit: I think I might be wrong there. So you would define it in the INI so you get a DRO for it.
Note that xyz-bc-trt-kins is for a machine where the tilt and rotation is done by the table. You need a kinematic where the B and C movement is done by the spindle. I think 5axiskins is the one you want.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4754
- Thank you received: 2134
01 Oct 2022 07:08 - 01 Oct 2022 07:14 #253148
by Aciera
Replied by Aciera on topic 5 axis tilted drilling
Looking at the 5axis.ini in the bridgemill config should give some information as to what is required:
Looks like you will have to add the W axis to the config and use KINEMATICS = 5axiskins coordinates=xyzbcwy
Note that the simulation config uses a gantry for Y so you might have to change coordinates = xyzbcw
Do you already have a config for your machine? If so please post your ini files.
[EMC]
VERSION = 1.1
MACHINE = Sim-5Axis Bridge Mill (xyzbcw)
DEBUG = 0
[DISPLAY]
GEOMETRY = XYZCBW
OPEN_FILE = ./5axisgui.ngc
INCREMENTS = 10 mm, 1 mm, .1 mm
JOG_AXES = XYZC
GEOMETRY = XYZCBW
DISPLAY = axis
CYCLE_TIME = 0.200
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.0
PROGRAM_PREFIX = ../../nc_files/
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
TOOL_EDITOR = tooledit z diam
#EDITOR = gedit
PYVCP = 5axis.xml
[RS274NGC]
SUBROUTINE_PATH = ./remap_subs
HAL_PIN_VARS = 1
REMAP = M428 modalgroup=10 ngc=428remap
REMAP = M429 modalgroup=10 ngc=429remap
REMAP = M430 modalgroup=10 ngc=430remap
PARAMETER_FILE = 5axis.var
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
SERVO_PERIOD = 1000000
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[HAL]
HALUI = halui
HALFILE = LIB:basic_sim.tcl
HALFILE = 5axisgui.hal
HALCMD = net :kinstype-select <= motion.analog-out-03 => motion.switchkins-type
POSTGUI_HALFILE = 5axis_postgui.hal
[HALUI]
# M428:bridgemill (kinstype==0 startupDEFAULT)
# M429:identity kins (kinstype==1)
# M430:userk kins (kinstype==2)
MDI_COMMAND = M428
MDI_COMMAND = M429
MDI_COMMAND = M430
[TRAJ]
COORDINATES = XYZBCWY
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
MAX_ANGULAR_VELOCITY = 360.0
DEFAULT_LINEAR_VELOCITY = 200.0
MAX_LINEAR_VELOCITY = 346.0
MAX_LINEAR_ACCELERATION = 800.0
DEFAULT_LINEAR_ACCELERATION = 800.0
MAX_ANGULAR_VELOCITY = 360
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = 5axis.tbl
[KINS]
# Note: Supported coordinates are XYZBCW but the W coordinate
# motion is incorporated into the X,Y,Z axes.
# Use of the W coordinate requires a joint (5)
# in order to allow display of W values.
# Use immediate homing for this joint (JOINT_5)
# Note: 5axiskins is misnomer
# (xyzbcw uses 6 joints)
# (xyzbcwy uses 7 joints)
# xyzbcw
# type0:5axiskins, type1:identity, type2:userk
# x:joint0,y:joint1,z:joint2,b:joint3,c:joint4,w:joint5
# JOINTS = 6
# KINEMATICS = 5axiskins
# illustraed below is complex example with duplicate
# coord letters for y, 7 joints total):
# type0:5axiskins, type1:identity, type2:userk
# x:joint0
# y:joint1 AND joint6
# z:joint2
# b:joint3
# c:joint4
# w:joint5
JOINTS = 7
KINEMATICS = 5axiskins coordinates=xyzbcwy
[AXIS_X]
MIN_LIMIT = -500
MAX_LIMIT = 500
MAX_VELOCITY = 200
MAX_ACCELERATION = 800
[AXIS_Y]
MIN_LIMIT = -500
MAX_LIMIT = 500
MAX_VELOCITY = 200
MAX_ACCELERATION = 800
[AXIS_Z]
MIN_LIMIT = -500
MAX_LIMIT = 100
MAX_VELOCITY = 200
MAX_ACCELERATION = 800
# B is one-to-one to JOINT_3
[AXIS_B]
MIN_LIMIT = -120
MAX_LIMIT = 120
MAX_VELOCITY = 60
MAX_ACCELERATION = 200
# C is one-to-one to JOINT_4
[AXIS_C]
MIN_LIMIT = -36000
MAX_LIMIT = 36000
MAX_VELOCITY = 60
MAX_ACCELERATION = 200
# W motion is incorporated in Z motion
# but a joint (JOINT_5) must be configured
# to support display of W values
[AXIS_W]
MIN_LIMIT = -100
MAX_LIMIT = 500
MAX_VELOCITY = 200
MAX_ACCELERATION = 800
[JOINT_0]
TYPE = LINEAR
MAX_VELOCITY = 200
MAX_ACCELERATION = 800
MIN_LIMIT = -500
MAX_LIMIT = 500
HOME_SEARCH_VEL = 0
HOME_SEQUENCE = 0
[JOINT_1]
TYPE = LINEAR
MAX_VELOCITY = 200
MAX_ACCELERATION = 800
MIN_LIMIT = -500
MAX_LIMIT = 500
HOME_SEARCH_VEL = 0
HOME_SEQUENCE = -1
# joints 1 and 6 used for y
[JOINT_6]
TYPE = LINEAR
MAX_VELOCITY = 200
MAX_ACCELERATION = 800
MIN_LIMIT = -500
MAX_LIMIT = 500
HOME_SEARCH_VEL = 0
HOME_SEQUENCE = -1
[JOINT_2]
TYPE = LINEAR
MAX_VELOCITY = 200
MAX_ACCELERATION = 800
MIN_LIMIT = -500
MAX_LIMIT = 100
HOME_SEARCH_VEL = 0
HOME_SEQUENCE = 0
[JOINT_3]
TYPE = ANGULAR
MAX_VELOCITY = 60
MAX_ACCELERATION = 200
MIN_LIMIT = -120
MAX_LIMIT = 120
HOME_SEARCH_VEL = 0
HOME_SEQUENCE = 0
[JOINT_4]
TYPE = ANGULAR
MAX_VELOCITY = 60
MAX_ACCELERATION = 200
MIN_LIMIT = -36000
MAX_LIMIT = 36000
HOME_SEARCH_VEL = 0
HOME_SEQUENCE = 0
# immediate homing for JOINT_5 (w coordinate)
[JOINT_5]
TYPE = LINEAR
MIN_LIMIT = -100
MAX_LIMIT = 500
MAX_VELOCITY = 200
MAX_ACCELERATION = 800
HOME_SEARCH_VEL = 0
HOME_SEQUENCE = 0Looks like you will have to add the W axis to the config and use KINEMATICS = 5axiskins coordinates=xyzbcwy
Note that the simulation config uses a gantry for Y so you might have to change coordinates = xyzbcw
Do you already have a config for your machine? If so please post your ini files.
Last edit: 01 Oct 2022 07:14 by Aciera.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4754
- Thank you received: 2134
01 Oct 2022 07:17 #253149
by Aciera
Replied by Aciera on topic 5 axis tilted drilling
Note:
The config I posted is from LinuxCNC version 2.9 (ie master) if you are on 2.8 then the switchable kinematics (switchkins) feature is not available and the ini would look slightly different.
The config I posted is from LinuxCNC version 2.9 (ie master) if you are on 2.8 then the switchable kinematics (switchkins) feature is not available and the ini would look slightly different.
The following user(s) said Thank You: Yannis
Please Log in or Create an account to join the conversation.
- Yannis
- Offline
- Elite Member
-
Less
More
- Posts: 297
- Thank you received: 4
01 Oct 2022 08:46 #253153
by Yannis
Replied by Yannis on topic 5 axis tilted drilling
here is the ini file
where else is required to change/add files?
?
where else is required to change/add files?
?
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4754
- Thank you received: 2134
01 Oct 2022 10:50 - 01 Oct 2022 10:54 #253163
by Aciera
Replied by Aciera on topic 5 axis tilted drilling
Seems you are working with version 2.7. I'm less familiar with versions lower than 2.8 but here is a suggestion (make sure to backup your current ini file before making the changes.
The only other file needed would be the "5axiskins" file and I _think_ that is present in version 2.7. Also you seem to have the machine configured as XYZAB which seems odd as with the tilting rotational head you posted the rotation axis would be C. I will need to change your ini to the XYZBC setup because the 5axiskins used in the bridgemill simulation config uses that, so you might have to change the axis letter A to B and B to C in your .hal file.
Try changing/ adding the following lines in the sections indicated:
[DISPLAY]
GEOMETRY = XYZCBW
[TRAJ]
COORDINATES = XYZBCWY
[KINS]
JOINTS = 6
KINEMATICS = 5axiskins coordinates=xyzbcw
before the spindle section add (you will likely have to adjust the limit and velocity/accelleration values to your needs):
#********************
# Axis W
#********************
[AXIS_5]
TYPE = LINEAR
MIN_LIMIT = -10
MAX_LIMIT = 20
MAX_VELOCITY = 40
MAX_ACCELERATION = 70
HOME_SEARCH_VEL = 0
edit:
Forgot that you will likely also need to add stuff (ie pid) to your .hal file for the W axis so post that file if you are having trouble getting it running
The only other file needed would be the "5axiskins" file and I _think_ that is present in version 2.7. Also you seem to have the machine configured as XYZAB which seems odd as with the tilting rotational head you posted the rotation axis would be C. I will need to change your ini to the XYZBC setup because the 5axiskins used in the bridgemill simulation config uses that, so you might have to change the axis letter A to B and B to C in your .hal file.
Try changing/ adding the following lines in the sections indicated:
[DISPLAY]
GEOMETRY = XYZCBW
[TRAJ]
COORDINATES = XYZBCWY
[KINS]
JOINTS = 6
KINEMATICS = 5axiskins coordinates=xyzbcw
before the spindle section add (you will likely have to adjust the limit and velocity/accelleration values to your needs):
#********************
# Axis W
#********************
[AXIS_5]
TYPE = LINEAR
MIN_LIMIT = -10
MAX_LIMIT = 20
MAX_VELOCITY = 40
MAX_ACCELERATION = 70
HOME_SEARCH_VEL = 0
edit:
Forgot that you will likely also need to add stuff (ie pid) to your .hal file for the W axis so post that file if you are having trouble getting it running
Last edit: 01 Oct 2022 10:54 by Aciera.
The following user(s) said Thank You: Yannis
Please Log in or Create an account to join the conversation.
- Yannis
- Offline
- Elite Member
-
Less
More
- Posts: 297
- Thank you received: 4
03 Oct 2022 05:19 #253311
by Yannis
Replied by Yannis on topic 5 axis tilted drilling
The HAL file
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4754
- Thank you received: 2134
03 Oct 2022 06:47 - 03 Oct 2022 06:51 #253315
by Aciera
Replied by Aciera on topic 5 axis tilted drilling
Here is a modified version to try. There will likely be errors on startup if you can't figure those out you will need to post the errors and your ini and hal file.
Last edit: 03 Oct 2022 06:51 by Aciera. Reason: file missing
The following user(s) said Thank You: Yannis
Please Log in or Create an account to join the conversation.
- Yannis
- Offline
- Elite Member
-
Less
More
- Posts: 297
- Thank you received: 4
03 Oct 2022 09:34 #253329
by Yannis
Replied by Yannis on topic 5 axis tilted drilling
i try to convert the A axis to C and i have this error
Attachments:
Please Log in or Create an account to join the conversation.
Time to create page: 0.193 seconds