- GCode and Part Programs
- O Codes (subroutines) and NGCGUI
- Remap 3D Cubic Spline Interpolation code by Python
Remap 3D Cubic Spline Interpolation code by Python
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4742
- Thank you received: 2125
10 Oct 2024 14:08 - 10 Oct 2024 14:30 #311727
by Aciera
Replied by Aciera on topic Remap 3D Cubic Spline Interpolation code by Python
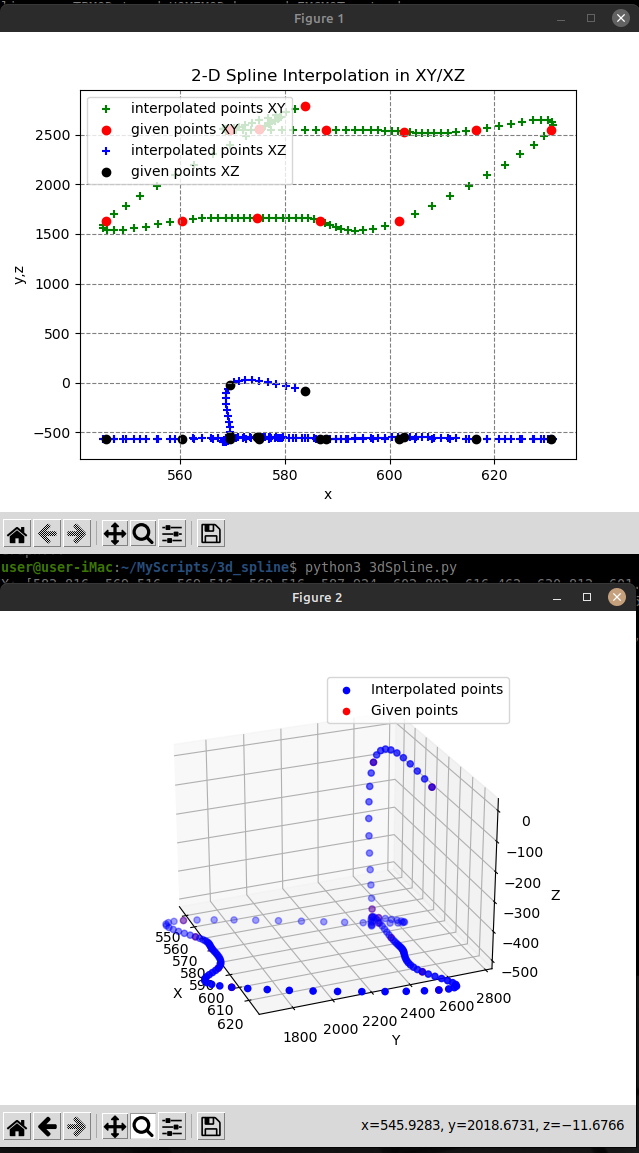
Modified the script to accept any sequence of point coordinates (x,y,z) read from a file called 'points_input.txt' in the same directory as the '3dSpline.py' script and outputs the interpolated points to a file called 'output_file.txt':
The 'points_input.txt' for the example below:
which gives me this output:
 [/code]
[/code]
And the 'output_file.txt' content created:
#! /usr/local/bin/python3.6
"""
3-D spline interpolation
(with graph drawing by matplotlib)
"""
import matplotlib.pyplot as plt
import sys
import os
import traceback
class SplineInterpolation:
def __init__(self, ts, ds):
""" Initialization
:param list ts: item number list of given points
:param list ds: coordinate list of given points
"""
self.ts, self.ds = ts, ds
self.n = len(self.ts) - 1
h = self.__calc_h()
w = self.__calc_w(h)
matrix = self.__gen_matrix(h, w)
v = [0] + self.__gauss_jordan(matrix) + [0]
self.b = self.__calc_b(v)
self.a = self.__calc_a(v)
self.d = self.__calc_d()
self.c = self.__calc_c(v)
def interpolate(self, t):
""" Interpolation
:param float t: value for a interpolate target
:return float : computated y-value
"""
try:
i = self.__search_i(t)
return self.a[i] * (t - self.ts[i]) ** 3 \
+ self.b[i] * (t - self.ts[i]) ** 2 \
+ self.c[i] * (t - self.ts[i]) \
+ self.d[i]
except Exception as e:
raise
def __calc_h(self):
""" H calculation
:return list: h-values
"""
try:
return [self.ts[i + 1] - self.ts[i] for i in range(self.n)]
except Exception as e:
raise
def __calc_w(self, h):
""" W calculation
:param list h: h-values
:return list : w-values
"""
try:
return [
6 * ((self.ds[i + 1] - self.ds[i]) / h[i]
- (self.ds[i] - self.ds[i - 1]) / h[i - 1])
for i in range(1, self.n)
]
except Exception as e:
raise
def __gen_matrix(self, h, w):
""" Matrix generation
:param list h: h-values
:param list w: w-values
:return list mtx: generated 2-D matrix
"""
mtx = [[0 for _ in range(self.n)] for _ in range(self.n - 1)]
try:
for i in range(self.n - 1):
mtx[i][i] = 2 * (h[i] + h[i + 1])
mtx[i][-1] = w[i]
if i == 0:
continue
mtx[i - 1][i] = h[i]
mtx[i][i - 1] = h[i]
return mtx
except Exception as e:
raise
def __gauss_jordan(self, matrix):
""" Solving of simultaneous linear equations
with Gauss-Jordan's method
:param list mtx: list of 2-D matrix
:return list v: answers list of simultaneous linear equations
"""
v = []
n = self.n - 1
try:
for k in range(n):
p = matrix[k][k]
for j in range(k, n + 1):
matrix[k][j] /= p
for i in range(n):
if i == k:
continue
d = matrix[i][k]
for j in range(k, n + 1):
matrix[i][j] -= d * matrix[k][j]
for row in matrix:
v.append(row[-1])
return v
except Exception as e:
raise
def __calc_a(self, v):
""" A calculation
:param list v: v-values
:return list : a-values
"""
try:
return [
(v[i + 1] - v[i])
/ (6 * (self.ts[i + 1] - self.ts[i]))
for i in range(self.n)
]
except Exception as e:
raise
def __calc_b(self, v):
""" B calculation
:param list v: v-values
:return list : b-values
"""
try:
return [v[i] / 2.0 for i in range(self.n)]
except Exception as e:
raise
def __calc_c(self, v):
""" C calculation
:param list v: v-values
:return list : c-values
"""
try:
return [
(self.ds[i + 1] - self.ds[i]) / (self.ts[i + 1] - self.ts[i]) \
- (self.ts[i + 1] - self.ts[i]) * (2 * v[i] + v[i + 1]) / 6
for i in range(self.n)
]
except Exception as e:
raise
def __calc_d(self):
""" D calculation
:return list: c-values
"""
try:
return self.ds
except Exception as e:
raise
def __search_i(self, t):
""" Index searching
:param float t: t-value
:return int i: index
"""
i, j = 0, len(self.ts) - 1
try:
while i < j:
k = (i + j) // 2
if self.ts[k] < t:
i = k + 1
else:
j = k
if i > 0:
i -= 1
return i
except Exception as e:
raise
class Graph:
def __init__(self, xs_0, ys_0, zs_0, xs_1, ys_1, zs_1):
self.xs_0, self.ys_0, self.zs_0, self.xs_1, self.ys_1, self.zs_1 = xs_0, ys_0, zs_0, xs_1, ys_1, zs_1
def plot2d(self):
try:
plt.title("2-D Spline Interpolation in XY/XZ")
plt.scatter(
self.xs_1, self.ys_1, c = "g",
label = "interpolated points XY", marker = "+"
)
plt.scatter(
self.xs_0, self.ys_0, c = "r",
label = "given points XY"
)
plt.scatter(
self.xs_1, self.zs_1, c = "b",
label = "interpolated points XZ", marker = "+"
)
plt.scatter(
self.xs_0, self.zs_0, c = "k",
label = "given points XZ"
)
plt.xlabel("x")
plt.ylabel("y,z")
plt.legend(loc = 2)
plt.grid(color = "gray", linestyle = "--")
#plt.show()
#plt.savefig("spline_interpolation.png")
except Exception as e:
raise
def plot3d(self):
ax = plt.figure().add_subplot(projection='3d')
x = self.xs_1
y = self.ys_1
z = self.zs_1
ax.scatter(x, y, z, c='b', label='Interpolated points')
ax.scatter(X, Y, Z, c='r', label='Given points')
# Make legend, set axes limits and labels
ax.legend()
ax.set_xlim(min(X),max(X))
ax.set_ylim(min(Y),max(Y))
ax.set_zlim(min(Z),max(Z))
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
# Customize the view angle so it's easier to see that the scatter points lie
# on the plane y=0
ax.view_init(elev=20., azim=-35)
plt.show()
if __name__ == '__main__':
# (N + 1) points
T,X,Y,Z = [],[],[],[]
fileName = './points_input.txt'
import csv
with open(fileName, 'r') as f:
reader = csv.reader(f)
point_data = list(reader)
for line in point_data:
X.append(float(line[0]))
Y.append(float(line[1]))
Z.append(float(line[2]))
print('X:', X)
print('Y:', Y)
print('Z:', Z)
n=0
for x in X:
T.append(n+1.0)
n += 1
print('T: ', T)
#T = [1.0,2.0,3.0,4.0,5.0,6.0]
#X = [0.0, 2.0, 3.0, 5.0, 7.0, 8.0]
#Y = [0.8, 2.8, 3.2, 1.9, 4.5, 2.5]
#Z = [-0.5, 1.8, 2.2, 0.9, 3.5, -1.5]
S = 0.1 # Step for interpolation
S_1 = 1 / S # Inverse of S
xs_g, ys_g, zs_g = [], [], [] # List for graph
try:
# 3-D spline interpolation
si = SplineInterpolation(T, X)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
x= si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, x))
xs_g.append(x)
si = SplineInterpolation(T, Y)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
y = si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, y))
ys_g.append(y)
si = SplineInterpolation(T, Z)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
z = si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, z))
zs_g.append(z)
# Write output to file
file_out = 'output_file.txt'
print('Writing output to ',file_out)
n=0
output = open(file_out, 'w')
for x in xs_g:
string=("G0 X{:8.4f} Y{:8.4f} Z{:8.4f}\n".format(xs_g[n], ys_g[n], zs_g[n]))
output.write(string)
n += 1
# Closing file
output.close()
# Graph drawing
g = Graph(X, Y, Z, xs_g, ys_g, zs_g)
g.plot2d()
g.plot3d()
except Exception as e:
traceback.print_exc()
sys.exit(1)The 'points_input.txt' for the example below:
[code]583.8160, 2785.3929, -80.0100,
569.5160, 2551.3630, -20.8590,
569.5160, 2551.3630, -534.4340,
569.5160, 2551.3630, -563.0960,
587.9240, 2551.3630, -562.6310,
602.8020, 2531.2934, -547.8260,
616.4620, 2550.4623, -563.0180,
630.8120, 2550.4623, -563.9780,
601.7700, 1631.0440, -563.0410,
586.6920, 1633.2648, -561.9940,
574.5840, 1656.0775, -546.8950,
560.3560, 1634.1061, -561.9290,
545.8120, 1634.7045, -562.6420,
575.0200, 2556.2819, -563.3090,
575.0200, 2556.2819, -543.9050, which gives me this output:
And the 'output_file.txt' content created:
G0 X583.8160 Y2785.3929 Z-80.0100
G0 X581.9705 Y2755.7769 Z-55.4991
G0 X580.1501 Y2726.5375 Z-32.1152
G0 X578.3801 Y2698.0512 Z-10.9853
G0 X576.6857 Y2670.6945 Z 6.7635
G0 X575.0920 Y2644.8440 Z 20.0042
G0 X573.6242 Y2620.8762 Z 27.6098
G0 X572.3075 Y2599.1676 Z 28.4534
G0 X571.1671 Y2580.0949 Z 21.4077
G0 X570.2282 Y2564.0345 Z 5.3460
G0 X569.5160 Y2551.3630 Z-20.8590
G0 X569.0447 Y2542.3144 Z-57.7799
G0 X568.7852 Y2536.5528 Z-103.7722
G0 X568.6972 Y2533.5994 Z-156.6372
G0 X568.7407 Y2532.9760 Z-214.1762
G0 X568.8756 Y2534.2037 Z-274.1904
G0 X569.0617 Y2536.8043 Z-334.4811
G0 X569.2589 Y2540.2990 Z-392.8496
G0 X569.4271 Y2544.2094 Z-447.0970
G0 X569.5262 Y2548.0569 Z-495.0248
G0 X569.5160 Y2551.3630 Z-534.4340
G0 X569.3714 Y2553.7511 Z-563.7128
G0 X569.1269 Y2555.2528 Z-583.5966
G0 X568.8320 Y2556.0013 Z-595.4073
G0 X568.5363 Y2556.1302 Z-600.4671
G0 X568.2892 Y2555.7728 Z-600.0982
G0 X568.1403 Y2555.0627 Z-595.6226
G0 X568.1390 Y2554.1332 Z-588.3625
G0 X568.3348 Y2553.1178 Z-579.6400
G0 X568.7773 Y2552.1499 Z-570.7771
G0 X569.5160 Y2551.3630 Z-563.0960
G0 X570.5842 Y2550.8590 Z-557.6393
G0 X571.9506 Y2550.6142 Z-554.3315
G0 X573.5678 Y2550.5734 Z-552.8176
G0 X575.3883 Y2550.6814 Z-552.7427
G0 X577.3646 Y2550.8830 Z-553.7517
G0 X579.4494 Y2551.1230 Z-555.4896
G0 X581.5952 Y2551.3462 Z-557.6015
G0 X583.7545 Y2551.4974 Z-559.7324
G0 X585.8800 Y2551.5214 Z-561.5272
G0 X587.9240 Y2551.3630 Z-562.6310
G0 X589.8486 Y2550.9707 Z-562.7790
G0 X591.6530 Y2550.3078 Z-562.0676
G0 X593.3460 Y2549.3412 Z-560.6834
G0 X594.9361 Y2548.0378 Z-558.8128
G0 X596.4320 Y2546.3645 Z-556.6426
G0 X597.8424 Y2544.2884 Z-554.3592
G0 X599.1760 Y2541.7762 Z-552.1493
G0 X600.4413 Y2538.7951 Z-550.1994
G0 X601.6471 Y2535.3118 Z-548.6961
G0 X602.8020 Y2531.2934 Z-547.8260
G0 X603.9177 Y2526.8028 Z-547.7237
G0 X605.0178 Y2522.2873 Z-548.3158
G0 X606.1291 Y2518.2901 Z-549.4772
G0 X607.2782 Y2515.3547 Z-551.0824
G0 X608.4918 Y2514.0242 Z-553.0061
G0 X609.7966 Y2514.8420 Z-555.1232
G0 X611.2194 Y2518.3514 Z-557.3082
G0 X612.7867 Y2525.0958 Z-559.4358
G0 X614.5254 Y2535.6183 Z-561.3809
G0 X616.4620 Y2550.4623 Z-563.0180
G0 X618.6015 Y2569.6655 Z-564.2510
G0 X620.8617 Y2591.2429 Z-565.1000
G0 X623.1386 Y2612.7039 Z-565.6142
G0 X625.3283 Y2631.5580 Z-565.8430
G0 X627.3268 Y2645.3144 Z-565.8355
G0 X629.0301 Y2651.4827 Z-565.6410
G0 X630.3342 Y2647.5723 Z-565.3088
G0 X631.1352 Y2631.0924 Z-564.8881
G0 X631.3291 Y2599.5526 Z-564.4280
G0 X630.8120 Y2550.4623 Z-563.9780
G0 X629.5179 Y2482.4155 Z-563.5794
G0 X627.5335 Y2398.3451 Z-563.2423
G0 X624.9835 Y2302.2688 Z-562.9691
G0 X621.9925 Y2198.2040 Z-562.7621
G0 X618.6853 Y2090.1684 Z-562.6236
G0 X615.1865 Y1982.1797 Z-562.5561
G0 X611.6209 Y1878.2552 Z-562.5617
G0 X608.1131 Y1782.4128 Z-562.6428
G0 X604.7879 Y1698.6698 Z-562.8018
G0 X601.7700 Y1631.0440 Z-563.0410
G0 X599.1548 Y1582.4611 Z-563.3543
G0 X596.9208 Y1551.4794 Z-563.7023
G0 X595.0174 Y1535.5657 Z-564.0372
G0 X593.3939 Y1532.1864 Z-564.3110
G0 X591.9996 Y1538.8083 Z-564.4760
G0 X590.7838 Y1552.8978 Z-564.4844
G0 X589.6959 Y1571.9216 Z-564.2881
G0 X588.6850 Y1593.3463 Z-563.8396
G0 X587.7006 Y1614.6385 Z-563.0908
G0 X586.6920 Y1633.2648 Z-561.9940
G0 X585.6189 Y1647.2323 Z-560.5268
G0 X584.4829 Y1656.7102 Z-558.7692
G0 X583.2962 Y1662.4082 Z-556.8264
G0 X582.0709 Y1665.0362 Z-554.8039
G0 X580.8189 Y1665.3038 Z-552.8070
G0 X579.5525 Y1663.9208 Z-550.9411
G0 X578.2837 Y1661.5969 Z-549.3115
G0 X577.0247 Y1659.0419 Z-548.0238
G0 X575.7874 Y1656.9655 Z-547.1831
G0 X574.5840 Y1656.0775 Z-546.8950
G0 X573.4199 Y1656.8530 Z-547.2291
G0 X572.2735 Y1658.8288 Z-548.1125
G0 X571.1167 Y1661.3070 Z-549.4367
G0 X569.9212 Y1663.5899 Z-551.0932
G0 X568.6588 Y1664.9796 Z-552.9732
G0 X567.3014 Y1664.7782 Z-554.9684
G0 X565.8206 Y1662.2880 Z-556.9701
G0 X564.1882 Y1656.8112 Z-558.8699
G0 X562.3761 Y1647.6498 Z-560.5590
G0 X560.3560 Y1634.1061 Z-561.9290
G0 X558.1230 Y1616.0128 Z-562.8998
G0 X555.7654 Y1595.3251 Z-563.5050
G0 X553.3949 Y1574.5286 Z-563.8068
G0 X551.1229 Y1556.1090 Z-563.8672
G0 X549.0612 Y1542.5520 Z-563.7486
G0 X547.3213 Y1536.3432 Z-563.5128
G0 X546.0148 Y1539.9684 Z-563.2222
G0 X545.2534 Y1555.9132 Z-562.9387
G0 X545.1486 Y1586.6634 Z-562.7246
G0 X545.8120 Y1634.7045 Z-562.6420
G0 X547.3111 Y1701.4656 Z-562.7336
G0 X549.5362 Y1784.1490 Z-562.9644
G0 X552.3336 Y1878.9001 Z-563.2803
G0 X555.5494 Y1981.8646 Z-563.6268
G0 X559.0300 Y2089.1879 Z-563.9497
G0 X562.6214 Y2197.0156 Z-564.1946
G0 X566.1699 Y2301.4934 Z-564.3073
G0 X569.5217 Y2398.7666 Z-564.2335
G0 X572.5230 Y2484.9810 Z-563.9188
G0 X575.0200 Y2556.2819 Z-563.3090
G0 X576.8955 Y2609.7702 Z-562.3646
G0 X578.1788 Y2646.3675 Z-561.1056
G0 X578.9356 Y2667.9505 Z-559.5671
G0 X579.2317 Y2676.3960 Z-557.7840
G0 X579.1330 Y2673.5808 Z-555.7912
G0 X578.7053 Y2661.3818 Z-553.6236
G0 X578.0143 Y2641.6755 Z-551.3163
G0 X577.1259 Y2616.3390 Z-548.9041
G0 X576.1058 Y2587.2488 Z-546.4220
G0 X575.0200 Y2556.2819 Z-543.9050Attachments:
Last edit: 10 Oct 2024 14:30 by Aciera.
The following user(s) said Thank You: Todd Zuercher
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4742
- Thank you received: 2125
10 Oct 2024 15:56 - 10 Oct 2024 15:56 #311748
by Aciera
Replied by Aciera on topic Remap 3D Cubic Spline Interpolation code by Python
Just as an explanation.
The script basically calculates a spline for each axis separately (ie one of X, one for Y and one for Z). The resulting 3D curve is the combination of the individual x,y,z values at a given iteration index (t):
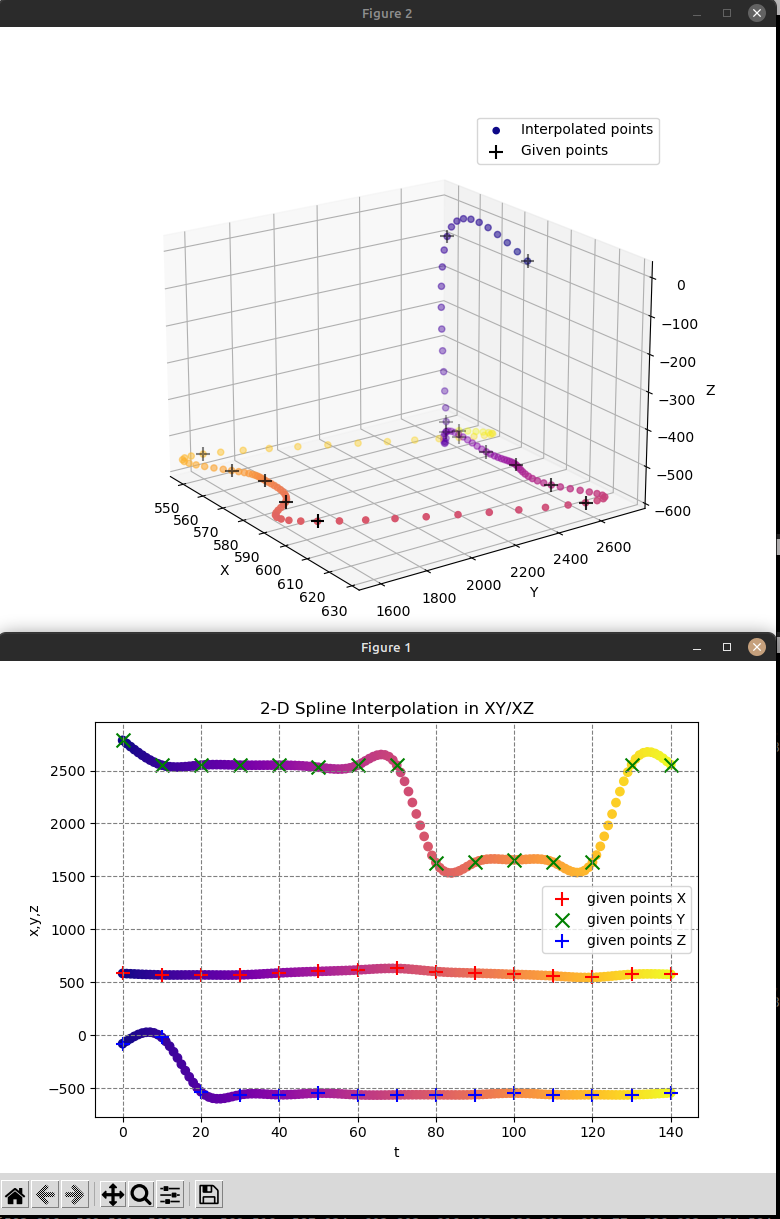
The script basically calculates a spline for each axis separately (ie one of X, one for Y and one for Z). The resulting 3D curve is the combination of the individual x,y,z values at a given iteration index (t):
Attachments:
Last edit: 10 Oct 2024 15:56 by Aciera.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Offline
- Platinum Member
-

Less
More
- Posts: 4756
- Thank you received: 1459
10 Oct 2024 18:55 #311763
by Todd Zuercher
Replied by Todd Zuercher on topic Remap 3D Cubic Spline Interpolation code by Python
Interesting. I had no idea that a spline could be one dimensional. Would the same math mathematical process work to expanded to 5 (or more) axis?
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4742
- Thank you received: 2125
11 Oct 2024 06:21 #311794
by Aciera
Replied by Aciera on topic Remap 3D Cubic Spline Interpolation code by Python
Well, it isn't _really_ one dimensional but rather a curve in the t/x, t/y or t/z space with 't' being a parameter that increases like time or arc length. This works for any number of axes but for motion control it's usefulness would be very limited as we don't have much control over the deviation of the resulting path from the polyline that connects the given points.
Please Log in or Create an account to join the conversation.
- jurod
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

Less
More
- Posts: 68
- Thank you received: 6
17 Oct 2024 06:41 #312342
by jurod
Replied by jurod on topic Remap 3D Cubic Spline Interpolation code by Python
Perfect, I'm going to try.
Please Log in or Create an account to join the conversation.
- jurod
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 68
- Thank you received: 6
10 Nov 2024 17:46 - 11 Nov 2024 16:50 #314195
by jurod
Replied by jurod on topic Remap 3D Cubic Spline Interpolation code by Python
Very well. Thanks.
I also made adjustments for the XYZA and XYZBC axes.
Axes XYZA:
Axes XYZBC:
I also made adjustments for the XYZA and XYZBC axes.
Axes XYZA:
#! /usr/bin/python3
"""
3-D spline interpolation
(with graph drawing by matplotlib)
"""
import matplotlib.pyplot as plt
import sys
import os
import traceback
class SplineInterpolation:
def __init__(self, ts, ds):
""" Initialization
:param list ts: item number list of given points
:param list ds: coordinate list of given points
"""
self.ts, self.ds = ts, ds
self.n = len(self.ts) - 1
h = self.__calc_h()
w = self.__calc_w(h)
matrix = self.__gen_matrix(h, w)
v = [0] + self.__gauss_jordan(matrix) + [0]
self.b = self.__calc_b(v)
self.a = self.__calc_a(v)
self.d = self.__calc_d()
self.c = self.__calc_c(v)
def interpolate(self, t):
""" Interpolation
:param float t: value for a interpolate target
:return float : computated y-value
"""
try:
i = self.__search_i(t)
return self.a[i] * (t - self.ts[i]) ** 3 \
+ self.b[i] * (t - self.ts[i]) ** 2 \
+ self.c[i] * (t - self.ts[i]) \
+ self.d[i]
except Exception as e:
raise
def __calc_h(self):
""" H calculation
:return list: h-values
"""
try:
return [self.ts[i + 1] - self.ts[i] for i in range(self.n)]
except Exception as e:
raise
def __calc_w(self, h):
""" W calculation
:param list h: h-values
:return list : w-values
"""
try:
return [
6 * ((self.ds[i + 1] - self.ds[i]) / h[i]
- (self.ds[i] - self.ds[i - 1]) / h[i - 1])
for i in range(1, self.n)
]
except Exception as e:
raise
def __gen_matrix(self, h, w):
""" Matrix generation
:param list h: h-values
:param list w: w-values
:return list mtx: generated 2-D matrix
"""
mtx = [[0 for _ in range(self.n)] for _ in range(self.n - 1)]
try:
for i in range(self.n - 1):
mtx[i][i] = 2 * (h[i] + h[i + 1])
mtx[i][-1] = w[i]
if i == 0:
continue
mtx[i - 1][i] = h[i]
mtx[i][i - 1] = h[i]
return mtx
except Exception as e:
raise
def __gauss_jordan(self, matrix):
""" Solving of simultaneous linear equations
with Gauss-Jordan's method
:param list mtx: list of 2-D matrix
:return list v: answers list of simultaneous linear equations
"""
v = []
n = self.n - 1
try:
for k in range(n):
p = matrix[k][k]
for j in range(k, n + 1):
matrix[k][j] /= p
for i in range(n):
if i == k:
continue
d = matrix[i][k]
for j in range(k, n + 1):
matrix[i][j] -= d * matrix[k][j]
for row in matrix:
v.append(row[-1])
return v
except Exception as e:
raise
def __calc_a(self, v):
""" A calculation
:param list v: v-values
:return list : a-values
"""
try:
return [
(v[i + 1] - v[i])
/ (6 * (self.ts[i + 1] - self.ts[i]))
for i in range(self.n)
]
except Exception as e:
raise
def __calc_b(self, v):
""" B calculation
:param list v: v-values
:return list : b-values
"""
try:
return [v[i] / 2.0 for i in range(self.n)]
except Exception as e:
raise
def __calc_c(self, v):
""" C calculation
:param list v: v-values
:return list : c-values
"""
try:
return [
(self.ds[i + 1] - self.ds[i]) / (self.ts[i + 1] - self.ts[i]) \
- (self.ts[i + 1] - self.ts[i]) * (2 * v[i] + v[i + 1]) / 6
for i in range(self.n)
]
except Exception as e:
raise
def __calc_d(self):
""" D calculation
:return list: c-values
"""
try:
return self.ds
except Exception as e:
raise
def __search_i(self, t):
""" Index searching
:param float t: t-value
:return int i: index
"""
i, j = 0, len(self.ts) - 1
try:
while i < j:
k = (i + j) // 2
if self.ts[k] < t:
i = k + 1
else:
j = k
if i > 0:
i -= 1
return i
except Exception as e:
raise
class Graph:
def __init__(self, xs_0, ys_0, zs_0, xs_1, ys_1, zs_1):
self.xs_0, self.ys_0, self.zs_0, self.xs_1, self.ys_1, self.zs_1 = xs_0, ys_0, zs_0, xs_1, ys_1, zs_1
def plot2d(self):
try:
plt.title("2-D Spline Interpolation in XY/XZ")
plt.scatter(
self.xs_1, self.ys_1, c = "g",
label = "interpolated points XY", marker = "+"
)
plt.scatter(
self.xs_0, self.ys_0, c = "r",
label = "given points XY"
)
plt.scatter(
self.xs_1, self.zs_1, c = "b",
label = "interpolated points XZ", marker = "+"
)
plt.scatter(
self.xs_0, self.zs_0, c = "k",
label = "given points XZ"
)
plt.xlabel("x")
plt.ylabel("y,z")
plt.legend(loc = 2)
plt.grid(color = "gray", linestyle = "--")
#plt.show()
#plt.savefig("spline_interpolation.png")
except Exception as e:
raise
def plot3d(self):
ax = plt.figure().add_subplot(projection='3d')
x = self.xs_1
y = self.ys_1
z = self.zs_1
ax.scatter(x, y, z, c='b', label='Interpolated points')
ax.scatter(X, Y, Z, c='r', label='Given points')
# Make legend, set axes limits and labels
ax.legend()
ax.set_xlim(min(X),max(X))
ax.set_ylim(min(Y),max(Y))
ax.set_zlim(min(Z),max(Z))
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
# Customize the view angle so it's easier to see that the scatter points lie
# on the plane y=0
ax.view_init(elev=20., azim=-35)
plt.show()
if __name__ == '__main__':
# (N + 1) points
T,X,Y,Z,A = [],[],[],[],[]
fileName = './points_input.txt'
import csv
with open(fileName, 'r') as f:
reader = csv.reader(f)
point_data = list(reader)
for line in point_data:
X.append(float(line[0]))
Y.append(float(line[1]))
Z.append(float(line[2]))
A.append(float(line[3]))
print('X:', X)
print('Y:', Y)
print('Z:', Z)
print('A:', A)
n=0
for x in X:
T.append(n+1.0)
n += 1
print('T: ', T)
#T = [1.0,2.0,3.0,4.0,5.0,6.0]
#X = [0.0, 2.0, 3.0, 5.0, 7.0, 8.0]
#Y = [0.8, 2.8, 3.2, 1.9, 4.5, 2.5]
#Z = [-0.5, 1.8, 2.2, 0.9, 3.5, -1.5]
S = 0.1 # Step for interpolation
S_1 = 1 / S # Inverse of S
xs_g, ys_g, zs_g, as_g = [], [], [], [] # List for graph
try:
# 3-D spline interpolation
si = SplineInterpolation(T, X)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
x= si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, x))
xs_g.append(x)
si = SplineInterpolation(T, Y)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
y = si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, y))
ys_g.append(y)
si = SplineInterpolation(T, Z)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
z = si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, z))
zs_g.append(z)
si = SplineInterpolation(T, A)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
a = si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, z))
as_g.append(a)
# Write output to file
file_out = 'output_file.txt'
print('Writing output to ',file_out)
n=0
output = open(file_out, 'w')
for x in xs_g:
string=("G1 X{:4.2f} Y{:4.2f} Z{:4.2f} A{:4.2f}\n".format(xs_g[n], ys_g[n], zs_g[n], as_g[n]))
output.write(string)
n += 1
# Closing file
output.close()
# Graph drawing
g = Graph(X, Y, Z, xs_g, ys_g, zs_g)
g.plot2d()
g.plot3d()
except Exception as e:
traceback.print_exc()
sys.exit(1)Axes XYZBC:
#! /usr/bin/python3
"""
3-D spline interpolation
(with graph drawing by matplotlib)
"""
import matplotlib.pyplot as plt
import sys
import os
import traceback
class SplineInterpolation:
def __init__(self, ts, ds):
""" Initialization
:param list ts: item number list of given points
:param list ds: coordinate list of given points
"""
self.ts, self.ds = ts, ds
self.n = len(self.ts) - 1
h = self.__calc_h()
w = self.__calc_w(h)
matrix = self.__gen_matrix(h, w)
v = [0] + self.__gauss_jordan(matrix) + [0]
self.b = self.__calc_b(v)
self.a = self.__calc_a(v)
self.d = self.__calc_d()
self.c = self.__calc_c(v)
def interpolate(self, t):
""" Interpolation
:param float t: value for a interpolate target
:return float : computated y-value
"""
try:
i = self.__search_i(t)
return self.a[i] * (t - self.ts[i]) ** 3 \
+ self.b[i] * (t - self.ts[i]) ** 2 \
+ self.c[i] * (t - self.ts[i]) \
+ self.d[i]
except Exception as e:
raise
def __calc_h(self):
""" H calculation
:return list: h-values
"""
try:
return [self.ts[i + 1] - self.ts[i] for i in range(self.n)]
except Exception as e:
raise
def __calc_w(self, h):
""" W calculation
:param list h: h-values
:return list : w-values
"""
try:
return [
6 * ((self.ds[i + 1] - self.ds[i]) / h[i]
- (self.ds[i] - self.ds[i - 1]) / h[i - 1])
for i in range(1, self.n)
]
except Exception as e:
raise
def __gen_matrix(self, h, w):
""" Matrix generation
:param list h: h-values
:param list w: w-values
:return list mtx: generated 2-D matrix
"""
mtx = [[0 for _ in range(self.n)] for _ in range(self.n - 1)]
try:
for i in range(self.n - 1):
mtx[i][i] = 2 * (h[i] + h[i + 1])
mtx[i][-1] = w[i]
if i == 0:
continue
mtx[i - 1][i] = h[i]
mtx[i][i - 1] = h[i]
return mtx
except Exception as e:
raise
def __gauss_jordan(self, matrix):
""" Solving of simultaneous linear equations
with Gauss-Jordan's method
:param list mtx: list of 2-D matrix
:return list v: answers list of simultaneous linear equations
"""
v = []
n = self.n - 1
try:
for k in range(n):
p = matrix[k][k]
for j in range(k, n + 1):
matrix[k][j] /= p
for i in range(n):
if i == k:
continue
d = matrix[i][k]
for j in range(k, n + 1):
matrix[i][j] -= d * matrix[k][j]
for row in matrix:
v.append(row[-1])
return v
except Exception as e:
raise
def __calc_a(self, v):
""" A calculation
:param list v: v-values
:return list : a-values
"""
try:
return [
(v[i + 1] - v[i])
/ (6 * (self.ts[i + 1] - self.ts[i]))
for i in range(self.n)
]
except Exception as e:
raise
def __calc_b(self, v):
""" B calculation
:param list v: v-values
:return list : b-values
"""
try:
return [v[i] / 2.0 for i in range(self.n)]
except Exception as e:
raise
def __calc_c(self, v):
""" C calculation
:param list v: v-values
:return list : c-values
"""
try:
return [
(self.ds[i + 1] - self.ds[i]) / (self.ts[i + 1] - self.ts[i]) \
- (self.ts[i + 1] - self.ts[i]) * (2 * v[i] + v[i + 1]) / 6
for i in range(self.n)
]
except Exception as e:
raise
def __calc_d(self):
""" D calculation
:return list: c-values
"""
try:
return self.ds
except Exception as e:
raise
def __search_i(self, t):
""" Index searching
:param float t: t-value
:return int i: index
"""
i, j = 0, len(self.ts) - 1
try:
while i < j:
k = (i + j) // 2
if self.ts[k] < t:
i = k + 1
else:
j = k
if i > 0:
i -= 1
return i
except Exception as e:
raise
class Graph:
def __init__(self, xs_0, ys_0, zs_0, xs_1, ys_1, zs_1):
self.xs_0, self.ys_0, self.zs_0, self.xs_1, self.ys_1, self.zs_1 = xs_0, ys_0, zs_0, xs_1, ys_1, zs_1
def plot2d(self):
try:
plt.title("2-D Spline Interpolation in XY/XZ")
plt.scatter(
self.xs_1, self.ys_1, c = "g",
label = "interpolated points XY", marker = "+"
)
plt.scatter(
self.xs_0, self.ys_0, c = "r",
label = "given points XY"
)
plt.scatter(
self.xs_1, self.zs_1, c = "b",
label = "interpolated points XZ", marker = "+"
)
plt.scatter(
self.xs_0, self.zs_0, c = "k",
label = "given points XZ"
)
plt.xlabel("x")
plt.ylabel("y,z")
plt.legend(loc = 2)
plt.grid(color = "gray", linestyle = "--")
#plt.show()
#plt.savefig("spline_interpolation.png")
except Exception as e:
raise
def plot3d(self):
ax = plt.figure().add_subplot(projection='3d')
x = self.xs_1
y = self.ys_1
z = self.zs_1
ax.scatter(x, y, z, c='b', label='Interpolated points')
ax.scatter(X, Y, Z, c='r', label='Given points')
# Make legend, set axes limits and labels
ax.legend()
ax.set_xlim(min(X),max(X))
ax.set_ylim(min(Y),max(Y))
ax.set_zlim(min(Z),max(Z))
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
# Customize the view angle so it's easier to see that the scatter points lie
# on the plane y=0
ax.view_init(elev=20., azim=-35)
plt.show()
if __name__ == '__main__':
# (N + 1) points
T,X,Y,Z,B,C = [],[],[],[],[],[]
fileName = './points_input.txt'
import csv
with open(fileName, 'r') as f:
reader = csv.reader(f)
point_data = list(reader)
for line in point_data:
X.append(float(line[0]))
Y.append(float(line[1]))
Z.append(float(line[2]))
B.append(float(line[3]))
C.append(float(line[4]))
print('X:', X)
print('Y:', Y)
print('Z:', Z)
print('B:', B)
print('C:', C)
n=0
for x in X:
T.append(n+1.0)
n += 1
print('T: ', T)
#T = [1.0,2.0,3.0,4.0,5.0,6.0]
#X = [0.0, 2.0, 3.0, 5.0, 7.0, 8.0]
#Y = [0.8, 2.8, 3.2, 1.9, 4.5, 2.5]
#Z = [-0.5, 1.8, 2.2, 0.9, 3.5, -1.5]
S = 0.1 # Step for interpolation
S_1 = 1 / S # Inverse of S
xs_g, ys_g, zs_g, bs_g, cs_g = [], [], [], [], [] # List for graph
try:
# 3-D spline interpolation
si = SplineInterpolation(T, X)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
x= si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, x))
xs_g.append(x)
si = SplineInterpolation(T, Y)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
y = si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, y))
ys_g.append(y)
si = SplineInterpolation(T, Z)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
z = si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, z))
zs_g.append(z)
si = SplineInterpolation(T, B)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
b = si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, b))
bs_g.append(b)
si = SplineInterpolation(T, C)
for t in [t / S_1 for t in range(int(T[0] / S), int(T[-1] / S) + 1)]:
c = si.interpolate(t)
#print("{:8.4f}, {:8.4f}".format(t, c))
cs_g.append(c)
# Write output to file
file_out = 'output_file.txt'
print('Writing output to ',file_out)
n=0
output = open(file_out, 'w')
for x in xs_g:
string=("G1 X{:4.2f} Y{:4.2f} Z{:4.2f} B{:4.2f} C{:4.2f}\n".format(xs_g[n], ys_g[n], zs_g[n], bs_g[n], cs_g[n]))
output.write(string)
n += 1
# Closing file
output.close()
# Graph drawing
g = Graph(X, Y, Z, xs_g, ys_g, zs_g)
g.plot2d()
g.plot3d()
except Exception as e:
traceback.print_exc()
sys.exit(1)
Last edit: 11 Nov 2024 16:50 by jurod.
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- GCode and Part Programs
- O Codes (subroutines) and NGCGUI
- Remap 3D Cubic Spline Interpolation code by Python
Time to create page: 0.260 seconds