- LinuxCNC
- General LinuxCNC Questions
- Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
- mBender
- Offline
- Premium Member
-

Less
More
- Posts: 133
- Thank you received: 15
04 Dec 2023 03:23 - 05 Dec 2023 02:21 #287158
by mBender
Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed was created by mBender
Hi, I have a Gantry CNC with 4 Motors on X Y Y and Z. Everything works but, I have a question regarding the jog of the Y Axis when not homed.
The joints are
Joint 0 Z
Homing Sequence 0
Joint 1 Y
Homing Sequence -1
Joint 2 Y
Homing Sequence -1
Joint 3 X
Homing Sequence 1
If I home the machine, first Z then X and Y home together. If the machine is not homed, I can not jog with the X axis. LinuxCNC says an error because of the Y is synced and in the same sequence.
As a workaround I have increased the Y sequence to -2 on both joints. Now, I can jog X when not homed. Down side homing goes Z then X then Y.
Is there a way that Y gets locked from jogging when not homed and in the home cycle X and Y work together?
Mike
The joints are
Joint 0 Z
Homing Sequence 0
Joint 1 Y
Homing Sequence -1
Joint 2 Y
Homing Sequence -1
Joint 3 X
Homing Sequence 1
If I home the machine, first Z then X and Y home together. If the machine is not homed, I can not jog with the X axis. LinuxCNC says an error because of the Y is synced and in the same sequence.
As a workaround I have increased the Y sequence to -2 on both joints. Now, I can jog X when not homed. Down side homing goes Z then X then Y.
Is there a way that Y gets locked from jogging when not homed and in the home cycle X and Y work together?
Mike
Last edit: 05 Dec 2023 02:21 by mBender. Reason: Mixed up X and Y axis in the first sentence.
Please Log in or Create an account to join the conversation.
- rodw
-

- Away
- Platinum Member
-

Less
More
- Posts: 11967
- Thank you received: 4078
04 Dec 2023 05:18 #287161
by rodw
Replied by rodw on topic Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
You need to home a joint axis before it can be jogged. Correct workflow is power up, home all, then jog.
I have never tried to home a joint axis with another axis. MAybe it will lif you make X = +2
I have never tried to home a joint axis with another axis. MAybe it will lif you make X = +2
Please Log in or Create an account to join the conversation.
- phillc54
-

- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
04 Dec 2023 05:30 #287163
by phillc54
Replied by phillc54 on topic Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
A bit of HAL work can allow jogging before homing on synchronised joints.
linuxcnc.org/docs/2.9/html/config/ini-ho...l#_inhibiting_homing
linuxcnc.org/docs/2.9/html/config/ini-ho...l#_inhibiting_homing
Please Log in or Create an account to join the conversation.
- mBender
- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 15
05 Dec 2023 02:23 #287235
by mBender
Replied by mBender on topic Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
@phillc54 Awesome, that was what I was looking for. Will try that, thank you.
@rodw You are right, but there are reasons when I just want to move the machine from the park position a little bit, without homing,...
@rodw You are right, but there are reasons when I just want to move the machine from the park position a little bit, without homing,...
Please Log in or Create an account to join the conversation.
- mBender
- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 15
14 Dec 2023 02:06 #288088
by mBender
Replied by mBender on topic Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
@phillc54: That worked partly. I am followed the link and implemented that in the machine. I am now able to jog trigger the signal on the GUI and jog the x and y axis. I will update the manual, since there are a few informations missing, but I figured it out.
My problem now is: When I jog the Y axis with the 2 synced motors when they are NOT homed, only one motor moves when I click on the Y + or - button in the GUI. I believe I have to implement another button to move both motors at the same time, but not sure.
My problem now is: When I jog the Y axis with the 2 synced motors when they are NOT homed, only one motor moves when I click on the Y + or - button in the GUI. I believe I have to implement another button to move both motors at the same time, but not sure.
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
14 Dec 2023 03:03 #288090
by phillc54
Replied by phillc54 on topic Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
You would need to connect both the joints for Y to the Y jog button because you would normally want them both to jog together.
Please Log in or Create an account to join the conversation.
- mBender
- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 15
15 Dec 2023 01:56 #288181
by mBender
Replied by mBender on topic Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
Just checked the hal file and the machine hal configuration, I can not find where the Buttons are connected to anything. Do you know where to find them?
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
15 Dec 2023 03:39 - 15 Dec 2023 03:40 #288183
by phillc54
Replied by phillc54 on topic Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
You won't be able to use the existing GUI buttons for synchronous unhomed jogging unless you rewrite/hijack some of the GUI code.
It is best done with an MPG, as all jogging really is.
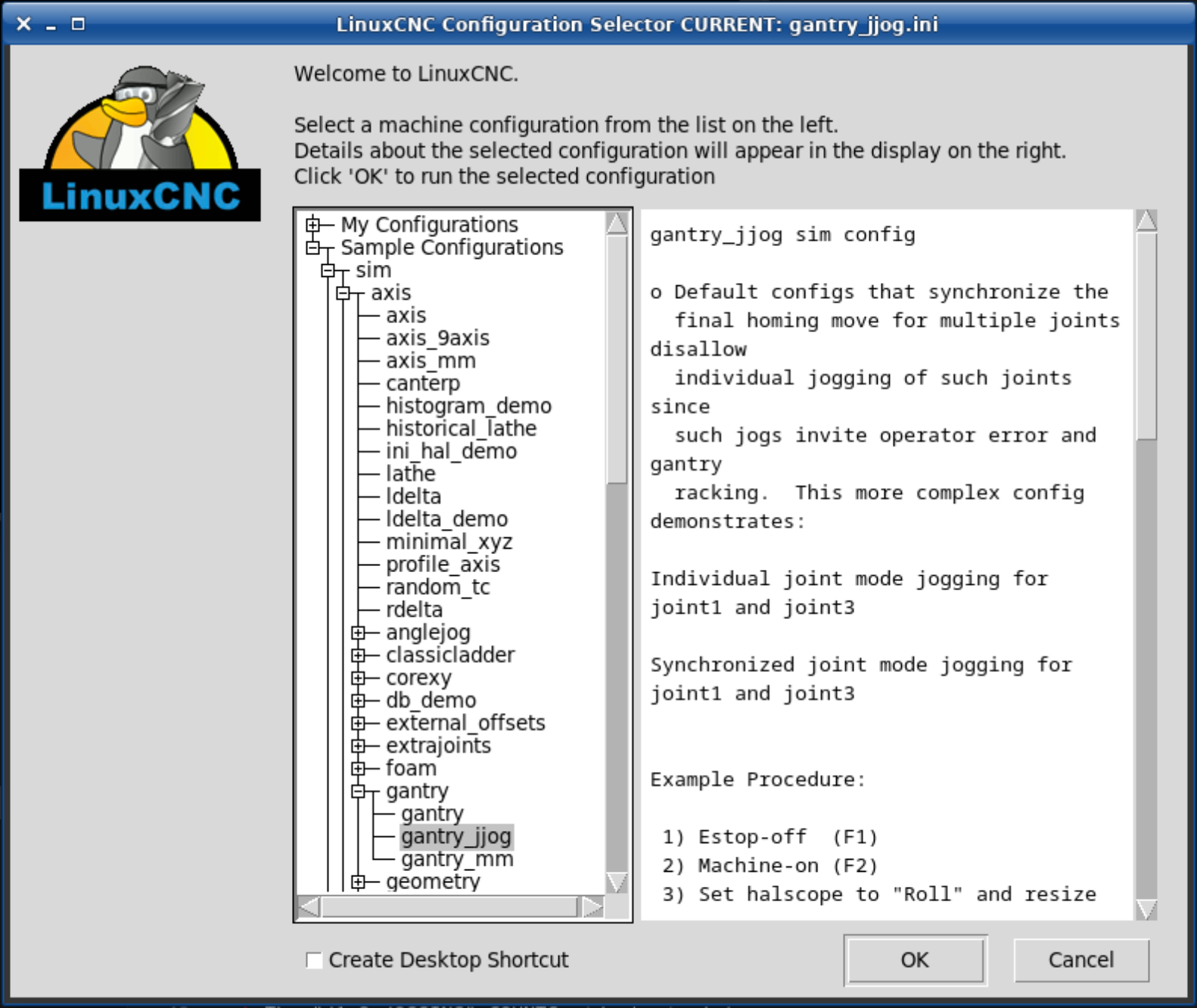
You could probably add a button in a panel to jog the two joints, the simulation axis/gantry/gantry_jjog would be a good starting point.
Edit: What GUI are you using?
It is best done with an MPG, as all jogging really is.
You could probably add a button in a panel to jog the two joints, the simulation axis/gantry/gantry_jjog would be a good starting point.
Warning: Spoiler!
Edit: What GUI are you using?
Attachments:
Last edit: 15 Dec 2023 03:40 by phillc54.
Please Log in or Create an account to join the conversation.
- mBender
- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 15
16 Dec 2023 02:11 #288280
by mBender
Replied by mBender on topic Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
I am using the AXIS gui. I looked at this gantry_jjog. I only found that in the documentation of LinuxCNC 2.5. I am using the trivkins. I looked in the manpage and found that I had to add kinstype=b to the Ini file. Now I can switch with the $ shortcut between XYZ axis jogging and joggining for the individual joints. A step ahead!
This is a step in the right direction. I tried to find the signals which I need to connect now in joint mode to move joint 1 and 2 at the same time. I guess it must be something with Joing count and joint scale. I searched for all, but can not find anything which changes when I use the regular axis +/- buttons.
This is a step in the right direction. I tried to find the signals which I need to connect now in joint mode to move joint 1 and 2 at the same time. I guess it must be something with Joing count and joint scale. I searched for all, but can not find anything which changes when I use the regular axis +/- buttons.
Please Log in or Create an account to join the conversation.
- rodw
-
- Away
- Platinum Member
-
Less
More
- Posts: 11967
- Thank you received: 4078
16 Dec 2023 02:54 #288284
by rodw
Replied by rodw on topic Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
Note Homing changed significantly with 2.8 so stuff on 2.5 is likely not relevant.
I think G10 works on the current G5X space. You may have G54 set in your preamble
I think G10 works on the current G5X space. You may have G54 set in your preamble
Please Log in or Create an account to join the conversation.
- LinuxCNC
- General LinuxCNC Questions
- Gantry with 2 Synced Y Axis motors, X axis jogging not possible when not homed
Time to create page: 1.643 seconds