Problems with custom kinematics
- 6opbka
- Offline
- New Member
-

Less
More
- Posts: 1
- Thank you received: 0
03 Jun 2023 10:33 - 03 Jun 2023 10:38 #272809
by 6opbka
Problems with custom kinematics was created by 6opbka
Hello.
I have a master degree project that is connected to linuxCNC (I am developing a custom robot).
I have cartesian kinematics and Remote Center of Motion kinematics combined.
Everything moves perfectly etc.
However, there is one problem: RCM allows to change probe's orientation in 2 planes: X and Z. When I send the command to orientate the probe 60 degrees (for example) both joints move according to set speed. But when I tell the robot to change probe's orientation to -60 degrees, A joint requires to rotate 180 degrees and does it at around 360 degrees/min (incredibly slow) (C joint rotates at the set speed).
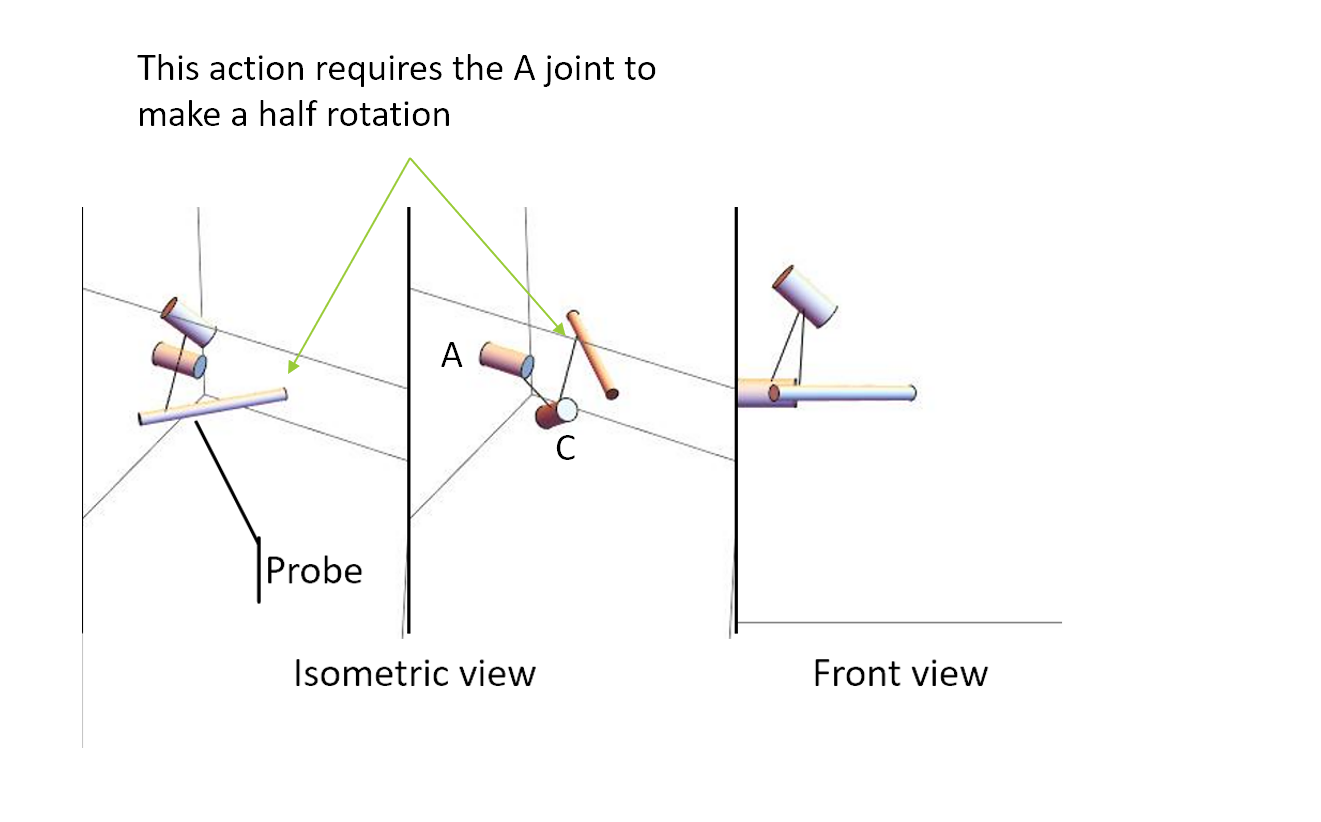
And so, when I change the probe's orientation from 60 to - 60 (or from 30 to - 30, doesn't matter), One joint moves at set speed, but the secondary joint needs to make a half rotation at very slow speed.
Changing speed variables in .ini file did nothing. When in joint mode, I can control the speed of both joints. It only occurs when applying kinematics.
is there a way to increase the speed of actuation?
Please help, if anyone encountered such a problem.
Sincerely
I have a master degree project that is connected to linuxCNC (I am developing a custom robot).
I have cartesian kinematics and Remote Center of Motion kinematics combined.
Everything moves perfectly etc.
However, there is one problem: RCM allows to change probe's orientation in 2 planes: X and Z. When I send the command to orientate the probe 60 degrees (for example) both joints move according to set speed. But when I tell the robot to change probe's orientation to -60 degrees, A joint requires to rotate 180 degrees and does it at around 360 degrees/min (incredibly slow) (C joint rotates at the set speed).
And so, when I change the probe's orientation from 60 to - 60 (or from 30 to - 30, doesn't matter), One joint moves at set speed, but the secondary joint needs to make a half rotation at very slow speed.
Changing speed variables in .ini file did nothing. When in joint mode, I can control the speed of both joints. It only occurs when applying kinematics.
is there a way to increase the speed of actuation?
Please help, if anyone encountered such a problem.
Sincerely
Attachments:
Last edit: 03 Jun 2023 10:38 by 6opbka.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19861
- Thank you received: 4636
10 Jun 2023 10:12 #273262
by andypugh
Replied by andypugh on topic Problems with custom kinematics
Is there any associated linear movement?
I am not sure how it works when kinematics is involved, but the calculations for combined linear and rotary motons are different from pure rotary, and can sometimes end up doing unexpected things.
Do you get the same result if you perform the motion in G93 mode?
(If using G93 then you may need to make sure that you are using an up-to-date LinuxCNC: github.com/LinuxCNC/linuxcnc/issues/2410
I am not sure how it works when kinematics is involved, but the calculations for combined linear and rotary motons are different from pure rotary, and can sometimes end up doing unexpected things.
Do you get the same result if you perform the motion in G93 mode?
(If using G93 then you may need to make sure that you are using an up-to-date LinuxCNC: github.com/LinuxCNC/linuxcnc/issues/2410
Please Log in or Create an account to join the conversation.
Time to create page: 0.138 seconds