Fehlermeldung
- Yoshyluebeck
- Offline
- Junior Member
-

Less
More
- Posts: 31
- Thank you received: 4
07 Apr 2023 06:24 #268489
by Yoshyluebeck
Fehlermeldung was created by Yoshyluebeck
Moin Moin,
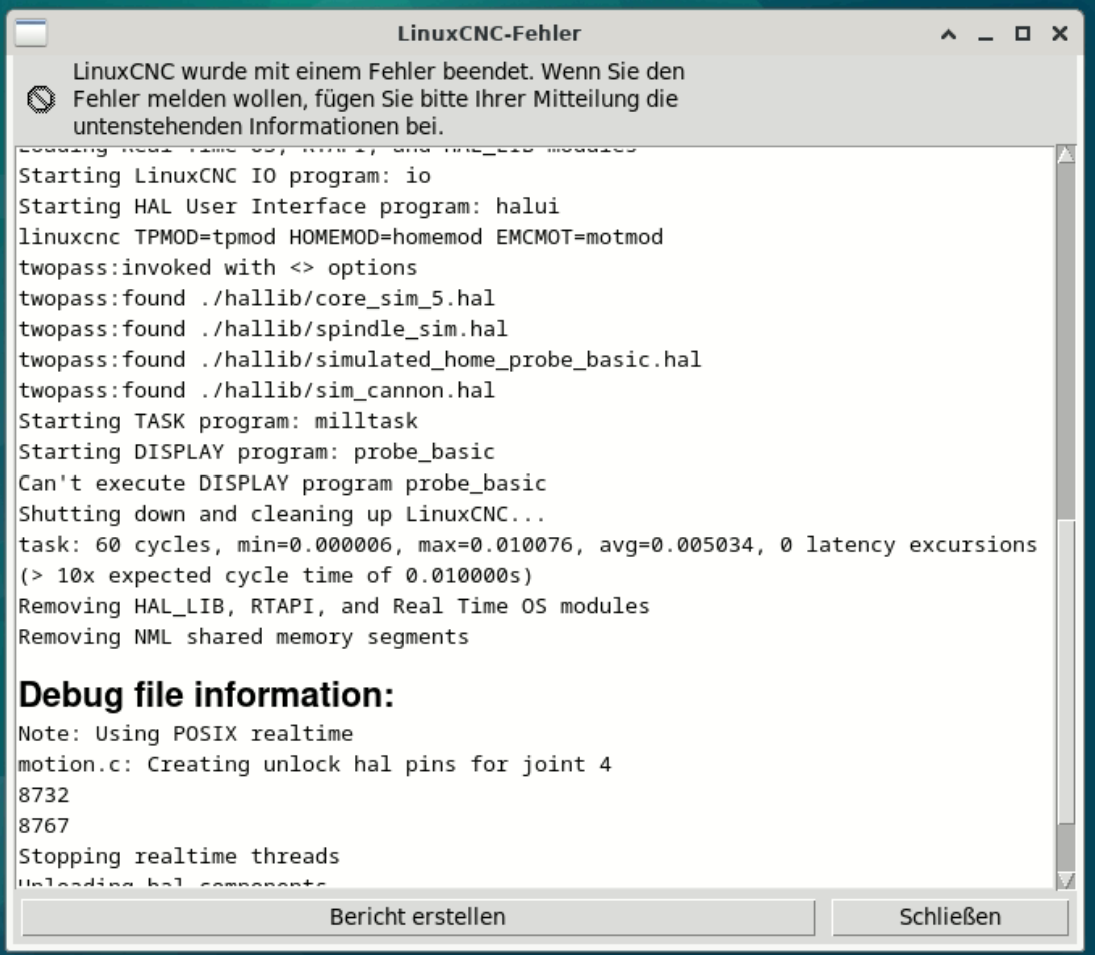
ich bekomme beim starten von ProbeBasic folgende Fehlermeldung
Starting DISPLAY program: probe_basic
.Starting DISPLAY program: probe_basicCan't execute DISPLAY program probe_basic.
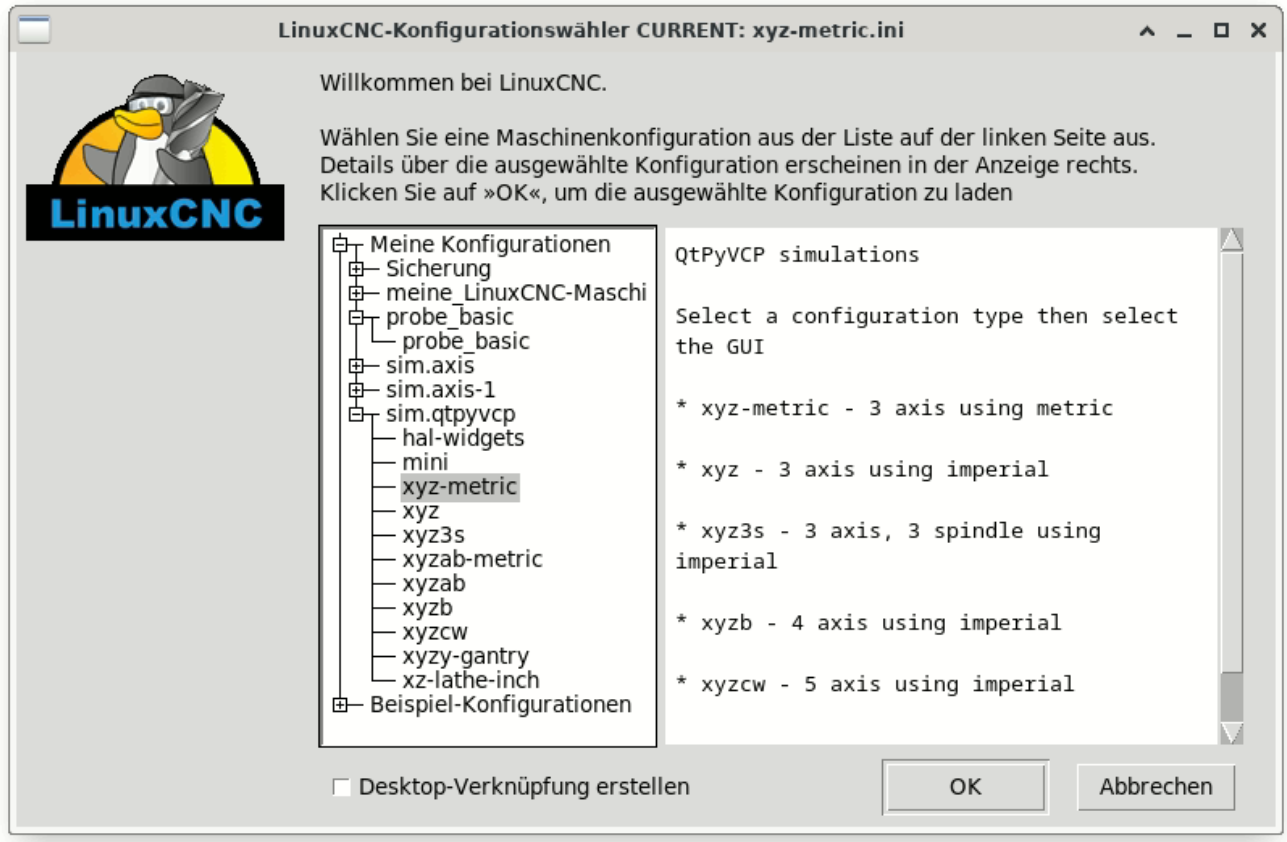
Diese Fehlermeldung kommt aber auch wenn ich eine Simulation im im Linux Konfigurationwähler starte, zum Beispiel qtqyvcp siehe Bild.
Im Einsatz habe Linux Debia 12 mit LinuxCNC2.9
ich bekomme beim starten von ProbeBasic folgende Fehlermeldung
Starting DISPLAY program: probe_basic
.Starting DISPLAY program: probe_basicCan't execute DISPLAY program probe_basic.
Diese Fehlermeldung kommt aber auch wenn ich eine Simulation im im Linux Konfigurationwähler starte, zum Beispiel qtqyvcp siehe Bild.
Im Einsatz habe Linux Debia 12 mit LinuxCNC2.9
Attachments:
Please Log in or Create an account to join the conversation.
- spicer
-

- Offline
- Platinum Member
-

Less
More
- Posts: 422
- Thank you received: 126
07 Apr 2023 07:03 #268492
by spicer
Replied by spicer on topic Fehlermeldung
Warum hast Du denn die instabile, noch nicht releaste Debian 12 (Bookworm) Version installiert?
Please Log in or Create an account to join the conversation.
- Yoshyluebeck
- Offline
- Junior Member
-
Less
More
- Posts: 31
- Thank you received: 4
07 Apr 2023 07:41 - 07 Apr 2023 07:47 #268493
by Yoshyluebeck
Replied by Yoshyluebeck on topic Fehlermeldung
Das wurde mir so von Experten aus dem Discort empfohlen!
Ich bin noch relativ am Anfang mit meinem Linux CNC Wissen und probiere es einfach aus was mir empfohlen wird.
Mein Ziel/Wunsch ist LinuxCNC mit ProbeBasic.
docs.google.com/document/d/1jeV_4VKzVmOI...m1x7oiw8VcLFdiY/edit
Aber hat Debian 12 (Bookworm) denn möglicherweise etwas mit der Fehlermeldung zu tun?
Ich bin noch relativ am Anfang mit meinem Linux CNC Wissen und probiere es einfach aus was mir empfohlen wird.
Mein Ziel/Wunsch ist LinuxCNC mit ProbeBasic.
docs.google.com/document/d/1jeV_4VKzVmOI...m1x7oiw8VcLFdiY/edit
Aber hat Debian 12 (Bookworm) denn möglicherweise etwas mit der Fehlermeldung zu tun?
Last edit: 07 Apr 2023 07:47 by Yoshyluebeck.
Please Log in or Create an account to join the conversation.
- Yoshyluebeck
- Offline
- Junior Member
-
Less
More
- Posts: 31
- Thank you received: 4
07 Apr 2023 07:43 #268494
by Yoshyluebeck
Replied by Yoshyluebeck on topic Fehlermeldung
Mit einer Veröffentlichung von Debian 12 »Bookworm« ist im Sommer 2023 zu rechnen.
Das ist doch in ein paar Wochen. Meinst das die Version noch Instabil ist?
Das ist doch in ein paar Wochen. Meinst das die Version noch Instabil ist?
Please Log in or Create an account to join the conversation.
- HansU
-

- Offline
- Platinum Member
-
Less
More
- Posts: 723
- Thank you received: 217
07 Apr 2023 07:52 #268495
by HansU
Replied by HansU on topic Fehlermeldung
Wo hast du denn deine sim.qtpyvcp Konfiguration her?
Please Log in or Create an account to join the conversation.
- Yoshyluebeck
- Offline
- Junior Member
-
Less
More
- Posts: 31
- Thank you received: 4
07 Apr 2023 08:32 #268497
by Yoshyluebeck
Replied by Yoshyluebeck on topic Fehlermeldung
siehe Foto
diese Ordner sind im Ordner LinucCnc vorhanden
sim.qtpyvcp
[EMC]
VERSION = 1.1
MACHINE = QtPyVCP - XYZ Metric Sim
DEBUG = 0
[DISPLAY]
DISPLAY = qtpyvcp
# QtPyVCP Specific Options
CONFIRM_EXIT = False
;FULLSCREEN = False
;MAXIMIZE = False
;POSITION = 0x0
# About File Paths:
; File paths can be relative to the config dir:
; LOG_FILE = qtpyvcp.log
; Or relative to $HOME: (May not be compatible with other GUIs!)
; LOG_FILE = ~/qtpyvcp.log
; Or at an absolute location:
; LOG_FILE = /home/<USER>/qtpyvcp.log
; Enviroment vars are also expanded:
; LOG_FILE = $CONFIG_DIR/qtpyvcp.log
LOG_FILE = sim.log
LOG_LEVEL = WARN
PREFERENCE_FILE = sim.pref
CONFIG_FILE = custom_config.yml
# Standard LinuxCNC Display Settings
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 50.0000
MAX_LINEAR_VELOCITY = 125.0000
MIN_LINEAR_VELOCITY = 0.5000
DEFAULT_ANGULAR_VELOCITY = 12.0000
MAX_ANGULAR_VELOCITY = 180.0000
MIN_ANGULAR_VELOCITY = 1.6667
DEFAULT_SPINDLE_SPEED = 300
MAX_SPINDLE_OVERRIDE = 2.0000
MIN_SPINDLE_OVERRIDE = 0.5000
MAX_FEED_OVERRIDE = 2.0000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 1
PROGRAM_PREFIX = ~/linuxcnc/nc_files
INCREMENTS = JOG 5mm 1mm .1mm .01mm
GEOMETRY = xyz
[VTK]
# VTK_Widget Options
MACHINE_BOUNDRY = True
MACHINE_TICKS = True
MACHINE_LABELS = False
PROGRAM_BOUNDRY = True
PROGRAM_TICKS = True
PROGRAM_LABELS = False
GRID_LINES = True
[FILTER]
PROGRAM_EXTENSION = .nc,.txt,.tap ; .ngc is always accepted
[RS274NGC]
PARAMETER_FILE = sim.var
SUBROUTINE_PATH = ../../nc_files/qtpyvcp/subroutines
RS274NGC_STARTUP_CODE = F10 S300 G64 P0.001
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
COMM_WAIT = 0.010
BASE_PERIOD = 100000
SERVO_PERIOD = 1000000
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[HAL]
HALFILE = hallib/core_sim_3.hal
HALFILE = hallib/spindle_sim.hal
HALFILE = hallib/simulated_home.hal
HALUI = halui
[HALUI]
[TRAJ]
AXES = 3
COORDINATES = X Y Z
MAX_ANGULAR_VELOCITY = 360.00
DEFAULT_ANGULAR_VELOCITY = 36.00
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
CYCLE_TIME = 0.010
DEFAULT_LINEAR_VELOCITY = 10.0000
MAX_LINEAR_VELOCITY = 125.0000
SPINDLES = 1
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
[KINS]
KINEMATICS = trivkins coordinates=XYZ
JOINTS = 3
#==================
# X Axis
#==================
[AXIS_X]
MIN_LIMIT = -0.0001
MAX_LIMIT = 300.000
MAX_VELOCITY = 125.0
MAX_ACCELERATION = 500.0
[JOINT_0]
TYPE = LINEAR
HOME = 0.000
MAX_VELOCITY = 125.0000
MAX_ACCELERATION = 500.000
BACKLASH = 0.0003
INPUT_SCALE = 4000
OUTPUT_SCALE = 1.000
MIN_LIMIT = -0.0001
MAX_LIMIT = 300.0
FERROR = 0.050
MIN_FERROR = 0.010
HOME_OFFSET = 0.0
HOME_SEARCH_VEL = 50.0
HOME_LATCH_VEL = 2.5
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = NO
HOME_SEQUENCE = 1
HOME_IS_SHARED = 1
#==================
# Y Axis
#==================
[AXIS_Y]
MIN_LIMIT = -0.0001
MAX_LIMIT = 250.000
MAX_VELOCITY = 125.0
MAX_ACCELERATION = 500.0
[JOINT_1]
TYPE = LINEAR
HOME = 0.000
MAX_VELOCITY = 125.0000
MAX_ACCELERATION = 500.000
BACKLASH = 0.0003
INPUT_SCALE = 4000
OUTPUT_SCALE = 1.000
MIN_LIMIT = -0.0001
MAX_LIMIT = 250.0
FERROR = 0.050
MIN_FERROR = 0.010
HOME_OFFSET = 0.0
HOME_SEARCH_VEL = 50.0
HOME_LATCH_VEL = 2.5
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = NO
HOME_SEQUENCE = 1
HOME_IS_SHARED = 1
#==================
# Z Axis
#==================
[AXIS_Z]
MIN_LIMIT = -100.0000
MAX_LIMIT = 0.0001
MAX_VELOCITY = 100.0
MAX_ACCELERATION = 500.0
[JOINT_2]
TYPE = LINEAR
HOME = 0.000
MAX_VELOCITY = 100.0
MAX_ACCELERATION = 500.0
BACKLASH = 0.0003
INPUT_SCALE = 4000
OUTPUT_SCALE = 1.000
MIN_LIMIT = -100.0000
MAX_LIMIT = 0.0001
FERROR = 0.050
MIN_FERROR = 0.010
HOME_OFFSET = 25.0
HOME_SEARCH_VEL = 50.0
HOME_LATCH_VEL = 2.5
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = NO
HOME_SEQUENCE = 0
HOME_IS_SHARED = 1
#==================
# Spindle
#==================
[SPINDLE_9]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 2000
diese Ordner sind im Ordner LinucCnc vorhanden
sim.qtpyvcp
[EMC]
VERSION = 1.1
MACHINE = QtPyVCP - XYZ Metric Sim
DEBUG = 0
[DISPLAY]
DISPLAY = qtpyvcp
# QtPyVCP Specific Options
CONFIRM_EXIT = False
;FULLSCREEN = False
;MAXIMIZE = False
;POSITION = 0x0
# About File Paths:
; File paths can be relative to the config dir:
; LOG_FILE = qtpyvcp.log
; Or relative to $HOME: (May not be compatible with other GUIs!)
; LOG_FILE = ~/qtpyvcp.log
; Or at an absolute location:
; LOG_FILE = /home/<USER>/qtpyvcp.log
; Enviroment vars are also expanded:
; LOG_FILE = $CONFIG_DIR/qtpyvcp.log
LOG_FILE = sim.log
LOG_LEVEL = WARN
PREFERENCE_FILE = sim.pref
CONFIG_FILE = custom_config.yml
# Standard LinuxCNC Display Settings
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 50.0000
MAX_LINEAR_VELOCITY = 125.0000
MIN_LINEAR_VELOCITY = 0.5000
DEFAULT_ANGULAR_VELOCITY = 12.0000
MAX_ANGULAR_VELOCITY = 180.0000
MIN_ANGULAR_VELOCITY = 1.6667
DEFAULT_SPINDLE_SPEED = 300
MAX_SPINDLE_OVERRIDE = 2.0000
MIN_SPINDLE_OVERRIDE = 0.5000
MAX_FEED_OVERRIDE = 2.0000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 1
PROGRAM_PREFIX = ~/linuxcnc/nc_files
INCREMENTS = JOG 5mm 1mm .1mm .01mm
GEOMETRY = xyz
[VTK]
# VTK_Widget Options
MACHINE_BOUNDRY = True
MACHINE_TICKS = True
MACHINE_LABELS = False
PROGRAM_BOUNDRY = True
PROGRAM_TICKS = True
PROGRAM_LABELS = False
GRID_LINES = True
[FILTER]
PROGRAM_EXTENSION = .nc,.txt,.tap ; .ngc is always accepted
[RS274NGC]
PARAMETER_FILE = sim.var
SUBROUTINE_PATH = ../../nc_files/qtpyvcp/subroutines
RS274NGC_STARTUP_CODE = F10 S300 G64 P0.001
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
COMM_WAIT = 0.010
BASE_PERIOD = 100000
SERVO_PERIOD = 1000000
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[HAL]
HALFILE = hallib/core_sim_3.hal
HALFILE = hallib/spindle_sim.hal
HALFILE = hallib/simulated_home.hal
HALUI = halui
[HALUI]
[TRAJ]
AXES = 3
COORDINATES = X Y Z
MAX_ANGULAR_VELOCITY = 360.00
DEFAULT_ANGULAR_VELOCITY = 36.00
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
CYCLE_TIME = 0.010
DEFAULT_LINEAR_VELOCITY = 10.0000
MAX_LINEAR_VELOCITY = 125.0000
SPINDLES = 1
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
[KINS]
KINEMATICS = trivkins coordinates=XYZ
JOINTS = 3
#==================
# X Axis
#==================
[AXIS_X]
MIN_LIMIT = -0.0001
MAX_LIMIT = 300.000
MAX_VELOCITY = 125.0
MAX_ACCELERATION = 500.0
[JOINT_0]
TYPE = LINEAR
HOME = 0.000
MAX_VELOCITY = 125.0000
MAX_ACCELERATION = 500.000
BACKLASH = 0.0003
INPUT_SCALE = 4000
OUTPUT_SCALE = 1.000
MIN_LIMIT = -0.0001
MAX_LIMIT = 300.0
FERROR = 0.050
MIN_FERROR = 0.010
HOME_OFFSET = 0.0
HOME_SEARCH_VEL = 50.0
HOME_LATCH_VEL = 2.5
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = NO
HOME_SEQUENCE = 1
HOME_IS_SHARED = 1
#==================
# Y Axis
#==================
[AXIS_Y]
MIN_LIMIT = -0.0001
MAX_LIMIT = 250.000
MAX_VELOCITY = 125.0
MAX_ACCELERATION = 500.0
[JOINT_1]
TYPE = LINEAR
HOME = 0.000
MAX_VELOCITY = 125.0000
MAX_ACCELERATION = 500.000
BACKLASH = 0.0003
INPUT_SCALE = 4000
OUTPUT_SCALE = 1.000
MIN_LIMIT = -0.0001
MAX_LIMIT = 250.0
FERROR = 0.050
MIN_FERROR = 0.010
HOME_OFFSET = 0.0
HOME_SEARCH_VEL = 50.0
HOME_LATCH_VEL = 2.5
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = NO
HOME_SEQUENCE = 1
HOME_IS_SHARED = 1
#==================
# Z Axis
#==================
[AXIS_Z]
MIN_LIMIT = -100.0000
MAX_LIMIT = 0.0001
MAX_VELOCITY = 100.0
MAX_ACCELERATION = 500.0
[JOINT_2]
TYPE = LINEAR
HOME = 0.000
MAX_VELOCITY = 100.0
MAX_ACCELERATION = 500.0
BACKLASH = 0.0003
INPUT_SCALE = 4000
OUTPUT_SCALE = 1.000
MIN_LIMIT = -100.0000
MAX_LIMIT = 0.0001
FERROR = 0.050
MIN_FERROR = 0.010
HOME_OFFSET = 25.0
HOME_SEARCH_VEL = 50.0
HOME_LATCH_VEL = 2.5
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = NO
HOME_SEQUENCE = 0
HOME_IS_SHARED = 1
#==================
# Spindle
#==================
[SPINDLE_9]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 2000
Please Log in or Create an account to join the conversation.
- HansU
-
- Offline
- Platinum Member
-
Less
More
- Posts: 723
- Thank you received: 217
07 Apr 2023 09:16 #268501
by HansU
Replied by HansU on topic Fehlermeldung
Soweit ich sehen kann ist es bei LinuxCNC nicht mit dabei.
Sicher, dass du es nicht von www.qtpyvcp.com/install/index.html installiert hast?
Sicher, dass du es nicht von www.qtpyvcp.com/install/index.html installiert hast?
Please Log in or Create an account to join the conversation.
- Yoshyluebeck
- Offline
- Junior Member
-
Less
More
- Posts: 31
- Thank you received: 4
07 Apr 2023 12:33 #268508
by Yoshyluebeck
Replied by Yoshyluebeck on topic Fehlermeldung
Aber die eigentliche Eingangsfrage war diese Fehlermeldung , wie kann ich den Fehler angehenwo hackt es!
Starting DISPLAY program: probe_basic
.Starting DISPLAY program: probe_basicCan't execute DISPLAY program probe_basic.
QtPyVCP als Simulation hatte ich ausprobiert um zu sehen was passiert. Ist QtPyVCP wichtig für die Verwendung von probe_basic?
Starting DISPLAY program: probe_basic
.Starting DISPLAY program: probe_basicCan't execute DISPLAY program probe_basic.
QtPyVCP als Simulation hatte ich ausprobiert um zu sehen was passiert. Ist QtPyVCP wichtig für die Verwendung von probe_basic?
Please Log in or Create an account to join the conversation.
- HansU
-
- Offline
- Platinum Member
-
Less
More
- Posts: 723
- Thank you received: 217
07 Apr 2023 13:48 #268515
by HansU
Replied by HansU on topic Fehlermeldung
Ich kenn mich mit probe_basic nicht aus, aber du könntest deine komplette Config posten, dann könnte ich mal schauen. Oder du wartest bis sich jemand findet, der mit probe_basic arbeitet ")
Please Log in or Create an account to join the conversation.
Moderators: Muecke
Time to create page: 0.176 seconds