Spindle speed via SuperPID
- x26iclone
- Offline
- New Member
-

Less
More
- Posts: 18
- Thank you received: 4
12 Apr 2024 00:03 - 12 Apr 2024 00:04 #298035
by x26iclone
Spindle speed via SuperPID was created by x26iclone
Hoping for some help.
I was using a Dell Optiplex 780 SFF with a 5i25 a G540 and a SuperPID. All worked well until the G540 died. I replaced it with some sainsmart bobs and stepperonline motors/drivers. All worked great until the Dell died. I went with a RPi4 and 7c81 with mx3660x2d firmware. I had to remove the relay in order to use the DB25-14 pin as pwm. The output on that pin ranges from 0.90v to 5v when I click the + for the spindle speed in axis. When I do a M3 S8000 the rpm is something like 15000 and the pin voltage is something like 1.7v. I have the pwm_frequncy set to 50 as I believe is needed. Whats the best way to calibrate the spindle?
Thanks for any help.
I can try to upload my configs if needed.
I was using a Dell Optiplex 780 SFF with a 5i25 a G540 and a SuperPID. All worked well until the G540 died. I replaced it with some sainsmart bobs and stepperonline motors/drivers. All worked great until the Dell died. I went with a RPi4 and 7c81 with mx3660x2d firmware. I had to remove the relay in order to use the DB25-14 pin as pwm. The output on that pin ranges from 0.90v to 5v when I click the + for the spindle speed in axis. When I do a M3 S8000 the rpm is something like 15000 and the pin voltage is something like 1.7v. I have the pwm_frequncy set to 50 as I believe is needed. Whats the best way to calibrate the spindle?
Thanks for any help.
I can try to upload my configs if needed.
Last edit: 12 Apr 2024 00:04 by x26iclone.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17917
- Thank you received: 5246
12 Apr 2024 01:12 #298040
by PCW
Replied by PCW on topic Spindle speed via SuperPID
The 5ABOB firmware should match the Sainsmart BOB
(the common one has PWM on pin 1)
Are you using the analog 0 to 10V output?
The analog out seems OK with a quick test:
% FS PWM VOLTAGE
0 0.026
10 0.944
20 1.862
30 2.794
40 3.744
50 4.706
60 5.686
70 6.681
80 7.692
90 8.720
100 9.754
(the PWM output pin needs to be inverted as the BOB PWM input is active low)
test conditions: 12V on 12-24V power 50 Hz PWM
(the common one has PWM on pin 1)
Are you using the analog 0 to 10V output?
The analog out seems OK with a quick test:
% FS PWM VOLTAGE
0 0.026
10 0.944
20 1.862
30 2.794
40 3.744
50 4.706
60 5.686
70 6.681
80 7.692
90 8.720
100 9.754
(the PWM output pin needs to be inverted as the BOB PWM input is active low)
test conditions: 12V on 12-24V power 50 Hz PWM
Please Log in or Create an account to join the conversation.
- x26iclone
- Offline
- New Member
-
Less
More
- Posts: 18
- Thank you received: 4
14 Apr 2024 03:59 #298215
by x26iclone
Replied by x26iclone on topic Spindle speed via SuperPID
Thanks for the reply and sorry for the late response.
The reason I'm using the mx3660x2d firmware is according the docs for the bobs I have pin one is enable, see pic.
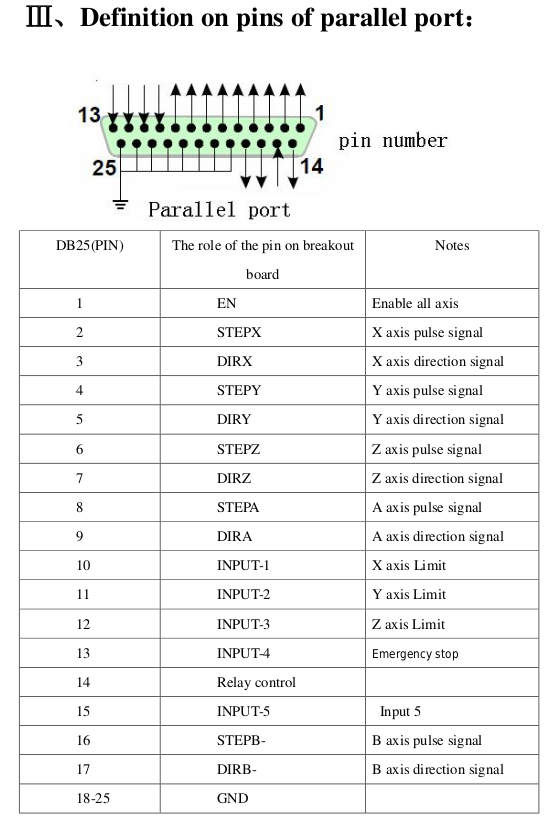
I'm using 0 - 5v out. I've been doing a lot of messing around with it and can't seem to get the M3 Sxxx to match what the SuperPID displays.
I've switched to qtdragon from axis due to a glade error when adding a spindle tab. The spindle speed in qtdragon matches the SuperPID display.
I believe this is my last ini and hal before giving up.
======================================================================
# Generated by PNCconf at Sat Apr 13 10:38:01 2024
# Using LinuxCNC version: Master (2.9)
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
[EMC]
MACHINE = MuttCNC_No-Limits_RPi4
DEBUG = 0
VERSION = 1.1
[DISPLAY]
DISPLAY = qtvcp qtdragon
PREFERENCE_FILE_PATH = WORKINGFOLDER/qtdragon.pref
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_0_OVERRIDE = 1.000000
MIN_SPINDLE_0_OVERRIDE = 0.500000
DEFAULT_SPINDLE_0_SPEED = 500
MIN_SPINDLE_0_SPEED = 100
MAX_SPINDLE_0_SPEED = 2500
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/cnc/linuxcnc/nc_files
INCREMENTS = 5mm 1mm .5mm .1mm .05mm .01mm .005mm
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 6.000000
MAX_LINEAR_VELOCITY = 158.333333
MIN_LINEAR_VELOCITY = 0.500000
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
CYCLE_TIME = 100
[MDI_COMMAND_LIST]
MDI_COMMAND = G0 Z0;X0 Y0
MDI_COMMAND = G53 G0 Z0;G53 G0 X0 Y0
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
RS274NGC_STARTUP_CODE = G21 G40 G90 G94 G97 G64 P0.025
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
SERVO_PERIOD = 1000000
[HMOT]
CARD0=hm2_7c81.0
[HAL]
HALUI = halui
HALFILE = MuttCNC_No-Limits_RPi4.hal
HALFILE = custom.hal
POSTGUI_HALFILE = qtvcp_postgui.hal
POSTGUI_HALFILE = custom_postgui.hal
SHUTDOWN = shutdown.hal
[HALUI]
[KINS]
JOINTS = 3
KINEMATICS = trivkins coordinates=XYZ
[TRAJ]
COORDINATES = XYZ
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
DEFAULT_LINEAR_VELOCITY = 20.83
MAX_LINEAR_VELOCITY = 208.33
POSITION_FILE = position.txt
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
#******************************************
[AXIS_X]
MAX_VELOCITY = 208.33333333333334
MAX_ACCELERATION = 1150.0
MIN_LIMIT = -0.0
MAX_LIMIT = 785.0
[JOINT_0]
TYPE = LINEAR
HOME = 2.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 208.33333333333334
MAX_ACCELERATION = 1150.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 260.42
STEPGEN_MAXACCEL = 1437.5
P = 1000
I = 0
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 0
# these are in nanoseconds
DIRSETUP = 20000
DIRHOLD = 20000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 160.9
MIN_LIMIT = -0.0
MAX_LIMIT = 785.0
HOME_OFFSET = 2.0
HOME_SEQUENCE = 2
#******************************************
#******************************************
[AXIS_Y]
MAX_VELOCITY = 208.33333333333334
MAX_ACCELERATION = 1150.0
MIN_LIMIT = -0.0
MAX_LIMIT = 283.0
[JOINT_1]
TYPE = LINEAR
HOME = 2.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 208.33333333333334
MAX_ACCELERATION = 1150.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 260.42
STEPGEN_MAXACCEL = 1437.5
P = 1000
I = 0
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 159.1
MIN_LIMIT = -0.0
MAX_LIMIT = 283.0
HOME_OFFSET = 2.0
HOME_SEQUENCE = 3
#******************************************
#******************************************
[AXIS_Z]
MAX_VELOCITY = 46.666666666666664
MAX_ACCELERATION = 250.0
MIN_LIMIT = -150.0
MAX_LIMIT = 0.0
[JOINT_2]
TYPE = LINEAR
HOME = -2.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 46.666666666666664
MAX_ACCELERATION = 250.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 58.33
STEPGEN_MAXACCEL = 312.5
P = 1000
I = 0
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 0
# these are in nanoseconds
DIRSETUP = 20000
DIRHOLD = 20000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = -804.2
MIN_LIMIT = -150.0
MAX_LIMIT = 0.0
HOME_OFFSET = -2.0
HOME_SEQUENCE = 1
#******************************************
[SPINDLE_0]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 25000.0
ENCODER_SCALE = 1
OUTPUT_SCALE = 50000
OUTPUT_MIN_LIMIT = 0
OUTPUT_MAX_LIMIT = 25000.0
======================================================================
======================================================================
# Generated by PNCconf at Sat Apr 13 10:38:01 2024
# Using LinuxCNC version: Master (2.9)
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_rpspi config="firmware=hm2/7c81/MX3660X2.BIT num_encoders=2 num_pwmgens=2 num_stepgens=8 sserial_port_0=00xxxxxx"
setp [HMOT](CARD0).pwmgen.pwm_frequency 50
setp [HMOT](CARD0).pwmgen.pdm_frequency 6000000
setp [HMOT](CARD0).watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
loadrt scale names=scale.gear
loadrt near
loadrt mux16 names=ratio_select
addf [HMOT](CARD0).read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf ratio_select servo-thread
addf scale.gear servo-thread
addf near.0 servo-thread
addf [HMOT](CARD0).write servo-thread
setp [HMOT](CARD0).dpll.01.timer-us -50
setp [HMOT](CARD0).stepgen.timer-number 1
# external output signals
# --- MACHINE-IS-ENABLED ---
setp [HMOT](CARD0).gpio.000.is_output true
net machine-is-enabled => [HMOT](CARD0).gpio.000.out
setp [HMOT](CARD0).gpio.000.invert_output true
# --- MACHINE-IS-ENABLED ---
setp [HMOT](CARD0).gpio.019.is_output true
net machine-is-enabled => [HMOT](CARD0).gpio.019.out
setp [HMOT](CARD0).gpio.019.invert_output true
# --- COOLANT-FLOOD ---
setp [HMOT](CARD0).gpio.039.is_output true
net coolant-flood => [HMOT](CARD0).gpio.039.out
# --- COOLANT-MIST ---
setp [HMOT](CARD0).gpio.043.is_output true
net coolant-mist => [HMOT](CARD0).gpio.043.out
# --- SPINDLE-ENABLE ---
setp [HMOT](CARD0).gpio.045.is_output true
net spindle-enable => [HMOT](CARD0).gpio.045.out
setp [HMOT](CARD0).gpio.045.invert_output true
# external input signals
# --- ESTOP-EXT ---
net estop-ext <= [HMOT](CARD0).gpio.003.in
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.x.maxerror 0.012700
net x-index-enable => pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Step Gen signals/setup
setp [HMOT](CARD0).stepgen.04.dirsetup [JOINT_0]DIRSETUP
setp [HMOT](CARD0).stepgen.04.dirhold [JOINT_0]DIRHOLD
setp [HMOT](CARD0).stepgen.04.steplen [JOINT_0]STEPLEN
setp [HMOT](CARD0).stepgen.04.stepspace [JOINT_0]STEPSPACE
setp [HMOT](CARD0).stepgen.04.position-scale [JOINT_0]STEP_SCALE
setp [HMOT](CARD0).stepgen.04.step_type 0
setp [HMOT](CARD0).stepgen.04.control-type 1
setp [HMOT](CARD0).stepgen.04.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp [HMOT](CARD0).stepgen.04.maxvel [JOINT_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output => [HMOT](CARD0).stepgen.04.velocity-cmd
net x-pos-fb <= [HMOT](CARD0).stepgen.04.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => [HMOT](CARD0).stepgen.04.enable
# ---setup home / limit switch signals---
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.y.maxerror 0.012700
net y-index-enable => pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# Step Gen signals/setup
setp [HMOT](CARD0).stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp [HMOT](CARD0).stepgen.01.dirhold [JOINT_1]DIRHOLD
setp [HMOT](CARD0).stepgen.01.steplen [JOINT_1]STEPLEN
setp [HMOT](CARD0).stepgen.01.stepspace [JOINT_1]STEPSPACE
setp [HMOT](CARD0).stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp [HMOT](CARD0).stepgen.01.step_type 0
setp [HMOT](CARD0).stepgen.01.control-type 1
setp [HMOT](CARD0).stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp [HMOT](CARD0).stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-output => [HMOT](CARD0).stepgen.01.velocity-cmd
net y-pos-fb <= [HMOT](CARD0).stepgen.01.position-fb
net y-pos-fb => joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
net y-enable => [HMOT](CARD0).stepgen.01.enable
# ---setup home / limit switch signals---
net y-home-sw => joint.1.home-sw-in
net y-neg-limit => joint.1.neg-lim-sw-in
net y-pos-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.z.maxerror 0.012700
net z-index-enable => pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp [HMOT](CARD0).stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp [HMOT](CARD0).stepgen.02.dirhold [JOINT_2]DIRHOLD
setp [HMOT](CARD0).stepgen.02.steplen [JOINT_2]STEPLEN
setp [HMOT](CARD0).stepgen.02.stepspace [JOINT_2]STEPSPACE
setp [HMOT](CARD0).stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp [HMOT](CARD0).stepgen.02.step_type 0
setp [HMOT](CARD0).stepgen.02.control-type 1
setp [HMOT](CARD0).stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp [HMOT](CARD0).stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-vel-cmd <= joint.2.vel-cmd
net z-output => [HMOT](CARD0).stepgen.02.velocity-cmd
net z-pos-fb <= [HMOT](CARD0).stepgen.02.position-fb
net z-pos-fb => joint.2.motor-pos-fb
net z-enable <= joint.2.amp-enable-out
net z-enable => [HMOT](CARD0).stepgen.02.enable
# ---setup home / limit switch signals---
net z-home-sw => joint.2.home-sw-in
net z-neg-limit => joint.2.neg-lim-sw-in
net z-pos-limit => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
net ratio_select.out pid.s.maxoutput
setp pid.s.error-previous-target true
net spindle-index-enable => pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm-abs => pid.s.command
net spindle-vel-fb-rpm-abs => pid.s.feedback
net spindle-pid-out pid.s.output => scale.gear.in
net gear-ratio ratio_select.out-f => scale.gear.gain
setp ratio_select.in00 0.000200
setp ratio_select.in01 0.000040
net gear-select-a => ratio_select.sel0
net spindle-output <= scale.gear.out
# ---PWM Generator signals/setup---
setp [HMOT](CARD0).pwmgen.01.output-type 1
setp [HMOT](CARD0).pwmgen.01.scale [SPINDLE_0]OUTPUT_SCALE
setp hm2_7c81.0.gpio.020.invert_output true
net spindle-output => [HMOT](CARD0).pwmgen.01.value
net spindle-enable => [HMOT](CARD0).pwmgen.01.enable
# ---Encoder feedback signals/setup---
setp [HMOT](CARD0).encoder.01.counter-mode 1
setp [HMOT](CARD0).encoder.01.filter 1
setp [HMOT](CARD0).encoder.01.index-invert 0
setp [HMOT](CARD0).encoder.01.index-mask 0
setp [HMOT](CARD0).encoder.01.index-mask-invert 0
setp [HMOT](CARD0).encoder.01.scale [SPINDLE_0]ENCODER_SCALE
net spindle-revs <= [HMOT](CARD0).encoder.01.position
net spindle-vel-fb-rps <= [HMOT](CARD0).encoder.01.velocity
net spindle-vel-fb-rpm <= [HMOT](CARD0).encoder.01.velocity-rpm
net spindle-index-enable <=> [HMOT](CARD0).encoder.01.index-enable
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
net spindle-vel-cmd-rps => near.0.in1
net spindle-vel-fb-rps => near.0.in2
net spindle-at-speed <= near.0.out
setp near.0.scale 1.000000
setp near.0.difference 3.333333
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-ext => iocontrol.0.emc-enable-in
# ---manual tool change signals---
net tool-change-request <= iocontrol.0.tool-change
net tool-change-confirmed => iocontrol.0.tool-changed
net tool-number <= iocontrol.0.tool-prep-number
# ---ignore tool prepare requests---
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
======================================================================
Any change I made was through pncconf to keep me from making a change while screwing around that I would later forget about and be scratching my head if something was working...
Thanks.
The reason I'm using the mx3660x2d firmware is according the docs for the bobs I have pin one is enable, see pic.
I'm using 0 - 5v out. I've been doing a lot of messing around with it and can't seem to get the M3 Sxxx to match what the SuperPID displays.
I've switched to qtdragon from axis due to a glade error when adding a spindle tab. The spindle speed in qtdragon matches the SuperPID display.
I believe this is my last ini and hal before giving up.
======================================================================
# Generated by PNCconf at Sat Apr 13 10:38:01 2024
# Using LinuxCNC version: Master (2.9)
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
[EMC]
MACHINE = MuttCNC_No-Limits_RPi4
DEBUG = 0
VERSION = 1.1
[DISPLAY]
DISPLAY = qtvcp qtdragon
PREFERENCE_FILE_PATH = WORKINGFOLDER/qtdragon.pref
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_0_OVERRIDE = 1.000000
MIN_SPINDLE_0_OVERRIDE = 0.500000
DEFAULT_SPINDLE_0_SPEED = 500
MIN_SPINDLE_0_SPEED = 100
MAX_SPINDLE_0_SPEED = 2500
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/cnc/linuxcnc/nc_files
INCREMENTS = 5mm 1mm .5mm .1mm .05mm .01mm .005mm
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 6.000000
MAX_LINEAR_VELOCITY = 158.333333
MIN_LINEAR_VELOCITY = 0.500000
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
CYCLE_TIME = 100
[MDI_COMMAND_LIST]
MDI_COMMAND = G0 Z0;X0 Y0
MDI_COMMAND = G53 G0 Z0;G53 G0 X0 Y0
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
RS274NGC_STARTUP_CODE = G21 G40 G90 G94 G97 G64 P0.025
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
SERVO_PERIOD = 1000000
[HMOT]
CARD0=hm2_7c81.0
[HAL]
HALUI = halui
HALFILE = MuttCNC_No-Limits_RPi4.hal
HALFILE = custom.hal
POSTGUI_HALFILE = qtvcp_postgui.hal
POSTGUI_HALFILE = custom_postgui.hal
SHUTDOWN = shutdown.hal
[HALUI]
[KINS]
JOINTS = 3
KINEMATICS = trivkins coordinates=XYZ
[TRAJ]
COORDINATES = XYZ
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
DEFAULT_LINEAR_VELOCITY = 20.83
MAX_LINEAR_VELOCITY = 208.33
POSITION_FILE = position.txt
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
#******************************************
[AXIS_X]
MAX_VELOCITY = 208.33333333333334
MAX_ACCELERATION = 1150.0
MIN_LIMIT = -0.0
MAX_LIMIT = 785.0
[JOINT_0]
TYPE = LINEAR
HOME = 2.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 208.33333333333334
MAX_ACCELERATION = 1150.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 260.42
STEPGEN_MAXACCEL = 1437.5
P = 1000
I = 0
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 0
# these are in nanoseconds
DIRSETUP = 20000
DIRHOLD = 20000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 160.9
MIN_LIMIT = -0.0
MAX_LIMIT = 785.0
HOME_OFFSET = 2.0
HOME_SEQUENCE = 2
#******************************************
#******************************************
[AXIS_Y]
MAX_VELOCITY = 208.33333333333334
MAX_ACCELERATION = 1150.0
MIN_LIMIT = -0.0
MAX_LIMIT = 283.0
[JOINT_1]
TYPE = LINEAR
HOME = 2.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 208.33333333333334
MAX_ACCELERATION = 1150.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 260.42
STEPGEN_MAXACCEL = 1437.5
P = 1000
I = 0
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 159.1
MIN_LIMIT = -0.0
MAX_LIMIT = 283.0
HOME_OFFSET = 2.0
HOME_SEQUENCE = 3
#******************************************
#******************************************
[AXIS_Z]
MAX_VELOCITY = 46.666666666666664
MAX_ACCELERATION = 250.0
MIN_LIMIT = -150.0
MAX_LIMIT = 0.0
[JOINT_2]
TYPE = LINEAR
HOME = -2.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 46.666666666666664
MAX_ACCELERATION = 250.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 58.33
STEPGEN_MAXACCEL = 312.5
P = 1000
I = 0
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 0
# these are in nanoseconds
DIRSETUP = 20000
DIRHOLD = 20000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = -804.2
MIN_LIMIT = -150.0
MAX_LIMIT = 0.0
HOME_OFFSET = -2.0
HOME_SEQUENCE = 1
#******************************************
[SPINDLE_0]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 25000.0
ENCODER_SCALE = 1
OUTPUT_SCALE = 50000
OUTPUT_MIN_LIMIT = 0
OUTPUT_MAX_LIMIT = 25000.0
======================================================================
======================================================================
# Generated by PNCconf at Sat Apr 13 10:38:01 2024
# Using LinuxCNC version: Master (2.9)
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_rpspi config="firmware=hm2/7c81/MX3660X2.BIT num_encoders=2 num_pwmgens=2 num_stepgens=8 sserial_port_0=00xxxxxx"
setp [HMOT](CARD0).pwmgen.pwm_frequency 50
setp [HMOT](CARD0).pwmgen.pdm_frequency 6000000
setp [HMOT](CARD0).watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
loadrt scale names=scale.gear
loadrt near
loadrt mux16 names=ratio_select
addf [HMOT](CARD0).read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf ratio_select servo-thread
addf scale.gear servo-thread
addf near.0 servo-thread
addf [HMOT](CARD0).write servo-thread
setp [HMOT](CARD0).dpll.01.timer-us -50
setp [HMOT](CARD0).stepgen.timer-number 1
# external output signals
# --- MACHINE-IS-ENABLED ---
setp [HMOT](CARD0).gpio.000.is_output true
net machine-is-enabled => [HMOT](CARD0).gpio.000.out
setp [HMOT](CARD0).gpio.000.invert_output true
# --- MACHINE-IS-ENABLED ---
setp [HMOT](CARD0).gpio.019.is_output true
net machine-is-enabled => [HMOT](CARD0).gpio.019.out
setp [HMOT](CARD0).gpio.019.invert_output true
# --- COOLANT-FLOOD ---
setp [HMOT](CARD0).gpio.039.is_output true
net coolant-flood => [HMOT](CARD0).gpio.039.out
# --- COOLANT-MIST ---
setp [HMOT](CARD0).gpio.043.is_output true
net coolant-mist => [HMOT](CARD0).gpio.043.out
# --- SPINDLE-ENABLE ---
setp [HMOT](CARD0).gpio.045.is_output true
net spindle-enable => [HMOT](CARD0).gpio.045.out
setp [HMOT](CARD0).gpio.045.invert_output true
# external input signals
# --- ESTOP-EXT ---
net estop-ext <= [HMOT](CARD0).gpio.003.in
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.x.maxerror 0.012700
net x-index-enable => pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Step Gen signals/setup
setp [HMOT](CARD0).stepgen.04.dirsetup [JOINT_0]DIRSETUP
setp [HMOT](CARD0).stepgen.04.dirhold [JOINT_0]DIRHOLD
setp [HMOT](CARD0).stepgen.04.steplen [JOINT_0]STEPLEN
setp [HMOT](CARD0).stepgen.04.stepspace [JOINT_0]STEPSPACE
setp [HMOT](CARD0).stepgen.04.position-scale [JOINT_0]STEP_SCALE
setp [HMOT](CARD0).stepgen.04.step_type 0
setp [HMOT](CARD0).stepgen.04.control-type 1
setp [HMOT](CARD0).stepgen.04.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp [HMOT](CARD0).stepgen.04.maxvel [JOINT_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output => [HMOT](CARD0).stepgen.04.velocity-cmd
net x-pos-fb <= [HMOT](CARD0).stepgen.04.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => [HMOT](CARD0).stepgen.04.enable
# ---setup home / limit switch signals---
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.y.maxerror 0.012700
net y-index-enable => pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# Step Gen signals/setup
setp [HMOT](CARD0).stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp [HMOT](CARD0).stepgen.01.dirhold [JOINT_1]DIRHOLD
setp [HMOT](CARD0).stepgen.01.steplen [JOINT_1]STEPLEN
setp [HMOT](CARD0).stepgen.01.stepspace [JOINT_1]STEPSPACE
setp [HMOT](CARD0).stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp [HMOT](CARD0).stepgen.01.step_type 0
setp [HMOT](CARD0).stepgen.01.control-type 1
setp [HMOT](CARD0).stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp [HMOT](CARD0).stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-output => [HMOT](CARD0).stepgen.01.velocity-cmd
net y-pos-fb <= [HMOT](CARD0).stepgen.01.position-fb
net y-pos-fb => joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
net y-enable => [HMOT](CARD0).stepgen.01.enable
# ---setup home / limit switch signals---
net y-home-sw => joint.1.home-sw-in
net y-neg-limit => joint.1.neg-lim-sw-in
net y-pos-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.z.maxerror 0.012700
net z-index-enable => pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp [HMOT](CARD0).stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp [HMOT](CARD0).stepgen.02.dirhold [JOINT_2]DIRHOLD
setp [HMOT](CARD0).stepgen.02.steplen [JOINT_2]STEPLEN
setp [HMOT](CARD0).stepgen.02.stepspace [JOINT_2]STEPSPACE
setp [HMOT](CARD0).stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp [HMOT](CARD0).stepgen.02.step_type 0
setp [HMOT](CARD0).stepgen.02.control-type 1
setp [HMOT](CARD0).stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp [HMOT](CARD0).stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-vel-cmd <= joint.2.vel-cmd
net z-output => [HMOT](CARD0).stepgen.02.velocity-cmd
net z-pos-fb <= [HMOT](CARD0).stepgen.02.position-fb
net z-pos-fb => joint.2.motor-pos-fb
net z-enable <= joint.2.amp-enable-out
net z-enable => [HMOT](CARD0).stepgen.02.enable
# ---setup home / limit switch signals---
net z-home-sw => joint.2.home-sw-in
net z-neg-limit => joint.2.neg-lim-sw-in
net z-pos-limit => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
net ratio_select.out pid.s.maxoutput
setp pid.s.error-previous-target true
net spindle-index-enable => pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm-abs => pid.s.command
net spindle-vel-fb-rpm-abs => pid.s.feedback
net spindle-pid-out pid.s.output => scale.gear.in
net gear-ratio ratio_select.out-f => scale.gear.gain
setp ratio_select.in00 0.000200
setp ratio_select.in01 0.000040
net gear-select-a => ratio_select.sel0
net spindle-output <= scale.gear.out
# ---PWM Generator signals/setup---
setp [HMOT](CARD0).pwmgen.01.output-type 1
setp [HMOT](CARD0).pwmgen.01.scale [SPINDLE_0]OUTPUT_SCALE
setp hm2_7c81.0.gpio.020.invert_output true
net spindle-output => [HMOT](CARD0).pwmgen.01.value
net spindle-enable => [HMOT](CARD0).pwmgen.01.enable
# ---Encoder feedback signals/setup---
setp [HMOT](CARD0).encoder.01.counter-mode 1
setp [HMOT](CARD0).encoder.01.filter 1
setp [HMOT](CARD0).encoder.01.index-invert 0
setp [HMOT](CARD0).encoder.01.index-mask 0
setp [HMOT](CARD0).encoder.01.index-mask-invert 0
setp [HMOT](CARD0).encoder.01.scale [SPINDLE_0]ENCODER_SCALE
net spindle-revs <= [HMOT](CARD0).encoder.01.position
net spindle-vel-fb-rps <= [HMOT](CARD0).encoder.01.velocity
net spindle-vel-fb-rpm <= [HMOT](CARD0).encoder.01.velocity-rpm
net spindle-index-enable <=> [HMOT](CARD0).encoder.01.index-enable
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
net spindle-vel-cmd-rps => near.0.in1
net spindle-vel-fb-rps => near.0.in2
net spindle-at-speed <= near.0.out
setp near.0.scale 1.000000
setp near.0.difference 3.333333
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-ext => iocontrol.0.emc-enable-in
# ---manual tool change signals---
net tool-change-request <= iocontrol.0.tool-change
net tool-change-confirmed => iocontrol.0.tool-changed
net tool-number <= iocontrol.0.tool-prep-number
# ---ignore tool prepare requests---
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
======================================================================
Any change I made was through pncconf to keep me from making a change while screwing around that I would later forget about and be scratching my head if something was working...
Thanks.
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17917
- Thank you received: 5246
14 Apr 2024 18:13 #298243
by PCW
Replied by PCW on topic Spindle speed via SuperPID
OK that not the standard 5ABOB with the analog output
(I was assuming you were using the analog output)
If you set the spindle speed to 0, I would expect the PWM
pin to read very close to 0 V on a DVM.
Does the SuperPID provide duty cycle vs RPM information?
(I was assuming you were using the analog output)
If you set the spindle speed to 0, I would expect the PWM
pin to read very close to 0 V on a DVM.
Does the SuperPID provide duty cycle vs RPM information?
Please Log in or Create an account to join the conversation.
Time to create page: 0.275 seconds