- Configuring LinuxCNC
- Configuration Tools
- PnCConf Wizard
- Mesa 5i25/7i76 + driver leadshine DM2282 digital
Mesa 5i25/7i76 + driver leadshine DM2282 digital
- Todd Zuercher
-

- Offline
- Platinum Member
-

Less
More
- Posts: 4757
- Thank you received: 1459
25 Jul 2016 12:31 #77974
by Todd Zuercher
Replied by Todd Zuercher on topic Mesa 5i25/7i76 + driver leadshine DM2282 digital
The hardware stepgens, are controlled a like a servo. Linuxcnc sends a velocity command to the stepgen, and the hardware step generator sends a position feed back to Linuxcnc, these are plugged into the PID loop. This works better than just sending the postion commands to the step generator, and helps smooth out problems introduced by jitter in the control PC's real-time system.
P is the P term in the PID loop. P is for proportional. (google PID loop for more detailed info)
P is the P term in the PID loop. P is for proportional. (google PID loop for more detailed info)
Please Log in or Create an account to join the conversation.
- echesortux
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

Less
More
- Posts: 46
- Thank you received: 1
25 Jul 2016 14:49 #77988
by echesortux
Replied by echesortux on topic Mesa 5i25/7i76 + driver leadshine DM2282 digital
Thanks to all, today we will test it and them we comment the news.
Thanks.
Thanks.
Please Log in or Create an account to join the conversation.
- echesortux
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 46
- Thank you received: 1
26 Jul 2016 19:39 #78052
by echesortux
Replied by echesortux on topic Mesa 5i25/7i76 + driver leadshine DM2282 digital
Hello Folks, that is what we have made:
changed P parameter to 1000 (nothing happened )
)
changed setp pid.N.maxerror .0005 to 0 (Nothing happened )
after doing some change we edited the scale parameter in the INI and it starts to work correctly.
Next weekend we are going to make more deep testing and then I will tell you how it went.
Thanks
changed P parameter to 1000 (nothing happened
)changed setp pid.N.maxerror .0005 to 0 (Nothing happened
)after doing some change we edited the scale parameter in the INI and it starts to work correctly.
Next weekend we are going to make more deep testing and then I will tell you how it went.
Thanks
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17977
- Thank you received: 5275
26 Jul 2016 19:50 #78053
by PCW
You may not have noticed the change in behaviour
but these parameter changes are required
Replied by PCW on topic Mesa 5i25/7i76 + driver leadshine DM2282 digital
changed P parameter to 1000 (nothing happened
changed setp pid.N.maxerror .0005 to 0 (Nothing happened
You may not have noticed the change in behaviour
but these parameter changes are required
Please Log in or Create an account to join the conversation.
- echesortux
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 46
- Thank you received: 1
02 Nov 2016 13:31 - 02 Nov 2016 13:34 #82344
by echesortux
Replied by echesortux on topic Mesa 5i25/7i76 + driver leadshine DM2282 digital
Hi guys!
The engine makes noise being stopped, as I put the principle can not give the correct values to the parameters.
Step_Len: 2500
Step Space: 2500
Dir_hold: 5000
Dir_Setup: 5000
only accepts exceeding 5000
today we have entered these:
Step_Len: 5000
Step Space: 5000
Dir_hold: 6000
Dir_Setup: 6000
We not yet verified the voltage, tomorrow we will.
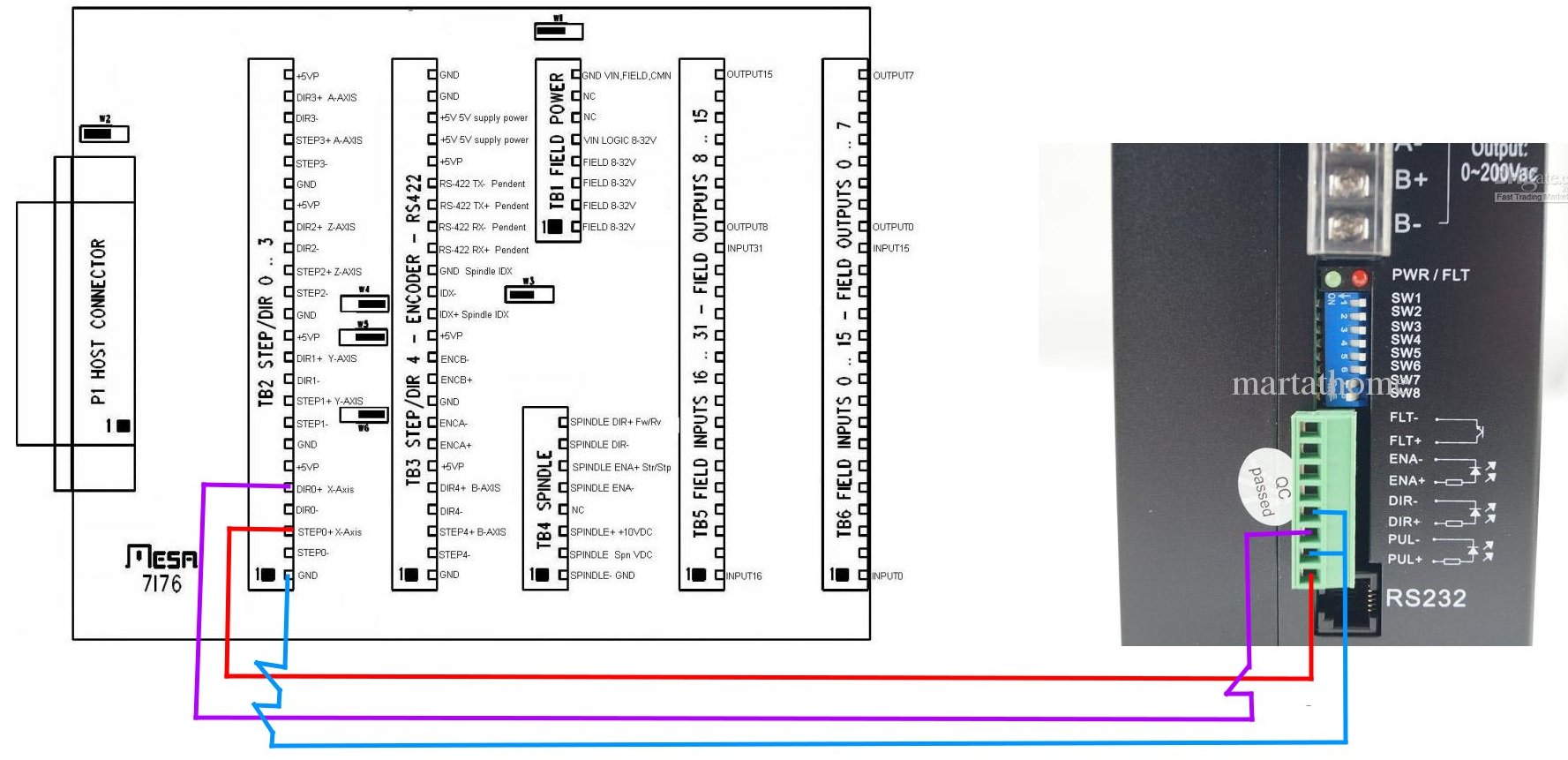
We also want to change the connection of the cables, so what would you say PCW:
Doing this will improve?
The engine makes noise being stopped, as I put the principle can not give the correct values to the parameters.
Step_Len: 2500
Step Space: 2500
Dir_hold: 5000
Dir_Setup: 5000
only accepts exceeding 5000
today we have entered these:
Step_Len: 5000
Step Space: 5000
Dir_hold: 6000
Dir_Setup: 6000
First thing I would is change the P term to 1000 (was 50)
The wiring looks correct but sometimes the differential outputs do not work very well with high input
current drives so it might be worth trying with common ground wiring (connect PUL- AND DIR- to ground instead of 7I76 outputs and leave the 7I76 dir- and step- outputs unconnected)
You might also verify that the 5V at the 7I76 is not less then 4.75V or so
We not yet verified the voltage, tomorrow we will.
We also want to change the connection of the cables, so what would you say PCW:
Doing this will improve?
Last edit: 02 Nov 2016 13:34 by echesortux.
Please Log in or Create an account to join the conversation.
- squan09
- Offline
- Senior Member
-
Less
More
- Posts: 47
- Thank you received: 0
12 Jan 2017 01:22 #85640
by squan09
Replied by squan09 on topic Mesa 5i25/7i76 + driver leadshine DM2282 digital
Have you had any luck solving this issue? I am experiencing similar problem now using the 5i25/7i76 and leadshine DM556 drives.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17977
- Thank you received: 5275
12 Jan 2017 01:27 #85642
by PCW
Replied by PCW on topic Mesa 5i25/7i76 + driver leadshine DM2282 digital
What exact issue do you have?
Please Log in or Create an account to join the conversation.
- squan09
- Offline
- Senior Member
-
Less
More
- Posts: 47
- Thank you received: 0
12 Jan 2017 01:53 #85644
by squan09
Replied by squan09 on topic Mesa 5i25/7i76 + driver leadshine DM2282 digital
I have to set Step Len and Step Space = 3500 to get the motor to move, but the drive manual specifies 2500. I'm not sure if this is related, but I also get a joint following error with speeds above ~400RPM. I am able to get much faster speeds out of the motor when using the autotune program that came with the drives. I have also set the P = 1000 and pid.N.maxerror = 0
Please Log in or Create an account to join the conversation.
- echesortux
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 46
- Thank you received: 1
12 Jan 2017 02:18 #85645
by echesortux
Replied by echesortux on topic Mesa 5i25/7i76 + driver leadshine DM2282 digital
Hello Squan09 unfortunatly we couldn't solve the problem completly. what we do was make a downgrade from linuxcnc 2.7 to 2.6 that solve the problem a bit but we are not able to set the step space less than 3500. at 2500 the motors doesn't move. tomorrow i will post my configuration maybe it can be useful for you.
Please Log in or Create an account to join the conversation.
- squan09
- Offline
- Senior Member
-
Less
More
- Posts: 47
- Thank you received: 0
12 Jan 2017 02:27 #85646
by squan09
Replied by squan09 on topic Mesa 5i25/7i76 + driver leadshine DM2282 digital
Thanks. Do you know roughly how fast you are able to move the motors in RPM? Is it the servo period that will limit the max speeds or are there other parameters that I can change to maximize RPMs?
Please Log in or Create an account to join the conversation.
Moderators: cmorley
- Configuring LinuxCNC
- Configuration Tools
- PnCConf Wizard
- Mesa 5i25/7i76 + driver leadshine DM2282 digital
Time to create page: 0.135 seconds