Problem with MESA 7i76e and DQ542MA drivers
- rodw
-

- Offline
- Platinum Member
-

- Posts: 12013
- Thank you received: 4096
Your joints need HOME_SEQUENCE= to be set and for Y to be equal to -1 on both axes.
See linuxcnc.org/docs/devel/html/config/ini-homing.html
Please Log in or Create an account to join the conversation.
- jmonteiro
- Offline
- New Member
-

- Posts: 14
- Thank you received: 0
It will be related to the changes to support joint axes.
Your joints need HOME_SEQUENCE= to be set and for Y to be equal to -1 on both axes.
See linuxcnc.org/docs/devel/html/config/ini-homing.html
I just tried that but then I cannot move at all... let me try again, Will let you know in 15 minutes or so.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
- Posts: 12013
- Thank you received: 4096
forum.linuxcnc.org/47-hal-examples/34072...antry-example#106523
Please Log in or Create an account to join the conversation.
- jmonteiro
- Offline
- New Member
-
- Posts: 14
- Thank you received: 0
"Homing is REQUIRED to jog requested coordinate because joint (1) in home_sequence is negative (-1)"
And I cannot seem to be able to Home Y at all, it is not even on my UI. I see the Home X and Home Z but no Home Y. And the "Home Axis" does not unblock it, still get the same message.
I guess I need to compare my config with the one you posted and see if I notice any differences.
Please Log in or Create an account to join the conversation.
- jmonteiro
- Offline
- New Member
-
- Posts: 14
- Thank you received: 0
net z-is-homed halui.joint.2.is-homed
but I needed to have:
net y2-is-homed halui.joint.2.is-homed
net z-is-homed halui.joint.3.is-homed
Now I can home the 2 Y Axis and it moves both motors. Thank you so much Rod
")
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
- Posts: 12013
- Thank you received: 4096
Ok, I figured it out, I was missing a line on the HAL file, I used to have:
net z-is-homed halui.joint.2.is-homed
but I needed to have:
net y2-is-homed halui.joint.2.is-homed
net z-is-homed halui.joint.3.is-homed
Now I can home the 2 Y Axis and it moves both motors. Thank you so much Rod
Cool!
Please Log in or Create an account to join the conversation.
- jmonteiro
- Offline
- New Member
-
- Posts: 14
- Thank you received: 0
I added proximity switches to my CNC and I can home the machine fine on both X and Z using the proximity switch but not on Y. I have 2 axis in parallel, so both Y0 and Y1 are part of my Y, both have a proximity switch on the zero but I can't seem to be able to use them at all. I don't even have a "Home Y" on my user inter

I found out the problem, it is working now
Attached are my ini and hal files.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
- Posts: 12013
- Thank you received: 4096
Try Home All instead
Until you home all, you are in joint mode and you don't have a Y axis due to the dual motors (joints) and you can't move them on their own
Please Log in or Create an account to join the conversation.
- jmonteiro
- Offline
- New Member
-
- Posts: 14
- Thank you received: 0
you are correct "Home All" is now working fine and it even squares it off fine Now I just need to get my Delta VFD-E and spindle working with LinuxCNC, after that I can finally use it.
Please Log in or Create an account to join the conversation.
- dgarrett
- Offline
- Platinum Member
-
- Posts: 492
- Thank you received: 297
Use of the "Home All" button itself is not required as one can homeUntil you home all, you are in joint mode and you don't
have a Y axis due to the dual motors (joints) and you can't
move them on their own
individual joints or synchronized joints as groups. Coordinated (axis)
movement is not available until ALL joints are homed whether you use
"Home All" or home joints (or joint groups) individually.
NOTE:
Ref: linuxcnc.org/docs/master/html/config/ini...l#_inhibiting_homingBy default, the synchronization provisions disallow joint jogging prior
to homing in order to prevent joint jogs that could misalign the machine (gantry
racking for example).
The above reference illustrates a method to move individual joints prior to homing
but it is not likely appropriate for a gantry with a racking liability.
Properly specified synchronized joints home together.
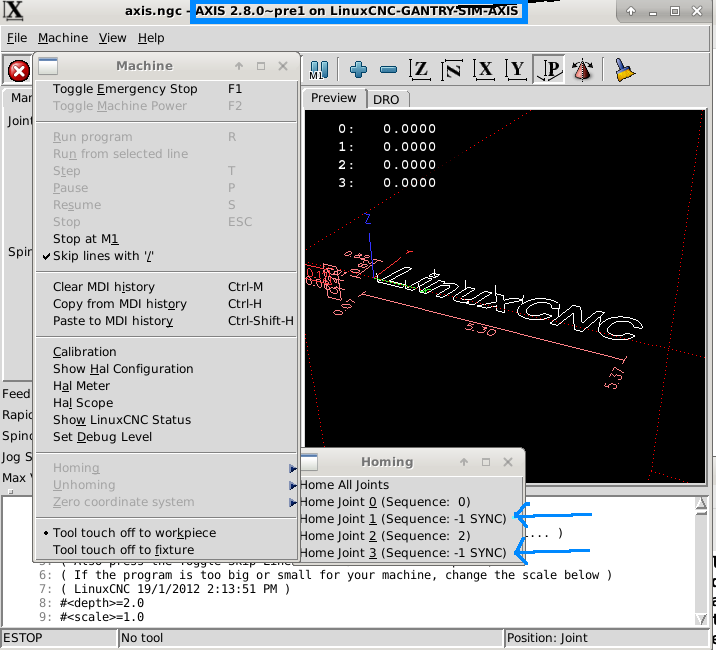
As an example, try the simulation config
configs/sim/axis/gantry.ini.
(No special hardware is required for sim configs)
This sim config uses joints 1 and 3 for the y coordinate:
[KINS]
JOINTS=4
KINEMATICS = trivkins coordinates=XYZY kinstype=BOTH
...
[TRAJ]
COORDINATES = XYZY
...
[JOINT_0]
HOME_SEQUENCE = 0
[JOINT_1]
HOME_SEQUENCE = -1
[JOINT_2]
HOME_SEQUENCE = 2
[JOINT_3]
HOME_SEQUENCE = -1(kinstype=BOTH is useful and recommended as it clarifies the transition
from joint mode to cartesian mode once all joints are homed)
The axis gui provices dropdowns that allow homing of indivdual joints
or grouped joints when they are configured for synchronization.
Example:
For more info on homing, see:
Ref: linuxcnc.org/docs/master/html/config/ini-homing.html
Please Log in or Create an account to join the conversation.