welche 24 Vsicherungen für die In und Outputs
- Mikron1207
- Offline
- New Member
-

Less
More
- Posts: 17
- Thank you received: 0
27 May 2021 11:23 #210437
by Mikron1207
Drehenkoder anschliessen was created by Mikron1207
Hallo Leute:Kann man einen Drehencoder so auf der 7i76e anschliessen?

Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21699
- Thank you received: 7416
27 May 2021 14:25 #210446
by tommylight
Replied by tommylight on topic Drehenkoder anschliessen
Ich denke ja ... aber wie das im hal geht weis ich nicht.
The following user(s) said Thank You: Mikron1207
Please Log in or Create an account to join the conversation.
- Mikron1207
- Offline
- New Member
-
Less
More
- Posts: 17
- Thank you received: 0
27 May 2021 16:49 #210450
by Mikron1207
Replied by Mikron1207 on topic Drehenkoder anschliessen
ja mit der halk ist jetzt ein problem
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21699
- Thank you received: 7416
27 May 2021 17:33 #210456
by tommylight
Replied by tommylight on topic Drehenkoder anschliessen
Es soll vie ein normaler encoder im hal sein, nur die nummer soll ander sein, encoder.00 stat encoder.0 oder encoder.1.
Hab kein 7i76 zur zeit, sorry.
Hab kein 7i76 zur zeit, sorry.
Please Log in or Create an account to join the conversation.
- RotarySMP
-

- Offline
- Platinum Member
-

Less
More
- Posts: 1627
- Thank you received: 595
27 May 2021 17:56 #210457
by RotarySMP
Replied by RotarySMP on topic Drehenkoder anschliessen
I have a normal jog encoder like that connected in my ENC.03 position on the Maho's 7i77. Works fine.Did you adjust the number of encoders in the loadrt HM2 line?
This is my HAL:
loadrt hm2_pci config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=300xxx"
#**********************
#PENDANT JOGGING
#*********************
#---MPG
#Connect encoder 3 to jogging
net pen.enc.count <= hm2_5i25.0.encoder.03.count
net pen.enc.count => axis.0.jog-counts
net pen.enc.count => axis.1.jog-counts
net pen.enc.count => axis.2.jog-counts
#provision for future C axis
#net pen.enc.count => axis.4.jog-counts
#one pulse per four quadrature pulses
setp hm2_5i25.0.encoder.03.counter-mode true
#---MPG AXIS SELECT
net axis.X.sel hm2_5i25.0.7i77.0.0.input-01 => axis.0.jog-enable
net axis.Y.sel hm2_5i25.0.7i77.0.0.input-02 => axis.1.jog-enable
net axis.Z.sel hm2_5i25.0.7i77.0.0.input-11 => axis.2.jog-enable
#Provision for future C axis
#net axis.C.sel hm2_5i25.0.7i77.0.0.input-12 => axis.4.jog-enable
#---MPG INCREMENTS
#connect selectable mpg jog increments
# Increment C
net jog-incr-a <= hm2_5i25.0.7i77.0.0.input-03
# Increment X1
net jog-incr-b <= hm2_5i25.0.7i77.0.0.input-15
# Increment X10
net jog-incr-c <= hm2_5i25.0.7i77.0.0.input-10
# Increment X100
net jog-incr-d <= hm2_5i25.0.7i77.0.0.input-13
net jog-incr-a => jogincr.sel0
net jog-incr-b => jogincr.sel1
net jog-incr-c => jogincr.sel2
net jog-incr-d => jogincr.sel3
net selected-jog-incr <= jogincr.out-f
setp jogincr.debounce-time 0.200000
setp jogincr.use-graycode False
setp jogincr.suppress-no-input False
setp jogincr.in00 0000000
setp jogincr.in01 0.100
setp jogincr.in02 0.0100
setp jogincr.in03 0.001
net selected-jog-incr => axis.0.jog-scale
net selected-jog-incr => axis.1.jog-scale
net selected-jog-incr => axis.2.jog-scale
This is my HAL:
loadrt hm2_pci config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=300xxx"
#**********************
#PENDANT JOGGING
#*********************
#---MPG
#Connect encoder 3 to jogging
net pen.enc.count <= hm2_5i25.0.encoder.03.count
net pen.enc.count => axis.0.jog-counts
net pen.enc.count => axis.1.jog-counts
net pen.enc.count => axis.2.jog-counts
#provision for future C axis
#net pen.enc.count => axis.4.jog-counts
#one pulse per four quadrature pulses
setp hm2_5i25.0.encoder.03.counter-mode true
#---MPG AXIS SELECT
net axis.X.sel hm2_5i25.0.7i77.0.0.input-01 => axis.0.jog-enable
net axis.Y.sel hm2_5i25.0.7i77.0.0.input-02 => axis.1.jog-enable
net axis.Z.sel hm2_5i25.0.7i77.0.0.input-11 => axis.2.jog-enable
#Provision for future C axis
#net axis.C.sel hm2_5i25.0.7i77.0.0.input-12 => axis.4.jog-enable
#---MPG INCREMENTS
#connect selectable mpg jog increments
# Increment C
net jog-incr-a <= hm2_5i25.0.7i77.0.0.input-03
# Increment X1
net jog-incr-b <= hm2_5i25.0.7i77.0.0.input-15
# Increment X10
net jog-incr-c <= hm2_5i25.0.7i77.0.0.input-10
# Increment X100
net jog-incr-d <= hm2_5i25.0.7i77.0.0.input-13
net jog-incr-a => jogincr.sel0
net jog-incr-b => jogincr.sel1
net jog-incr-c => jogincr.sel2
net jog-incr-d => jogincr.sel3
net selected-jog-incr <= jogincr.out-f
setp jogincr.debounce-time 0.200000
setp jogincr.use-graycode False
setp jogincr.suppress-no-input False
setp jogincr.in00 0000000
setp jogincr.in01 0.100
setp jogincr.in02 0.0100
setp jogincr.in03 0.001
net selected-jog-incr => axis.0.jog-scale
net selected-jog-incr => axis.1.jog-scale
net selected-jog-incr => axis.2.jog-scale
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4741
- Thank you received: 2125
27 May 2021 18:17 #210459
by Aciera
Replied by Aciera on topic Drehenkoder anschliessen
zeig doch mal deine HAL
Please Log in or Create an account to join the conversation.
- Mikron1207
- Offline
- New Member
-
Less
More
- Posts: 17
- Thank you received: 0
28 May 2021 18:03 #210546
by Mikron1207
Replied by Mikron1207 on topic Drehenkoder anschliessen
Ich weiss nicht ob man es sehen kann,aber ich habs gelöst
Please Log in or Create an account to join the conversation.
- Mikron1207
- Offline
- New Member
-
Less
More
- Posts: 17
- Thank you received: 0
29 May 2021 07:45 #210600
by Mikron1207
Replied by Mikron1207 on topic Drehenkoder anschliessen
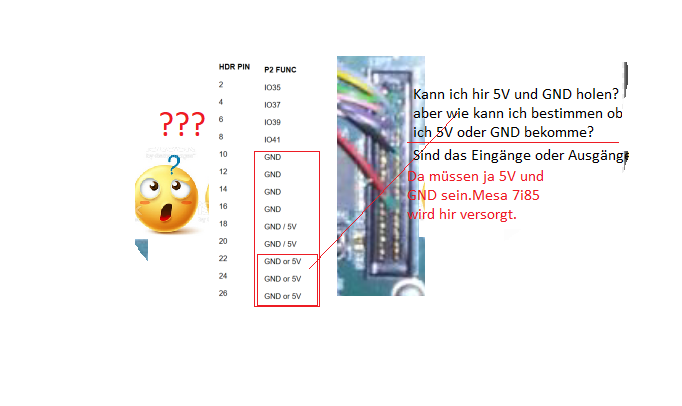
neue Frage:
Please Log in or Create an account to join the conversation.
- Mikron1207
- Offline
- New Member
-
Less
More
- Posts: 17
- Thank you received: 0
29 May 2021 07:53 #210601
by Mikron1207
Replied by Mikron1207 on topic Drehenkoder anschliessen
Darf ich mit einem Voltmeter darauf rumstechen um V oder GND zu finden?
Please Log in or Create an account to join the conversation.
- chris@cnc
- Offline
- Platinum Member
-
Less
More
- Posts: 529
- Thank you received: 140
29 May 2021 08:45 #210606
by chris@cnc
Replied by chris@cnc on topic Drehenkoder anschliessen
Mit diesen 25 pol Steckern habe sehr schlechte Erfahrung gemacht und meine 7i76e beschädigt.
Ich kann nur empfehlen das mit einem Flachbandkabel zu lösen und die 7i85 damit anzuschließen.
Schau mal hier gibt alles für unter 10€ wenn die keine Zange brauchst für zukünftige Basteleien...
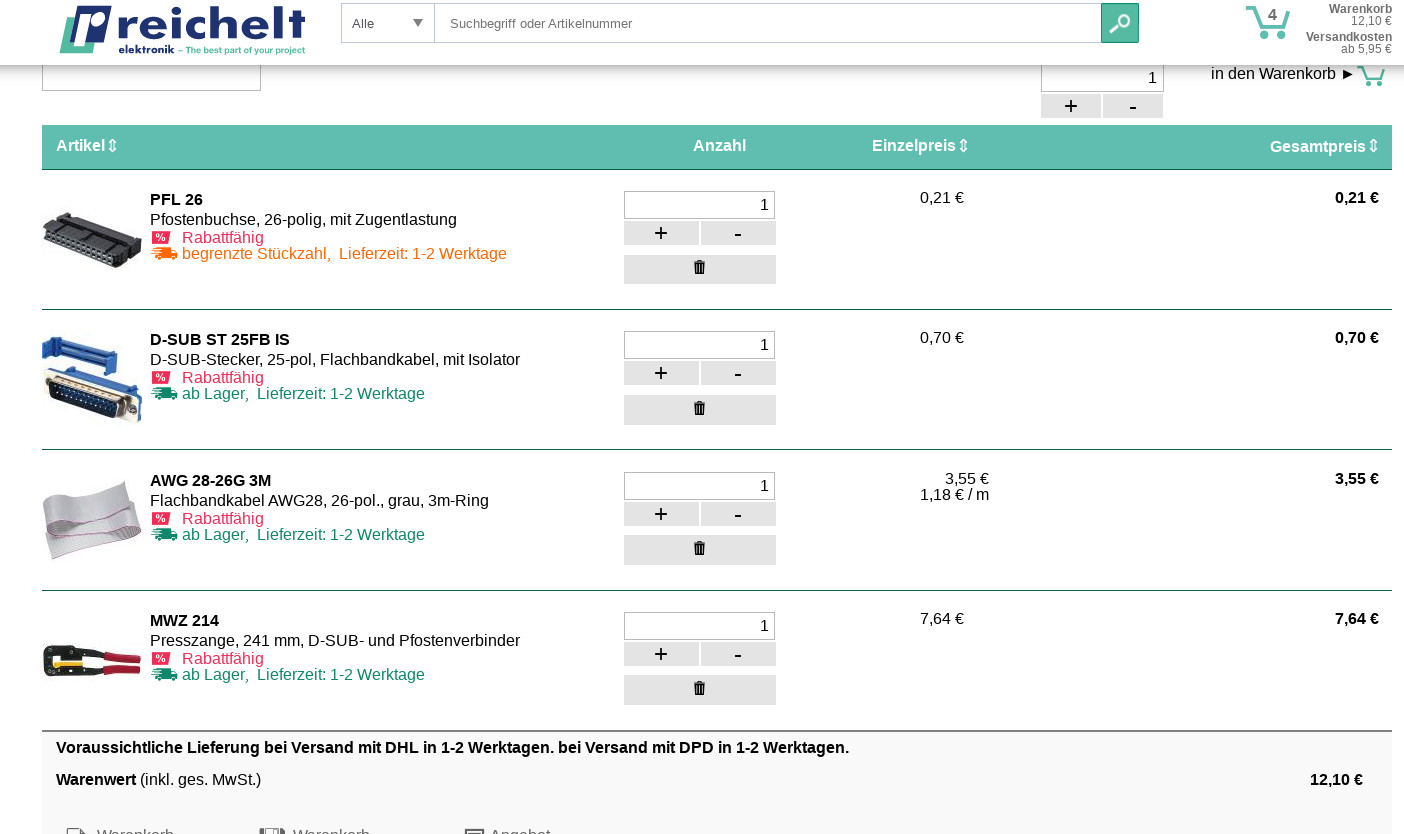
Ich kann nur empfehlen das mit einem Flachbandkabel zu lösen und die 7i85 damit anzuschließen.
Schau mal hier gibt alles für unter 10€ wenn die keine Zange brauchst für zukünftige Basteleien...
Attachments:
Please Log in or Create an account to join the conversation.
Moderators: Muecke
Time to create page: 0.285 seconds