SCARA Vismach - Gcode error "exceed C's positive limit"
- DPFlex
- Offline
- Junior Member
-

Less
More
- Posts: 28
- Thank you received: 1
18 Sep 2024 10:22 #310360
by DPFlex
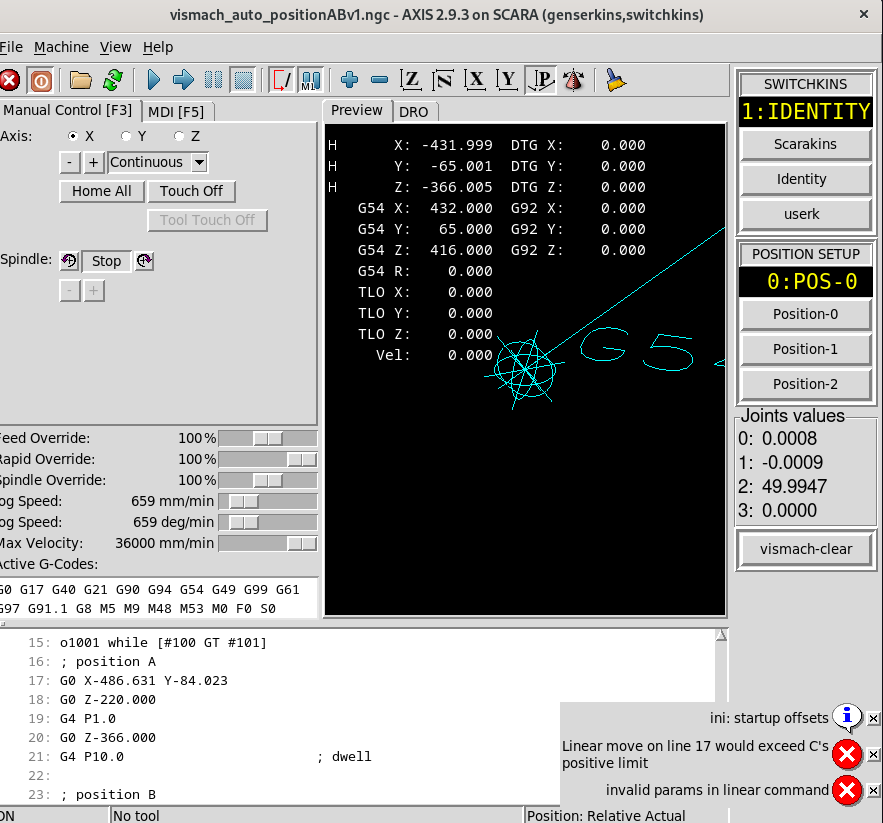
SCARA Vismach - Gcode error "exceed C's positive limit" was created by DPFlex
Hello,
My system is:
- LCNC 2.9.3, Debian 6.1.0-22-rt-amd64
- EtherCAT AC servo
- Everything is ok: homing, moving each axis separately, ...
When I run G-code, I have strange error: "Linear move on line xxx would exceed C's positive/negative limit".
I remember that it was ok with LCNC 2.9.2, but I have trouble with LCNC 2.9.3
I did big number of MIN & MAX Limit, but could not run G-Code.
Any advise ?. Thank you.

My system is:
- LCNC 2.9.3, Debian 6.1.0-22-rt-amd64
- EtherCAT AC servo
- Everything is ok: homing, moving each axis separately, ...
When I run G-code, I have strange error: "Linear move on line xxx would exceed C's positive/negative limit".
I remember that it was ok with LCNC 2.9.2, but I have trouble with LCNC 2.9.3
I did big number of MIN & MAX Limit, but could not run G-Code.
Any advise ?. Thank you.
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4709
- Thank you received: 2106
18 Sep 2024 11:55 #310365
by Aciera
Replied by Aciera on topic SCARA Vismach - Gcode error "exceed C's positive limit"
I'm not familiar with 'scarakins' but looking at 'configs/sim/axis/vismach/scara/scara.ini' and comparing that with your 'tsino_scara_3ax.ini' it seems to me that you have not configured enough joints:
[EMC]
VERSION = 1.1
MACHINE = SCARA (genserkins,switchkins)
#+ Debug level, 0 means no messages. See src/emc/nml_int/emcglb.h for others
#DEBUG = 0
[DISPLAY]
DISPLAY = axis
CYCLE_TIME = 0.200
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.0
PROGRAM_PREFIX = ../../nc_files/
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PYVCP = scara.xml
#EDITOR = geany
[RS274NGC]
SUBROUTINE_PATH = ./remap_subs
HAL_PIN_VARS = 1
HAL_PIN_VARS = 1
REMAP = M428 modalgroup=10 ngc=428remap
REMAP = M429 modalgroup=10 ngc=429remap
REMAP = M430 modalgroup=10 ngc=430remap
PARAMETER_FILE = scara.var
# startup mm and offsets for axis.ngc demo file:
RS274NGC_STARTUP_CODE = G21 G10L2P0 x432 y65 z416 (debug, ini: startup offsets)
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
SERVO_PERIOD = 1000000
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[KINS]
JOINTS = 6
# switchkins:
# kinstype==0 (default scarakins)
# j0,j1,j2,j3 -- implement scarakins for xyzc
# j4 == world->a (scaragui j4 is table tilt (y))
# j5 == world->b (scaragui j5 is table tilt (x))
# kinstype==1 (identity, assign per coordinates=xyzcab)
# letter x -- assigned to j0
# letter y -- assigned to j1
# letter z -- assigned to j2
# letter c -- assigned to j3
# letter a -- assigned to j4 (same as scarakins)
# letter b -- assigned to j5 (same as scarakins)
# kinstype==2 (userk, template is identity, user may specify)
#
# Note: coordinate= ordering for identity kins preserves ab relationships
KINEMATICS = scarakins coordinates=xyzcab
[HAL]
HALUI = halui
HALFILE = LIB:basic_sim.tcl
HALCMD = loadusr -W scaragui
HALCMD = net :kinstype-select <= motion.analog-out-03 => motion.switchkins-type
POSTGUI_HALFILE = scara_postgui.hal
[HALUI]
# M428:scara kins (kinstype==0 startupDEFAULT)
# M429:identity kins (kinstype==1)
# M430:userk kins (kinstype==2)
MDI_COMMAND = M428
MDI_COMMAND = M429
MDI_COMMAND = M430
[TRAJ]
COORDINATES = XYZABC
LINEAR_UNITS = mm
DEFAULT_LINEAR_VELOCITY = 10.0
MAX_LINEAR_VELOCITY = 600.0
DEFAULT_LINEAR_ACCELERATION = 100.0
MAX_LINEAR_ACCELERATION = 200.0
ANGULAR_UNITS = degree
DEFAULT_ANGULAR_VELOCITY = 10.0
MAX_ANGULAR_VELOCITY = 600.0
DEFAULT_ANGULAR_ACCELERATION = 100.0
MAX_ANGULAR_ACCELERATION = 200.0
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = scara.tbl
[AXIS_X]
MAX_VELOCITY = 30.0
MAX_ACCELERATION = 200.0
[AXIS_Y]
MAX_VELOCITY = 30.0
MAX_ACCELERATION = 200.0
[AXIS_Z]
MAX_VELOCITY = 30.0
MAX_ACCELERATION = 200.0
[AXIS_C]
MAX_VELOCITY = 60.0
MAX_ACCELERATION = 400.0
[JOINT_0]
NAME = shoulder
TYPE = ANGULAR
MAX_VELOCITY = 30.0
MAX_ACCELERATION = 200.0
MIN_LIMIT = -360.0
MAX_LIMIT = 360.0
HOME_OFFSET = 0.0
HOME = 0.000
HOME_SEQUENCE = 0
[JOINT_1]
NAME = elbow
TYPE = ANGULAR
MAX_VELOCITY = 30.0
MAX_ACCELERATION = 200.0
MIN_LIMIT = -360.0
MAX_LIMIT = 360.0
HOME_OFFSET = 0.0
HOME = 0.000
HOME_SEQUENCE = 0
[JOINT_2]
NAME = z-slide
TYPE = LINEAR
MAX_VELOCITY = 30.0
MAX_ACCELERATION = 200.0
MIN_LIMIT = 25.0
MAX_LIMIT = 300.0
HOME_OFFSET = 25.0
HOME = 25.000
HOME_SEQUENCE = 0
[JOINT_3]
NAME = wrist
TYPE = ANGULAR
MAX_VELOCITY = 60.0
MAX_ACCELERATION = 400.0
MIN_LIMIT = -180.0
MAX_LIMIT = 180.0
HOME_OFFSET = 0.0
HOME = 0.000
HOME_SEQUENCE = 0
[JOINT_4]
NAME = table_rotate
TYPE = ANGULAR
MAX_VELOCITY = 60.0
MAX_ACCELERATION = 400.0
MIN_LIMIT = -180.0
MAX_LIMIT = 180.0
HOME_OFFSET = 0.0
HOME = 0.000
HOME_SEQUENCE = 0
[JOINT_5]
NAME = table_rotate
TYPE = ANGULAR
MAX_VELOCITY = 60.0
MAX_ACCELERATION = 400.0
MIN_LIMIT = -180.0
MAX_LIMIT = 180.0
HOME_OFFSET = 0.0
HOME = 0.000
HOME_SEQUENCE = 0Please Log in or Create an account to join the conversation.
- DPFlex
- Offline
- Junior Member
-
Less
More
- Posts: 28
- Thank you received: 1
18 Sep 2024 13:52 #310367
by DPFlex
Replied by DPFlex on topic SCARA Vismach - Gcode error "exceed C's positive limit"
Hi Aciera,
Yes, correct, I copied scara.ini from vismach demo and revised it.
Actually there are 3 joints (J0, J1, J2) which are most useful in SCARA application. That's why I only test with 3 joints and removed 3 joints (J3,J4,J5)")
Is it root cause to have this error ?. should it be ?.
Thank you.
Yes, correct, I copied scara.ini from vismach demo and revised it.
Actually there are 3 joints (J0, J1, J2) which are most useful in SCARA application. That's why I only test with 3 joints and removed 3 joints (J3,J4,J5)
Is it root cause to have this error ?. should it be ?.
Thank you.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4709
- Thank you received: 2106
18 Sep 2024 15:51 #310374
by Aciera
Replied by Aciera on topic SCARA Vismach - Gcode error "exceed C's positive limit"
Problem is that the kinematic model in scarakins.c is for a scara with 3 angular joints and a linear joint and also two angular joints that move the table. You could easily remove those last two (ie j4/a and j5/b) from the kinematic as they are just looped through. J3/c however is part of the calculation so to remove that you will need to have a closer look at the forward and inverse kinematic model.
/* joint[0], joint[1] and joint[3] are in degrees and joint[2] is in length units */
static
int scaraKinematicsForward(const double * joint,
EmcPose * world,
const KINEMATICS_FORWARD_FLAGS * fflags,
KINEMATICS_INVERSE_FLAGS * iflags)
{
double a0, a1, a3;
double x, y, z, c;
/* convert joint angles to radians for sin() and cos() */
a0 = joint[0] * ( PM_PI / 180 );
a1 = joint[1] * ( PM_PI / 180 );
a3 = joint[3] * ( PM_PI / 180 );
/* convert angles into world coords */
a1 = a1 + a0;
a3 = a3 + a1;
x = D2*cos(a0) + D4*cos(a1) + D6*cos(a3);
y = D2*sin(a0) + D4*sin(a1) + D6*sin(a3);
z = D1 + D3 - joint[2] - D5;
c = a3;
*iflags = 0;
if (joint[1] < 90)
*iflags = 1;
world->tran.x = x;
world->tran.y = y;
world->tran.z = z;
world->c = c * 180 / PM_PI;
world->a = joint[4];
world->b = joint[5];
return (0);
} //scaraKinematicsForward()
static int scaraKinematicsInverse(const EmcPose * world,
double * joint,
const KINEMATICS_INVERSE_FLAGS * iflags,
KINEMATICS_FORWARD_FLAGS * fflags)
{
double a3;
double q0, q1;
double xt, yt, rsq, cc;
double x, y, z, c;
x = world->tran.x;
y = world->tran.y;
z = world->tran.z;
c = world->c;
/* convert degrees to radians */
a3 = c * ( PM_PI / 180 );
/* center of end effector (correct for D6) */
xt = x - D6*cos(a3);
yt = y - D6*sin(a3);
/* horizontal distance (squared) from end effector centerline
to main column centerline */
rsq = xt*xt + yt*yt;
/* joint 1 angle needed to make arm length match sqrt(rsq) */
cc = (rsq - D2*D2 - D4*D4) / (2*D2*D4);
if(cc < -1) cc = -1;
if(cc > 1) cc = 1;
q1 = acos(cc);
if (*iflags)
q1 = -q1;
/* angle to end effector */
q0 = atan2(yt, xt);
/* end effector coords in inner arm coord system */
xt = D2 + D4*cos(q1);
yt = D4*sin(q1);
/* inner arm angle */
q0 = q0 - atan2(yt, xt);
/* q0 and q1 are still in radians. convert them to degrees */
q0 = q0 * (180 / PM_PI);
q1 = q1 * (180 / PM_PI);
joint[0] = q0;
joint[1] = q1;
joint[2] = D1 + D3 - D5 - z;
joint[3] = c - ( q0 + q1);
joint[4] = world->a;
joint[5] = world->b;
*fflags = 0;
return (0);
} // scaraKinematicsInverse()
The following user(s) said Thank You: DPFlex
Please Log in or Create an account to join the conversation.
- DPFlex
- Offline
- Junior Member
-
Less
More
- Posts: 28
- Thank you received: 1
19 Sep 2024 12:46 #310449
by DPFlex
Replied by DPFlex on topic SCARA Vismach - Gcode error "exceed C's positive limit"
Hi Aciera,
You are correct. I added joint-3 and it worked
I see another issue of "tk window".
As my testing, I test moving from position-A to position-B in 200 times.
Normally after 50th time, the "tk window" is freezing, although G-code and real motors are still running.
Have you faced this issue ?.
Thank you.
You are correct. I added joint-3 and it worked
I see another issue of "tk window".
As my testing, I test moving from position-A to position-B in 200 times.
Normally after 50th time, the "tk window" is freezing, although G-code and real motors are still running.
Have you faced this issue ?.
Thank you.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4709
- Thank you received: 2106
19 Sep 2024 13:26 #310453
by Aciera
Replied by Aciera on topic SCARA Vismach - Gcode error "exceed C's positive limit"
Try starting your config through a terminal
and see if you get any errors in the terminal output when the tk window freezes.
$ linuxcncand see if you get any errors in the terminal output when the tk window freezes.
Please Log in or Create an account to join the conversation.
- raf1110
-
- Offline
- Senior Member
-

Less
More
- Posts: 46
- Thank you received: 5
19 Sep 2024 21:48 #310481
by raf1110
Replied by raf1110 on topic SCARA Vismach - Gcode error "exceed C's positive limit"
You can change debug level to 5 i think it will give more details if you run from terminal. ")
Please Log in or Create an account to join the conversation.
Time to create page: 0.138 seconds