MesaCT configuration of axis limits
- slowpoke
- Offline
- Elite Member
-

Less
More
- Posts: 224
- Thank you received: 28
01 Mar 2024 01:55 #294814
by slowpoke
MesaCT configuration of axis limits was created by slowpoke
I now have the X axis moving with LinuxCNC Axis. I'm using ac servos that accept step and direction pulses like a stepper. I'm using a Mesa 7195t driver board.
Ball screws are DFU2005mm so 5mm pitch or 0.1969" per rev
Servos (direct drive) are setup for 1000 pulses per rev, so 0.000197 inches per pulse
Max input rate at Servo driver is 500kHz
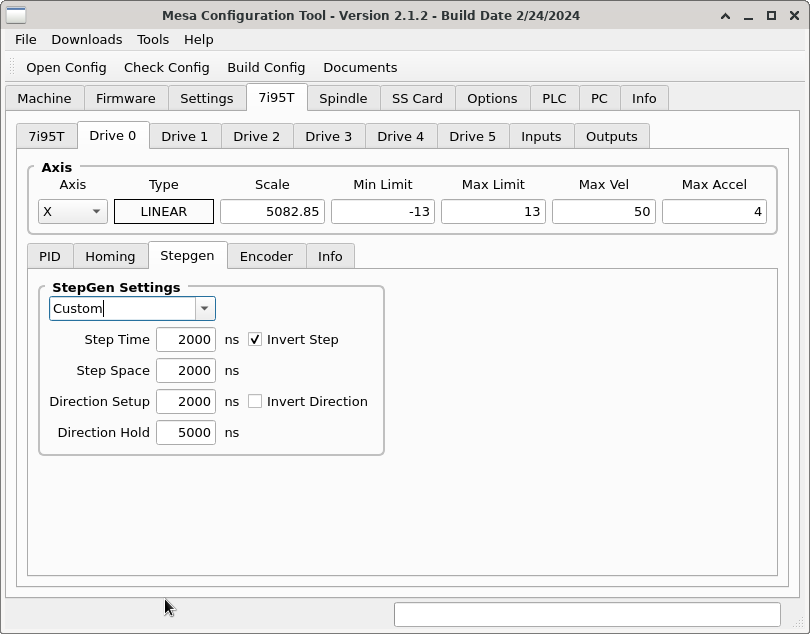
I have the scale in Drive0 setup for 5082.85, and this yields correct displacement.
Speed limit (signaling wise) should be (500000/1000)*0.1969 = 98.45'' per second, so really really fast
In the Axis setup of MesaCT:
1) I'm assuming Min and Max limits are for displacement limits for example -15" and +15" is that correct?
2) Based on my calculations above Max Vel should be 98.45, but when I enter say 50, I get the following error:
hm2/hm2_7i95.0: stepgen.00.maxvel is too big for current step timings and position-scale. Clipping to max possible.
So clearly I'm misinterpreting the settings, or don't understand something.
I did move the table at F10, as well as F100 (F100 is quite fast)
I also did a g0 x 10 and the table moves at about 1" per second, plenty fast for me.
Please advise.
Ball screws are DFU2005mm so 5mm pitch or 0.1969" per rev
Servos (direct drive) are setup for 1000 pulses per rev, so 0.000197 inches per pulse
Max input rate at Servo driver is 500kHz
I have the scale in Drive0 setup for 5082.85, and this yields correct displacement.
Speed limit (signaling wise) should be (500000/1000)*0.1969 = 98.45'' per second, so really really fast
In the Axis setup of MesaCT:
1) I'm assuming Min and Max limits are for displacement limits for example -15" and +15" is that correct?
2) Based on my calculations above Max Vel should be 98.45, but when I enter say 50, I get the following error:
hm2/hm2_7i95.0: stepgen.00.maxvel is too big for current step timings and position-scale. Clipping to max possible.
So clearly I'm misinterpreting the settings, or don't understand something.
I did move the table at F10, as well as F100 (F100 is quite fast)
I also did a g0 x 10 and the table moves at about 1" per second, plenty fast for me.
Please advise.
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17958
- Thank you received: 5263
01 Mar 2024 02:03 #294815
by PCW
Replied by PCW on topic MesaCT configuration of axis limits
The maximum step rate is 1/(steppace+steptime) so
with the current values of 2000 ns (2 usec) for each, you have
a physical limit of 1/(4 usec) = 250 KHz.
You would need to reduce the steptime and or stepspace
to increase the maximum possible step rate.
with the current values of 2000 ns (2 usec) for each, you have
a physical limit of 1/(4 usec) = 250 KHz.
You would need to reduce the steptime and or stepspace
to increase the maximum possible step rate.
The following user(s) said Thank You: slowpoke
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
07 Mar 2024 23:24 - 07 Mar 2024 23:27 #295433
by slowpoke
I'm trying to understand the following error:
hm2/hm2_7i95.0:stepgen.01.maxvel is too big for current step timings & position-scale, clipping to max possible.
My calculation is as follows:
Step Time, and Step Space are both set to 1us, so 500kHz max
Servo is configured for 10,000 step pulses per revolution
Direct drive to ballscrew, so 1 revolution = 0.1969 inches of linear displacement or 1 inch = 5.079 revolutions
96 inches per minute = 1.60 inches per second
1.6 * 5.079 * 10,000 = 81264 Hz, so well below the 500kHz maximum rate
There must be something else I'm missing?
I tried turning down the present ~50 pulses per mil to 10 for 0.0001 resolution, same error.
I would just like to understand what limit I'm actually hitting?
Replied by slowpoke on topic MesaCT configuration of axis limits
The maximum step rate is 1/(steppace+steptime) so
with the current values of 2000 ns (2 usec) for each, you have
a physical limit of 1/(4 usec) = 250 KHz.
You would need to reduce the steptime and or stepspace
to increase the maximum possible step rate.
I'm trying to understand the following error:
hm2/hm2_7i95.0:stepgen.01.maxvel is too big for current step timings & position-scale, clipping to max possible.
My calculation is as follows:
Step Time, and Step Space are both set to 1us, so 500kHz max
Servo is configured for 10,000 step pulses per revolution
Direct drive to ballscrew, so 1 revolution = 0.1969 inches of linear displacement or 1 inch = 5.079 revolutions
96 inches per minute = 1.60 inches per second
1.6 * 5.079 * 10,000 = 81264 Hz, so well below the 500kHz maximum rate
There must be something else I'm missing?
I tried turning down the present ~50 pulses per mil to 10 for 0.0001 resolution, same error.
I would just like to understand what limit I'm actually hitting?
Last edit: 07 Mar 2024 23:27 by slowpoke.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17958
- Thank you received: 5263
08 Mar 2024 01:26 #295435
by PCW
Replied by PCW on topic MesaCT configuration of axis limits
Can you post your hal and ini files?
Please Log in or Create an account to join the conversation.
- JT
-

- Offline
- Administrator
-

Less
More
- Posts: 1092
- Thank you received: 582
08 Mar 2024 10:56 #295444
by JT
Replied by JT on topic MesaCT configuration of axis limits
This looks like something I need to check for in Mesa CT.
JT
JT
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
08 Mar 2024 13:30 #295454
by slowpoke
Replied by slowpoke on topic MesaCT configuration of axis limits
Please see attached, note I bumped down the Y axis steps from 10000 to 2000 however I still get the same error.Can you post your hal and ini files?
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17958
- Thank you received: 5263
08 Mar 2024 14:30 #295458
by PCW
Replied by PCW on topic MesaCT configuration of axis limits
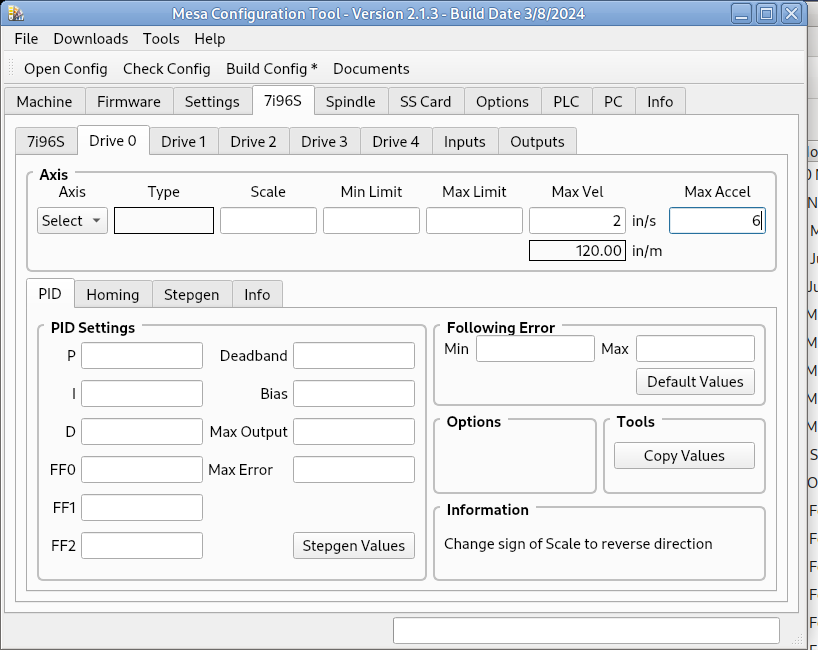
Looks like a IPM/IPS confusion
You have the maximum velocity set to 96 IPS (a bit scary...)
96 IPM would be 1.6 IPS
A decent starting acceleration value would be 5X
the velocity setting so acceleration to full speed takes
0.2 seconds = 8
[JOINT_0]
CARD = 0
TAB = 0
AXIS = X
MIN_LIMIT = -9
MAX_LIMIT = 9
MAX_VELOCITY = 96 <<<<<<<<<<<<<<
MAX_ACCELERATION = 2
TYPE = LINEAR
SCALE = 5095.18544
You have the maximum velocity set to 96 IPS (a bit scary...)
96 IPM would be 1.6 IPS
A decent starting acceleration value would be 5X
the velocity setting so acceleration to full speed takes
0.2 seconds = 8
[JOINT_0]
CARD = 0
TAB = 0
AXIS = X
MIN_LIMIT = -9
MAX_LIMIT = 9
MAX_VELOCITY = 96 <<<<<<<<<<<<<<
MAX_ACCELERATION = 2
TYPE = LINEAR
SCALE = 5095.18544
The following user(s) said Thank You: slowpoke
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
08 Mar 2024 17:04 #295462
by slowpoke
I'm really happy with my decisions so far:
Linux vs. Windows, no explanation required.
ac servos vs. steppers, fast, powerful and silent.
Mesa vs. other options, seems well thought out with room to grow.
Pretty soon this thing will be all singing all dancing!
Replied by slowpoke on topic MesaCT configuration of axis limits
That was it. Thanks again!Looks like a IPM/IPS confusion
You have the maximum velocity set to 96 IPS (a bit scary...)
96 IPM would be 1.6 IPS
A decent starting acceleration value would be 5X
the velocity setting so acceleration to full speed takes
0.2 seconds = 8
5095.18544
I'm really happy with my decisions so far:
Linux vs. Windows, no explanation required.
ac servos vs. steppers, fast, powerful and silent.
Mesa vs. other options, seems well thought out with room to grow.
Pretty soon this thing will be all singing all dancing!
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- JT
-
- Offline
- Administrator
-
Less
More
- Posts: 1092
- Thank you received: 582
08 Mar 2024 20:42 #295475
by JT
Replied by JT on topic MesaCT configuration of axis limits
I've improved MesaCT to show the units for velocity settings based on your experience . So thanks for helping me improve MesaCT.
JT
JT
Attachments:
The following user(s) said Thank You: tommylight, slowpoke
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
09 Mar 2024 22:19 #295541
by slowpoke
Replied by slowpoke on topic MesaCT configuration of axis limits
JT,
Thank you and I'm a so glad I decided to go the LinuxCNC-Mesa route!
Thank you and I'm a so glad I decided to go the LinuxCNC-Mesa route!
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
Time to create page: 0.194 seconds