Weird artifact while decelerating high speed robot arm
- hellvetica
- Offline
- Junior Member
-

Less
More
- Posts: 29
- Thank you received: 1
17 Jan 2025 08:54 #319165
by hellvetica
Weird artifact while decelerating high speed robot arm was created by hellvetica
Hi, I'm building a high speed rDelta robot arm.
I have a test program that just repeats a circle move twice at nearly 2m/s.
This works great except i noticed a weird deceleration artifact. It stops slowing down for a moment, speeds up and then decelerates into its last point.
This is also visible on the robot itself.
The blue line in the plot I attached is velocity from the hal pin motion.current-vel.
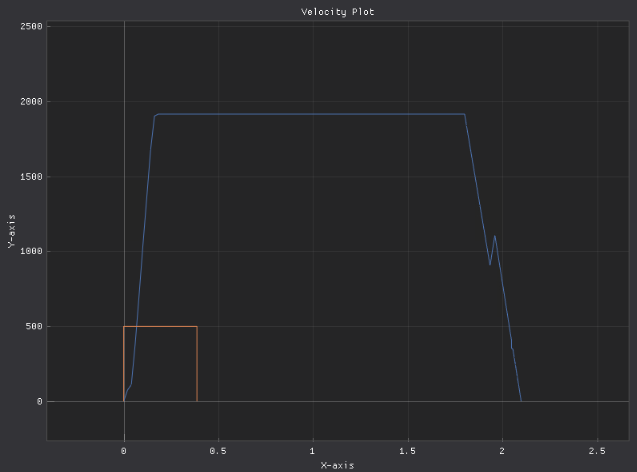
As I've been playing with accelerations and velocities in the .ini file I suspect something in there might be the cause. Any ideas?
I also attached my .ini file
ps I'm building some custom plotting software but the same thing is visible in hal-scope
I have a test program that just repeats a circle move twice at nearly 2m/s.
This works great except i noticed a weird deceleration artifact. It stops slowing down for a moment, speeds up and then decelerates into its last point.
This is also visible on the robot itself.
The blue line in the plot I attached is velocity from the hal pin motion.current-vel.
As I've been playing with accelerations and velocities in the .ini file I suspect something in there might be the cause. Any ideas?
I also attached my .ini file
ps I'm building some custom plotting software but the same thing is visible in hal-scope
Attachments:
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
17 Jan 2025 18:53 #319206
by andypugh
Replied by andypugh on topic Weird artifact while decelerating high speed robot arm
Is there any chance that this corresponds to something in the kinematics? Maybe an inflection point in one of the joints?
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 12013
- Thank you received: 4096
18 Jan 2025 03:27 #319245
by rodw
Think of 2D motion on X & Y at 45 deg at max velocity. Both axes will be moving at their max, but the total combined axis velocity will be about 40% higher.
Replied by rodw on topic Weird artifact while decelerating high speed robot arm
Its possible that at that point another joint starts contributing to the motion.Is there any chance that this corresponds to something in the kinematics? Maybe an inflection point in one of the joints?
Think of 2D motion on X & Y at 45 deg at max velocity. Both axes will be moving at their max, but the total combined axis velocity will be about 40% higher.
Please Log in or Create an account to join the conversation.
- hellvetica
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 1
20 Jan 2025 15:12 #319466
by hellvetica
Replied by hellvetica on topic Weird artifact while decelerating high speed robot arm
I don't think so. The same point is being passed through twice in this graph. If it was an inflection point there would be multiple artifacts, right?
Please Log in or Create an account to join the conversation.
Time to create page: 0.100 seconds