STEPLEN STEPSPACE time for Bergerda AC servo driver
- tommy
- Offline
- Premium Member
-

Less
More
- Posts: 106
- Thank you received: 3
15 Mar 2025 17:32 #324009
by tommy
STEPLEN STEPSPACE time for Bergerda AC servo driver was created by tommy
I'm trying to reach 10000mm/min max velocity on three axis, but lowering STEPLEN and STEPSAPECE below 1000 nanoseconds, following error shows up immediately.
Based on driver specs Maximum frequency of input is 1MHZ (Differential motion).
I believe mesa 7i95T isn't limiting factor here!?
My current values:
DIRSETUP = 200
DIRHOLD = 200
STEPLEN = 1000
STEPSPACE = 1000
SCALE = 2000
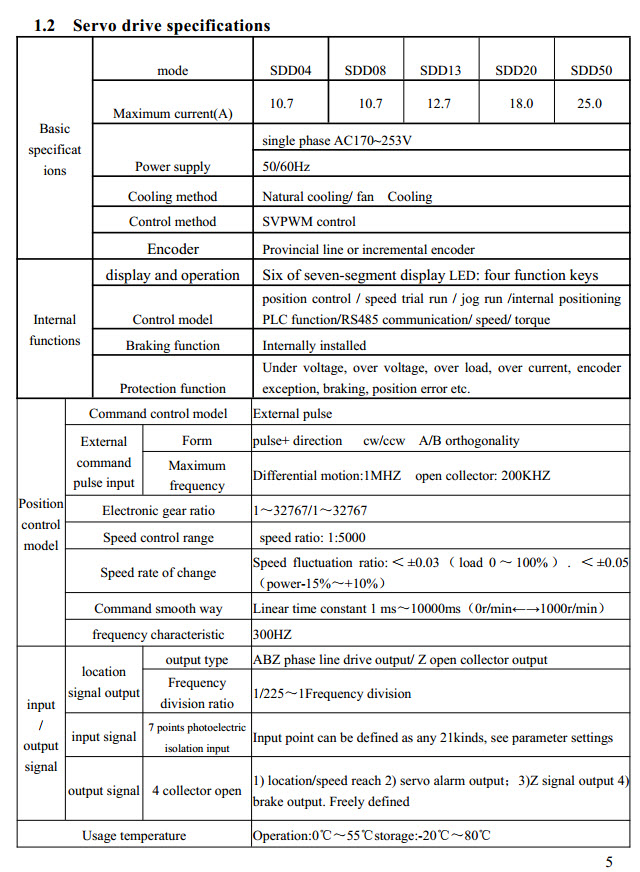
Based on driver specs Maximum frequency of input is 1MHZ (Differential motion).
I believe mesa 7i95T isn't limiting factor here!?
My current values:
DIRSETUP = 200
DIRHOLD = 200
STEPLEN = 1000
STEPSPACE = 1000
SCALE = 2000
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17977
- Thank you received: 5275
15 Mar 2025 17:48 - 15 Mar 2025 17:57 #324012
by PCW
Replied by PCW on topic STEPLEN STEPSPACE time for Bergerda AC servo driver
Are you using 7I95T encoder feedback?
Can you post your hal/ini files?
Reducing the steplength and stepspace parameters
will not directly cause a following error, though reducing them
will allow higher speeds that may expose other limits.
The 7I95T is capable of generating up to 10 MHz step rates
Can you post your hal/ini files?
Reducing the steplength and stepspace parameters
will not directly cause a following error, though reducing them
will allow higher speeds that may expose other limits.
The 7I95T is capable of generating up to 10 MHz step rates
Last edit: 15 Mar 2025 17:57 by PCW.
Please Log in or Create an account to join the conversation.
- tommy
- Offline
- Premium Member
-
Less
More
- Posts: 106
- Thank you received: 3
15 Mar 2025 18:29 #324014
by tommy
Replied by tommy on topic STEPLEN STEPSPACE time for Bergerda AC servo driver
Yes I'm using encoder feedback for all axis.
ini & hal files attached
If you will check files, there are JOINT 0,1 and 6 on which I would like to increase velocity.
ini & hal files attached
If you will check files, there are JOINT 0,1 and 6 on which I would like to increase velocity.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17977
- Thank you received: 5275
15 Mar 2025 18:48 - 15 Mar 2025 19:08 #324016
by PCW
Replied by PCW on topic STEPLEN STEPSPACE time for Bergerda AC servo driver
I would make these changes in the hal file and try again:
Comment out all these (XYZ etc) lines.
That is, change this:
net x-vel-fb hm2_[MESA](BOARD).0.encoder.00.velocity => pid.x.feedback-deriv
to this:
#net x-vel-fb hm2_[MESA](BOARD).0.encoder.00.velocity => pid.x.feedback-deriv
(and so on for y,z etc)
Then add these lines:
setp hm2_[MESA](BOARD).0.dpll.01.timer-us -200
setp hm2_[MESA](BOARD).0.encoder.timer-number 1
setp hm2_[MESA](BOARD).0.stepgen.timer-number 1
setp hm2_[MESA](BOARD).0.encoder.sample-frequency 20000000
Comment out all these (XYZ etc) lines.
That is, change this:
net x-vel-fb hm2_[MESA](BOARD).0.encoder.00.velocity => pid.x.feedback-deriv
to this:
#net x-vel-fb hm2_[MESA](BOARD).0.encoder.00.velocity => pid.x.feedback-deriv
(and so on for y,z etc)
Then add these lines:
setp hm2_[MESA](BOARD).0.dpll.01.timer-us -200
setp hm2_[MESA](BOARD).0.encoder.timer-number 1
setp hm2_[MESA](BOARD).0.stepgen.timer-number 1
setp hm2_[MESA](BOARD).0.encoder.sample-frequency 20000000
Last edit: 15 Mar 2025 19:08 by PCW.
Please Log in or Create an account to join the conversation.
- tommy
- Offline
- Premium Member
-
Less
More
- Posts: 106
- Thank you received: 3
16 Mar 2025 13:02 - 16 Mar 2025 14:10 #324047
by tommy
Replied by tommy on topic STEPLEN STEPSPACE time for Bergerda AC servo driver
setp hm2_[MESA](BOARD).0.encoder.sample-frequency 20000000 gives me error on startup (pin not exist).
So I tried with:
setp hm2_[MESA](BOARD).0.encoder.muxed-sample-frequency 20000000
but result is same, when lowering STEPLEN and STEPSPACE from 1000 to 800, immediate following error.
A have also attached my hal_load file to check
So I tried with:
setp hm2_[MESA](BOARD).0.encoder.muxed-sample-frequency 20000000
but result is same, when lowering STEPLEN and STEPSPACE from 1000 to 800, immediate following error.
A have also attached my hal_load file to check
Last edit: 16 Mar 2025 14:10 by tommy.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17977
- Thank you received: 5275
16 Mar 2025 14:34 #324054
by PCW
Replied by PCW on topic STEPLEN STEPSPACE time for Bergerda AC servo driver
You may have to increase the following error limits a bit and plot the
commanded and feedback positions and joint following error with halscope
to determine why you are getting a following error:
Possibilities:
Drive does not work with shorter step signals
Encoder feedback does not work at higher speeds
Instability/tuning issues
commanded and feedback positions and joint following error with halscope
to determine why you are getting a following error:
Possibilities:
Drive does not work with shorter step signals
Encoder feedback does not work at higher speeds
Instability/tuning issues
Please Log in or Create an account to join the conversation.
- tommy
- Offline
- Premium Member
-
Less
More
- Posts: 106
- Thank you received: 3
16 Mar 2025 16:03 #324060
by tommy
Replied by tommy on topic STEPLEN STEPSPACE time for Bergerda AC servo driver
Scope reading with 1000 nanoseconds:
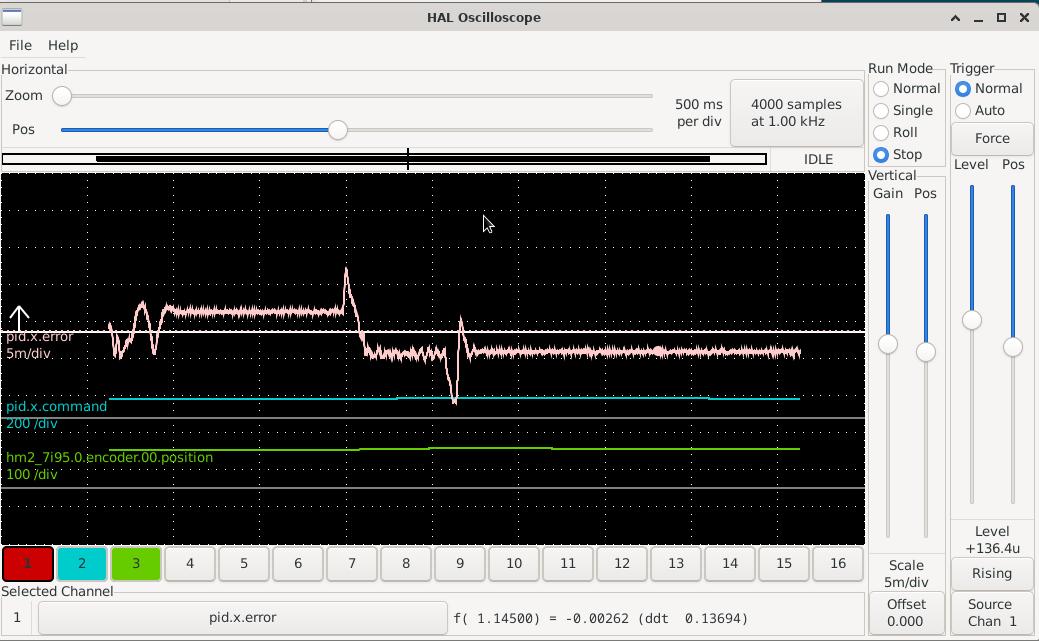
And with 900 nanoseconds and increased following error:
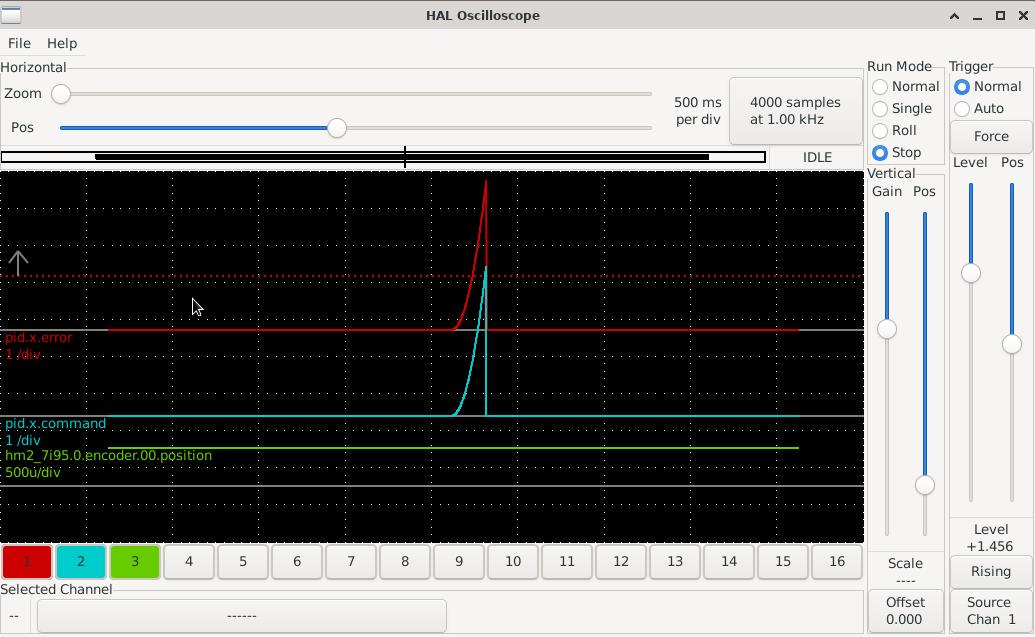
And with 900 nanoseconds and increased following error:
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17977
- Thank you received: 5275
16 Mar 2025 18:16 #324065
by PCW
Replied by PCW on topic STEPLEN STEPSPACE time for Bergerda AC servo driver
Looks like the drive is not responding to shorter step pulses (no motion at all)
Is is possible there is a digital filter in the drive so it rejects shorter than 1000 ns step pulses?
Is is possible there is a digital filter in the drive so it rejects shorter than 1000 ns step pulses?
Please Log in or Create an account to join the conversation.
- tommy
- Offline
- Premium Member
-
Less
More
- Posts: 106
- Thank you received: 3
16 Mar 2025 21:28 - 16 Mar 2025 21:29 #324071
by tommy
Replied by tommy on topic STEPLEN STEPSPACE time for Bergerda AC servo driver
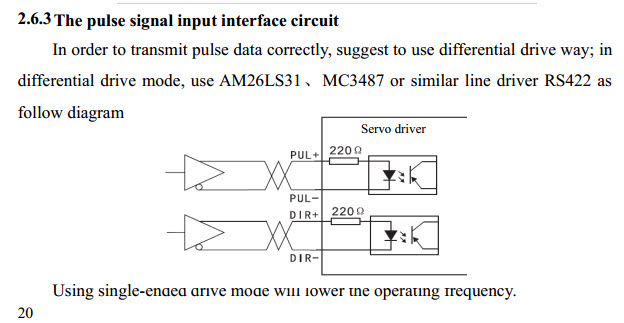
Driver manual can be downloaded here: en.bergerda.com/download/31.html
I checked, there is parameter P82 - Input pulse filter frequency, which default value by manual is 800, but need to check tomorrow what number is actually set!

I checked, there is parameter P82 - Input pulse filter frequency, which default value by manual is 800, but need to check tomorrow what number is actually set!
Attachments:
Last edit: 16 Mar 2025 21:29 by tommy.
Please Log in or Create an account to join the conversation.
- tommy
- Offline
- Premium Member
-
Less
More
- Posts: 106
- Thank you received: 3
17 Mar 2025 16:20 #324125
by tommy
Replied by tommy on topic STEPLEN STEPSPACE time for Bergerda AC servo driver
Parameter 82 did the trick! It was set to 600 by default, now I set it to 1000, and works perfectly up to 170mm/s velocity.
Please Log in or Create an account to join the conversation.
Time to create page: 0.227 seconds