Vismach - The easist example
- zz912
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 592
- Thank you received: 96
20 Mar 2023 11:15 #267132
by zz912
Vismach - The easist example was created by zz912
Hello,
I am trying make something "Hello to world" for Vismach.
but it returns:
I am trying make something "Hello to world" for Vismach.
#imports
from vismach import *
import hal
#create the HAL component and pins
comp = hal.component("vismach-example")
comp.newpin("joint0", hal.HAL_FLOAT, hal.HAL_IN)
comp.newpin("joint1", hal.HAL_FLOAT, hal.HAL_IN)
comp.newpin("joint2", hal.HAL_FLOAT, hal.HAL_IN)
#create the floor, tool and work
floor = Box(-50, -50, -3, 50, 50, 0)
work = Capture()
tooltip = Capture()
#Build and assemble the model
part1 = Collection([Box(-6,-3,94,6,3,100)])
#part1 = Color([1,1,1,1],[part1])
#part1 = HalRotate([part1],comp,"joint0",360,0,0,1)
#part1 = Translate([part1],-1,49,0)
#create a top-level model
model = Collection([part1])
#Start the visualization
main(model, tooltip, work, 100)but it returns:
halcmd: loadusr vismach-example
halcmd: Exception in Tkinter callback
Traceback (most recent call last):
File "/usr/lib/python3.7/tkinter/__init__.py", line 1705, in __call__
return self.func(*args)
File "/home/zdenek/linuxcnc/linuxcnc-2.9_2023-03-15/lib/python/rs274/OpenGLTk.py", line 374, in tkExpose
self.tkRedraw()
File "/home/zdenek/linuxcnc/linuxcnc-2.9_2023-03-15/lib/python/rs274/OpenGLTk.py", line 351, in tkRedraw
self.redraw()
File "/home/zdenek/linuxcnc/linuxcnc-2.9_2023-03-15/lib/python/vismach.py", line 820, in redraw
view2work = invert(self.work2view.t)
File "/home/zdenek/linuxcnc/linuxcnc-2.9_2023-03-15/lib/python/vismach.py", line 668, in invert
inv[0][1],inv[1][0] = inv[1][0],inv[0][1]
IndexError: list index out of range
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4709
- Thank you received: 2106
20 Mar 2023 18:24 - 20 Mar 2023 18:25 #267174
by Aciera
Replied by Aciera on topic Vismach - The easist example
part1 = Collection([Box(-6,-3,94,6,3,100)])
model = Collection([part1])
If I am not mistaken the 'Collection' function expects two or more list entries while you pass only one item
[edit]
Maybe try:
part1 = Box(-6,-3,94,6,3,100)
model = part1
model = Collection([part1])
If I am not mistaken the 'Collection' function expects two or more list entries while you pass only one item
[edit]
Maybe try:
part1 = Box(-6,-3,94,6,3,100)
model = part1
Last edit: 20 Mar 2023 18:25 by Aciera.
The following user(s) said Thank You: zz912
Please Log in or Create an account to join the conversation.
- zz912
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 592
- Thank you received: 96
21 Mar 2023 07:46 #267210
by zz912
Replied by zz912 on topic Vismach - The easist example
I changed it:
But it returns the same thing.
It's weird that lineardelta.py and others Vismach work.
When I started building the new Vismach, I started trimming lineardelta.py. Fortunately after deleting many lines it stopped working.
So I wanted to do it the other way around and I exited this example and it also fails.
linuxcnc.org/docs/2.9/html/gui/vismach.h..._of_a_vismach_script
#!/usr/bin/env python3
#imports
from vismach import *
import hal
#create the HAL component and pins
comp = hal.component("vismach-example")
comp.newpin("joint0", hal.HAL_FLOAT, hal.HAL_IN)
comp.newpin("joint1", hal.HAL_FLOAT, hal.HAL_IN)
comp.newpin("joint2", hal.HAL_FLOAT, hal.HAL_IN)
#create the floor, tool and work
floor = Box(-50, -50, -3, 50, 50, 0)
work = Capture()
tooltip = Capture()
#Build and assemble the model
part1 = Box(-6,-3,94,6,3,100)
#create a top-level model
model = part1
#Start the visualization
main(model, tooltip, work, 100)But it returns the same thing.
It's weird that lineardelta.py and others Vismach work.
When I started building the new Vismach, I started trimming lineardelta.py. Fortunately after deleting many lines it stopped working.
So I wanted to do it the other way around and I exited this example and it also fails.
linuxcnc.org/docs/2.9/html/gui/vismach.h..._of_a_vismach_script
Please Log in or Create an account to join the conversation.
- zz912
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 592
- Thank you received: 96
21 Mar 2023 08:03 #267211
by zz912
Replied by zz912 on topic Vismach - The easist example
It wooooorrkkkksssss !!!
"model" must contain "tooltip, work"
#!/usr/bin/env python3
#imports
from vismach import *
import hal
#create the HAL component and pins
comp = hal.component("vismach-example")
comp.newpin("joint0", hal.HAL_FLOAT, hal.HAL_IN)
comp.newpin("joint1", hal.HAL_FLOAT, hal.HAL_IN)
comp.newpin("joint2", hal.HAL_FLOAT, hal.HAL_IN)
#create the floor, tool and work
floor = Box(-50, -50, -3, 50, 50, 0)
work = Capture()
tooltip = Capture()
#Build and assemble the model
part1 = Box(-6,-3,94,6,3,100)
#create a top-level model
model = Collection([part1, floor, tooltip, work])
#Start the visualization
main(model, tooltip, work, 100)"model" must contain "tooltip, work"
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4709
- Thank you received: 2106
21 Mar 2023 09:42 #267218
by Aciera
Replied by Aciera on topic Vismach - The easist example
Yes the model must contain 'work' and 'tooltip'. Note though that usually you would not add the two to the same body. Here is an example:
#!/usr/bin/env python3
#imports
from vismach import *
import hal
#create the HAL component and pins
comp = hal.component("vismach-example")
comp.newpin("joint0", hal.HAL_FLOAT, hal.HAL_IN)
comp.ready()
#create the floor, tool and work
tooltip = Capture()
tool = CylinderZ(0, 1, 20, 1)
tool = Color([1,0,0,0],[tool])
tool = Collection([tooltip, tool])
tool = Translate([tool],0,0,150)
work = Capture()
part = Box(-50, -50, 0, 50, 50, 100)
part = Collection([work, part])
#create a top-level model
model = Collection([tool, part])
#Start the visualization
#main(model, tooltip, work)
main(model, tooltip, work, 400)Please Log in or Create an account to join the conversation.
- zz912
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 592
- Thank you received: 96
21 Mar 2023 10:43 #267221
by zz912
Replied by zz912 on topic Vismach - The easist example
So far I manage to create what I need.
But I absolutely do not understand what the tooltip and work is good for.
In manual is only:
But I absolutely do not understand what the tooltip and work is good for.
In manual is only:
- This is the command that makes it all happen, creates the display etc.
main(model, tooltip, work, size=10, hud=0, rotation_vectors=None, lat=0, lon=0)
- model should be a collection that contains all the machine parts.
- tooltip and work need to be created by to visualize their motion in the back plot.
Capture()
Seefor an example of how to connect the tool tip to a tool and the tool to the model.scaragui.py
- Either rotation_vectors or latitude/longitude can be used to set the original viewpoint and it is advisable to do as the default initial viewpoint is rather unhelpfully from immediately overhead.
- size sets the extent of the volume visualized in the initial view.
- hud refers to a head-up display of axis positions.
#!/usr/bin/env python3
#imports
from vismach import *
import hal
X0 = -300
#create the HAL component and pins
c = hal.component("tripteron-gui")
c.newpin("joint0", hal.HAL_FLOAT, hal.HAL_IN)
c.newpin("joint1", hal.HAL_FLOAT, hal.HAL_IN)
c.newpin("joint2", hal.HAL_FLOAT, hal.HAL_IN)
#create the floor, tool and work
floor = Box(-500, -100, -3, 500, 100, 0)
work = Capture()
tooltip = Capture()
#define colour
red = (1,.5,.5,0)
green = (.5,1,.5,0)
blue = (.5,.5,1,0)
#Build and assemble the model
carriage0 = Collection([Box(-30,-20,-3,30,20,3)])
carriage0 = Color(red,[carriage0])
carriage0 = Translate([carriage0],-100+X0,0,-5)
carriage0 = HalTranslate([carriage0], c, "joint0", 1, 0, 0)
carriage1 = Collection([Box(-30,-20,-3,30,20,3)])
carriage1 = Color(green,[carriage1])
carriage1 = Translate([carriage1],100+X0,-50,-5)
carriage1 = HalTranslate([carriage1], c, "joint1", 1, 0, 0)
carriage2 = Collection([Box(-30,-20,-3,30,20,3)])
carriage2 = Color(blue,[carriage2])
carriage2 = Translate([carriage2],100+X0,50,-5)
carriage2 = HalTranslate([carriage2], c, "joint2", 1, 0, 0)
head = Collection([
tooltip,
Box(-30,-30,0,30,30,-30)])
head = Translate([head],X0,0,-100)
#create a top-level model
model = Collection([floor, carriage0, carriage1, carriage2, head, tooltip, work])
#Start the visualization
main(model, tooltip, work, 1200, lat=-120, lon=30)
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4709
- Thank you received: 2106
21 Mar 2023 12:17 #267224
by Aciera
Replied by Aciera on topic Vismach - The easist example
As I understand it, 'tooltip' and 'work' are used by OpenGL for it's matrix transformations. The Backplot line in vismach shows the movment of the tooltip in reference to the work. This of course is only visible when there is a connection to a running linuxcnc instance with halpins.
The following user(s) said Thank You: zz912
Please Log in or Create an account to join the conversation.
- zz912
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 592
- Thank you received: 96
21 Mar 2023 12:27 #267225
by zz912
Replied by zz912 on topic Vismach - The easist example
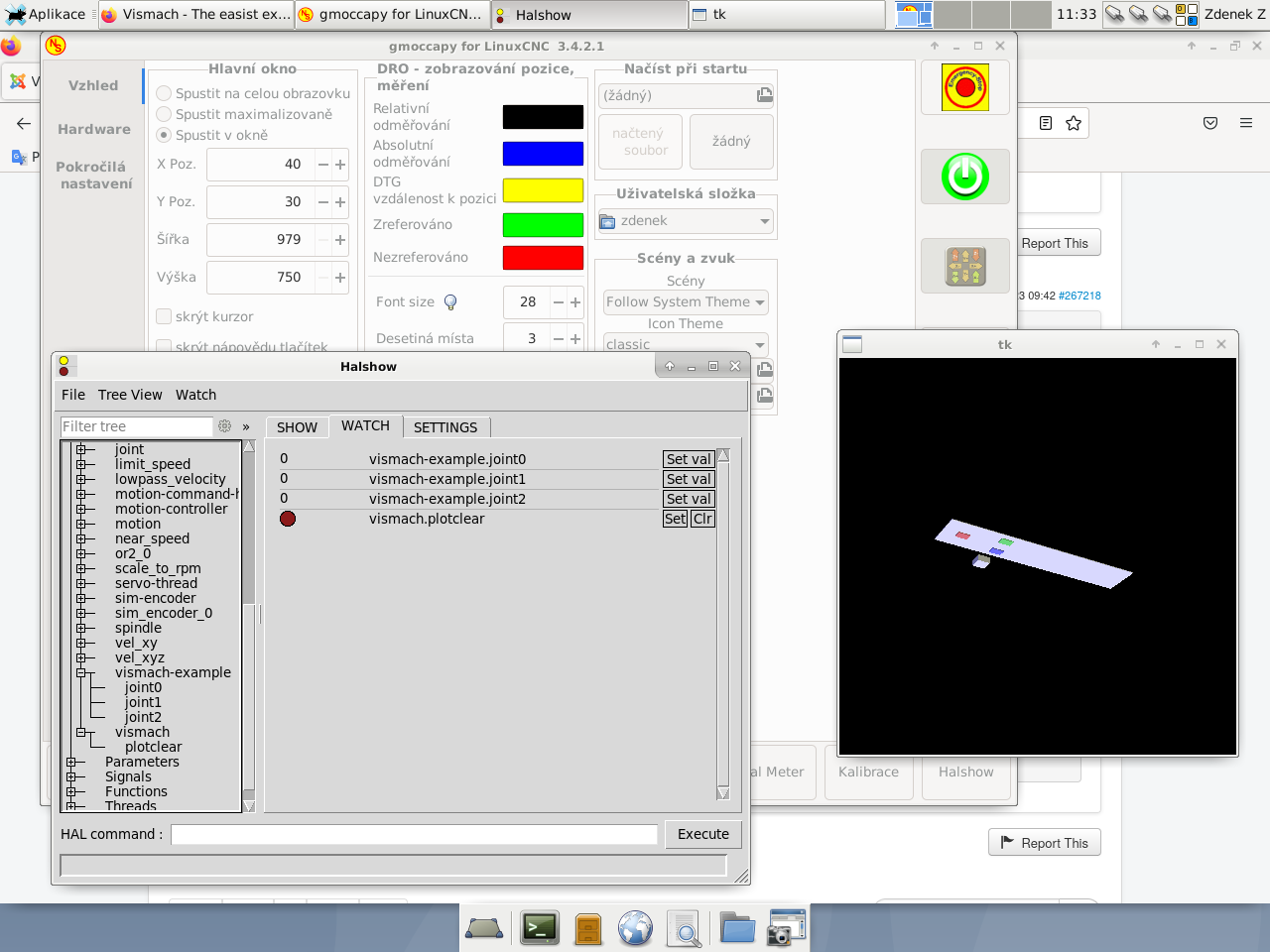
The problem is that 'tooltip' and 'work' do not create any HALpins. Look at the screenshot of my screen that I gave above.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4709
- Thank you received: 2106
21 Mar 2023 13:17 - 21 Mar 2023 13:18 #267228
by Aciera
Replied by Aciera on topic Vismach - The easist example
Why would you expect 'tooltip' and 'work' to create halpins? They are only for the vismach model internals.
Last edit: 21 Mar 2023 13:18 by Aciera.
The following user(s) said Thank You: zz912
Please Log in or Create an account to join the conversation.
- zz912
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 592
- Thank you received: 96
21 Mar 2023 16:39 #267236
by zz912
Replied by zz912 on topic Vismach - The easist example
Because you wrote:
This of course is only visible when there is a connection to a running linuxcnc instance with halpins.
Please Log in or Create an account to join the conversation.
Time to create page: 0.155 seconds