7i77 TTL encoder
- abdulasis12
- Offline
- Premium Member
-

Less
More
- Posts: 133
- Thank you received: 8
09 Sep 2024 12:14 #309738
by abdulasis12
Replied by abdulasis12 on topic 7i77 TTL encoder
Thank you for reply MR.Tommy , MR.PCW
Now Encoder done .
I use solution slow JOG and check real moving distance and compare encoder now done.
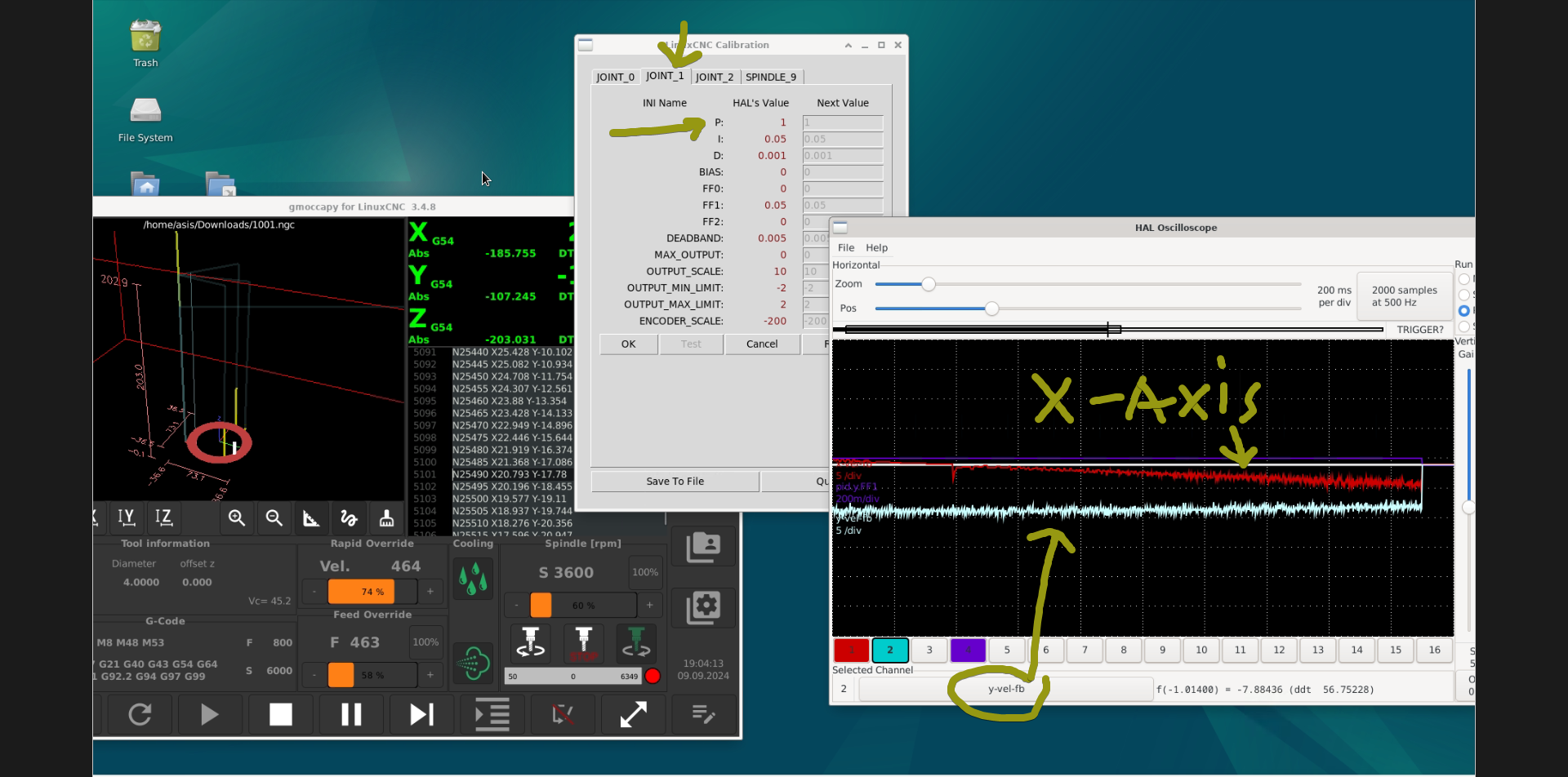
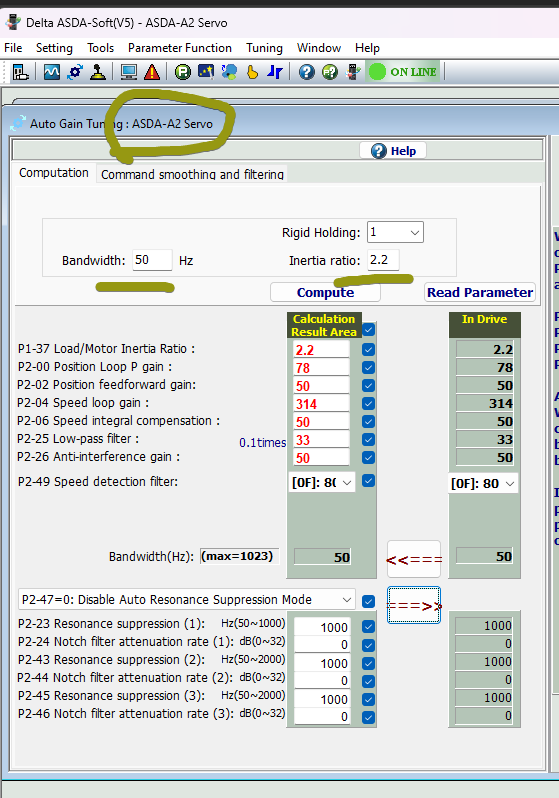
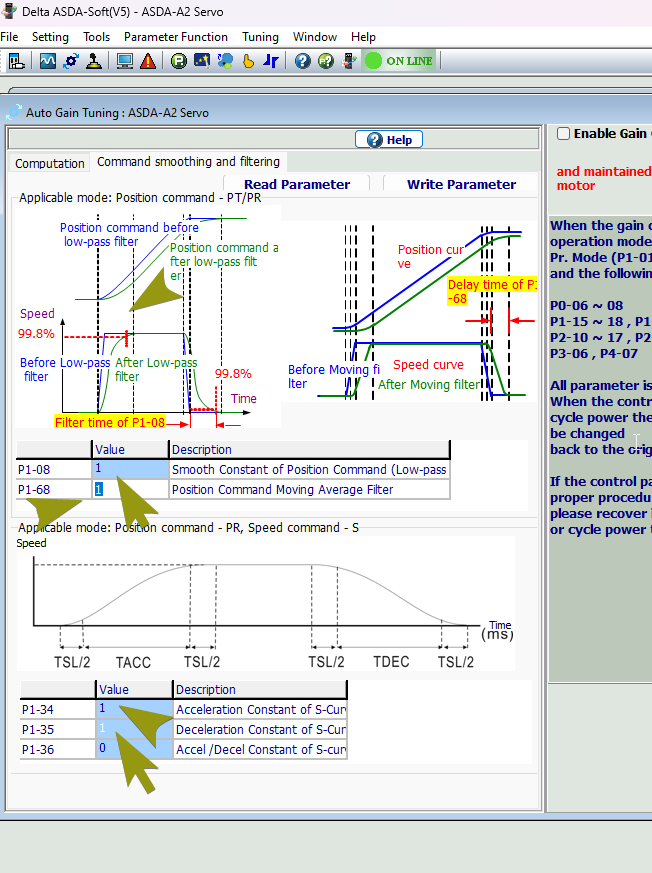
I config , setup , Tunning for Analog to Servo DELTA A2 (I use analog from 7i77) 2days I can't smooth tunning Servo motor (I check with Hall scope with signal x-vel fb , y-vel fb)
I read tunning from MR.Tommy
forum.linuxcnc.org/10-advanced-configura...mple-mesa-7i77#88210
and see picture ,He can P = 20 but me 1 - 1.5 only .
when P = 2 my servo super vibration and cut .
Servo DELTA A2 other config or setup ? can advice me ?
FYI:
- Sorry this is new topic but I don't know must open new post or inside this post better.
- X axis DELTA B2
-Y axis DELTA A2
- attach picture is DELTA A2 only
Thank you ,
Asis
Now Encoder done .
I use solution slow JOG and check real moving distance and compare encoder now done.
I config , setup , Tunning for Analog to Servo DELTA A2 (I use analog from 7i77) 2days I can't smooth tunning Servo motor (I check with Hall scope with signal x-vel fb , y-vel fb)
I read tunning from MR.Tommy
forum.linuxcnc.org/10-advanced-configura...mple-mesa-7i77#88210
and see picture ,He can P = 20 but me 1 - 1.5 only .
when P = 2 my servo super vibration and cut .
Servo DELTA A2 other config or setup ? can advice me ?
FYI:
- Sorry this is new topic but I don't know must open new post or inside this post better.
- X axis DELTA B2
-Y axis DELTA A2
- attach picture is DELTA A2 only
Thank you ,
Asis
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21764
- Thank you received: 7438
09 Sep 2024 12:41 #309742
by tommylight
Replied by tommylight on topic 7i77 TTL encoder
If the drives are not tuned properly to the motors they are using, no ammount of tuning in LinuxCNC will help.
Normal procedure for tuning analog drives is to tune the torque mode first with motor not attached to machine, then do velocity loop tunning in drive, and if drives have position mode also tune this.
Only after tuning drives to motors you can procees to tune in LinuxCNC, just do not forget to set the drive in velocity mode after testing position mode, if any.
Normal procedure for tuning analog drives is to tune the torque mode first with motor not attached to machine, then do velocity loop tunning in drive, and if drives have position mode also tune this.
Only after tuning drives to motors you can procees to tune in LinuxCNC, just do not forget to set the drive in velocity mode after testing position mode, if any.
The following user(s) said Thank You: Masiwood123, abdulasis12
Please Log in or Create an account to join the conversation.
Time to create page: 0.122 seconds