Custom scara kinematic.
- Stanislavz
- Offline
- Senior Member
-

Less
More
- Posts: 66
- Thank you received: 18
19 Jan 2025 18:06 - 19 Jan 2025 18:08 #319390
by Stanislavz
Custom scara kinematic. was created by Stanislavz
Hello. Could some-one point me how to implent non-standart kinematic for robots ?
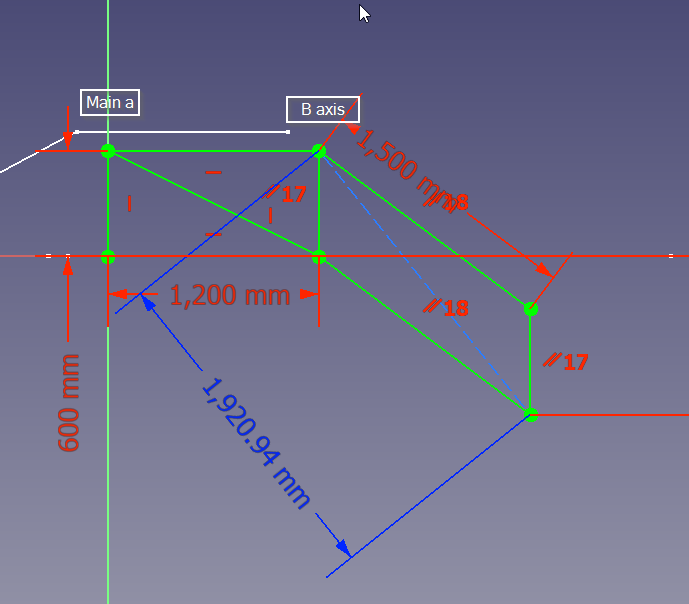
As in photo below - scara with one arma at 1200 length and other with 1500, but able to swing up and down for some z movement ?
And yes - due to z movement of outer arm, project length is chaniged and needs to be recalculated for each z position. I did all math side for both forward and inverse kinematics.
[/code]
As in photo below - scara with one arma at 1200 length and other with 1500, but able to swing up and down for some z movement ?
And yes - due to z movement of outer arm, project length is chaniged and needs to be recalculated for each z position. I did all math side for both forward and inverse kinematics.
[attachment=67048]2025-01-1918_53_54-_scara-FreeCAD1.0.0.png[/attachment]
[code]import math
import linuxcnc
def forward_kinematics(joint):
"""
Forward kinematics for SCARA with parallelogram mechanism and tension-controlled Z movement.
joint[0] = Theta1 (Base rotation)
joint[1] = Theta2 (Second arm rotation)
joint[2] = Z movement via parallelogram
"""
L1 = 1.2 # First arm length (m)
L2 = 1.5 # Second arm length (m) to achieve 1.8m z reach
Z_parallelogram = 0.6 # Parallelogram tension control length (m)
Z_min, Z_max = -0.9, 0.9 # Define valid Z range
# Clamp Z within limits
z = max(Z_min, min(joint[2], Z_max))
# Compute effective second arm length with bidirectional movement
L2_projected = math.sqrt(L2**2 - z**2)
# Compute correct tension-controlled parallelogram movement
delta_z = math.sqrt((Z_parallelogram - z)**2 + L2_projected**2)
# Compute end-effector position
x = L1 * math.cos(joint[0]) + L2_projected * math.cos(joint[0] + joint[1])
y = L1 * math.sin(joint[0]) + L2_projected * math.sin(joint[0] + joint[1])
return (x, y, delta_z)
def inverse_kinematics(x, y, z):
"""
Inverse kinematics for SCARA with parallelogram mechanism and tension-controlled Z movement.
"""
L1 = 1.2 # First arm length (m)
L2 = 1.5 # Second arm length (m) for 1.8m reach
Z_parallelogram = 0.6 # Parallelogram tension control length (m)
Z_min, Z_max = -0.9, 0.9 # Define valid Z range
# Clamp Z within limits
z = max(Z_min, min(z, Z_max))
# Adjust for parallelogram tension effect using correct formula
L2_projected = math.sqrt(L2**2 - z**2)
adjusted_z = math.sqrt((Z_parallelogram - z)**2 + L2_projected**2)
# Compute effective second arm length with bidirectional movement
L2_eff = math.sqrt(L2**2 - adjusted_z**2)
# Compute inverse kinematics
D = (x**2 + y**2 - L1**2 - L2_eff**2) / (2 * L1 * L2_eff)
if abs(D) > 1:
raise ValueError("Position out of reach")
theta2 = math.acos(D)
theta1_1 = math.atan2(y, x) - math.atan2(L2_eff * math.sin(theta2), L1 + L2_eff * math.cos(theta2))
theta1_2 = math.atan2(y, x) - math.atan2(-L2_eff * math.sin(theta2), L1 + L2_eff * math.cos(theta2))
return [(theta1_1, theta2, adju [attachment=67048]2025-01-19 18_53_54-_ scara - FreeCAD 1.0.0.png[/attachment]sted_z), (theta1_2, theta2, adjusted_z)] # Two possible solutions
And Z axis should be controlled by some rope wire tensioning paralelogram part.
Attachments:
Last edit: 19 Jan 2025 18:08 by Stanislavz. Reason: image is not seen :(
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21758
- Thank you received: 7434
19 Jan 2025 18:11 - 19 Jan 2025 18:14 #319391
by tommylight
Replied by tommylight on topic Custom scara kinematic.
The attachment is inside the code section, hence it does not show.
Here is the image from the above post, just in case.
Here is the image from the above post, just in case.
Last edit: 19 Jan 2025 18:14 by tommylight.
The following user(s) said Thank You: Stanislavz
Please Log in or Create an account to join the conversation.
- Stanislavz
- Offline
- Senior Member
-
Less
More
- Posts: 66
- Thank you received: 18
19 Jan 2025 18:13 - 19 Jan 2025 18:38 #319392
by Stanislavz
Replied by Stanislavz on topic Custom scara kinematic.
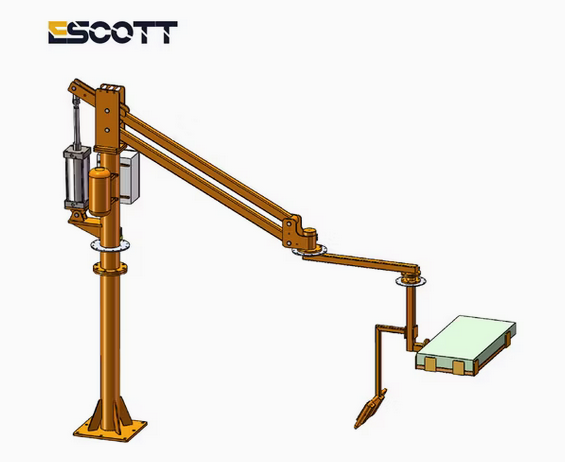
Like this one, but here it is mid arm with parallelogram. And i will need to modify this one code : github.com/LinuxCNC/linuxcnc/blob/master...nematics/scarakins.c
Attachments:
Last edit: 19 Jan 2025 18:38 by Stanislavz.
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4764
- Thank you received: 2135
19 Jan 2025 18:53 - 19 Jan 2025 18:57 #319397
by Aciera
Replied by Aciera on topic Custom scara kinematic.
For a simple example of a custom kinematic see
'configs/sim/axis/vismach/millturn'
The kinematic file used is this one:
github.com/LinuxCNC/linuxcnc/blob/master...onents/millturn.comp
These .comp files can be compiled and installed using the 'halcompile' tool.
[edit]
For a more complex example see:
github.com/LinuxCNC/linuxcnc/blob/master.../xyzab_tdr_kins.comp
'configs/sim/axis/vismach/millturn'
The kinematic file used is this one:
github.com/LinuxCNC/linuxcnc/blob/master...onents/millturn.comp
These .comp files can be compiled and installed using the 'halcompile' tool.
[edit]
For a more complex example see:
github.com/LinuxCNC/linuxcnc/blob/master.../xyzab_tdr_kins.comp
Last edit: 19 Jan 2025 18:57 by Aciera.
The following user(s) said Thank You: Stanislavz
Please Log in or Create an account to join the conversation.
- Stanislavz
- Offline
- Senior Member
-
Less
More
- Posts: 66
- Thank you received: 18
19 Jan 2025 19:26 #319399
by Stanislavz
Replied by Stanislavz on topic Custom scara kinematic.
Thank you. Did try to make some code, all loks trivial, except i do not undrestood how does we keep our z axis/ ensure 0 of z axis at the middle. ie - if in config i set up z as viable from 0 till 1800, then i could manipulate D1 (console height) and D5 (effector length) as in code below to compensate for this. but i to not see how it would work for different setups or and shell i do the same for forward kinematic. Or better skip both, and just setup machine for -900 till 900 z travel and play coordinate transfer ? this line : z_transformed = z - D1 + D5 ; // should return as at 0 level of arms for -900
#include "rtapi.h"
#include "rtapi_math.h"
#include "rtapi_string.h"
#include "posemath.h"
#include "hal.h"
#include "kinematics.h"
#include "switchkins.h"
struct scara_data {
hal_float_t *d1, *d2, *d3, *d4, *d5, *d6;
} *haldata = 0;
#define D1 (*(haldata->d1))
#define D2 (*(haldata->d2))
#define D3 (*(haldata->d3)) // Now used as Z_parallelogram height
#define D4 (*(haldata->d4)) // Keep as fixed second arm length
#define D5 (*(haldata->d5))
#define D6 (*(haldata->d6))
static
int scaraKinematicsForward(const double * joint,
EmcPose * world,
const KINEMATICS_FORWARD_FLAGS * fflags,
KINEMATICS_INVERSE_FLAGS * iflags)
{
double a0, a1, a3;
double x, y, z, c;
a0 = joint[0] * ( PM_PI / 180 );
a1 = joint[1] * ( PM_PI / 180 );
a3 = joint[3] * ( PM_PI / 180 );
a1 = a1 + a0;
a3 = a3 + a1;
// Compute projected second arm length dynamically
double D4_projected = sqrt(D4 * D4 - joint[2] * joint[2]);
x = D2*cos(a0) + D4_projected*cos(a1) + D6*cos(a3);
y = D2*sin(a0) + D4_projected*sin(a1) + D6*sin(a3);
// Compute parallelogram-based Z
z = sqrt((D3 - joint[2]) * (D3 - joint[2]) + D4_projected * D4_projected);
c = a3;
*iflags = 0;
if (joint[1] < 90)
*iflags = 1;
world->tran.x = x;
world->tran.y = y;
world->tran.z = z;
world->c = c * 180 / PM_PI;
world->a = joint[4];
world->b = joint[5];
return (0);
}
static int scaraKinematicsInverse(const EmcPose * world,
double * joint,
const KINEMATICS_INVERSE_FLAGS * iflags,
KINEMATICS_FORWARD_FLAGS * fflags)
{
double a3;
double q0, q1;
double xt, yt, rsq, cc;
double x, y, z, c;
double D4_projected, z_transformed;
x = world->tran.x;
y = world->tran.y;
z = world->tran.z;
c = world->c;
a3 = c * ( PM_PI / 180 );
xt = x - D6*cos(a3);
yt = y - D6*sin(a3);
z_transformed = z - D1 + D5 ; // should return as at 0 level of arms for -900
rsq = xt*xt + yt*yt;
D4_projected = sqrt(D4 * D4 - z_transformed * z_transformed);
cc = (rsq - D2 * D2 - D4_projected * D4_projected) / (2 * D2 * D4_projected);
if(cc < -1) cc = -1;
if(cc > 1) cc = 1;
q1 = acos(cc);
if (*iflags)
q1 = -q1;
q0 = atan2(yt, xt);
xt = D2 + D4_projected*cos(q1);
yt = D4_projected*sin(q1);
q0 = q0 - atan2(yt, xt);
q0 = q0 * (180 / PM_PI);
q1 = q1 * (180 / PM_PI);
joint[0] = q0;
joint[1] = q1;
// Compute inverse for parallelogram Z
joint[2] = sqrt(z_transformed * z_transformed - D4_projected * D4_projected);
joint[3] = c - ( q0 + q1);
joint[4] = world->a;
joint[5] = world->b;
*fflags = 0;
return (0);
} //scaraKinematicsInverse()
#define DEFAULT_D1 1200
#define DEFAULT_D2 1200
#define DEFAULT_D3 600
#define DEFAULT_D4 1500
#define DEFAULT_D5 300
#define DEFAULT_D6 0
static int scaraKinematicsSetup(const int comp_id,
const char* coordinates,
kparms* kp)
{
int res=0;
haldata = hal_malloc(sizeof(*haldata));
if (!haldata) goto error;
res += hal_pin_float_newf(HAL_IN, &(haldata->d1), comp_id,"%s.D1",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &(haldata->d2), comp_id,"%s.D2",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &(haldata->d3), comp_id,"%s.D3",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &(haldata->d4), comp_id,"%s.D4",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &(haldata->d5), comp_id,"%s.D5",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &(haldata->d6), comp_id,"%s.D6",kp->halprefix);
if (res) { goto error; }
D1 = DEFAULT_D1;
D2 = DEFAULT_D2;
D3 = DEFAULT_D3;
D4 = DEFAULT_D4;
D5 = DEFAULT_D5;
D6 = DEFAULT_D6;
return 0;
error:
return -1;
} // scaraKinematicsSetup()
int switchkinsSetup(kparms* kp,
KS* kset0, KS* kset1, KS* kset2,
KF* kfwd0, KF* kfwd1, KF* kfwd2,
KI* kinv0, KI* kinv1, KI* kinv2
)
{
kp->kinsname = "scarakins"; // !!! must agree with filename
kp->halprefix = "scarakins"; // hal pin names
kp->required_coordinates = "xyzabc"; // ab are scaragui table tilts
kp->allow_duplicates = 0;
kp->max_joints = strlen(kp->required_coordinates);
rtapi_print("\n!!! switchkins-type 0 is %s\n",kp->kinsname);
*kset0 = scaraKinematicsSetup;
*kfwd0 = scaraKinematicsForward;
*kinv0 = scaraKinematicsInverse;
*kset1 = identityKinematicsSetup;
*kfwd1 = identityKinematicsForward;
*kinv1 = identityKinematicsInverse;
*kset2 = userkKinematicsSetup;
*kfwd2 = userkKinematicsForward;
*kinv2 = userkKinematicsInverse;
return 0;
} // switchkinsSetup()Please Log in or Create an account to join the conversation.
Time to create page: 0.178 seconds