- International LinuxCNC Users
- Deutsch
- 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
- Muecke
-
 Topic Author
Topic Author
- Offline
- Moderator
-

Less
More
- Posts: 886
- Thank you received: 93
28 Feb 2026 17:32 - 28 Feb 2026 17:33 #343661
by Muecke
400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht was created by Muecke
Hallo zusammen,
ich möchte einen 400V Synchron-Servomotor in LinuxCNC über EtherCAT (CiA402) einbinden.
Ursprünglich war der Motor mit einem proprietären Encoder geplant, das habe ich jedoch verworfen.
Ich gehe nun davon aus, dass ein Standard-Drehgeber (z. B. Inkremental TTL/HTL oder BiSS) verbaut ist.
Der Drive muss also:
Motordaten:
Meine Frage:
Habt ihr eine Empfehlung für einen bezahlbaren EtherCAT-Drive mit CiA402, der:
Falls ich etwas übersehe:
Reicht es korrekt betrachtet aus, wenn der Drive:
Ich freue mich über konkrete Modell-Empfehlungen oder Erfahrungswerte mit LinuxCNC.
Viele Grüße
Mücke
ich möchte einen 400V Synchron-Servomotor in LinuxCNC über EtherCAT (CiA402) einbinden.
Ursprünglich war der Motor mit einem proprietären Encoder geplant, das habe ich jedoch verworfen.
Ich gehe nun davon aus, dass ein Standard-Drehgeber (z. B. Inkremental TTL/HTL oder BiSS) verbaut ist.
Der Drive muss also:
- den Motor regeln (Drehmoment / Drehzahl / Position)
- den Drehgeber auswerten
- EtherCAT mit CiA402 unterstützen (CSP bevorzugt)
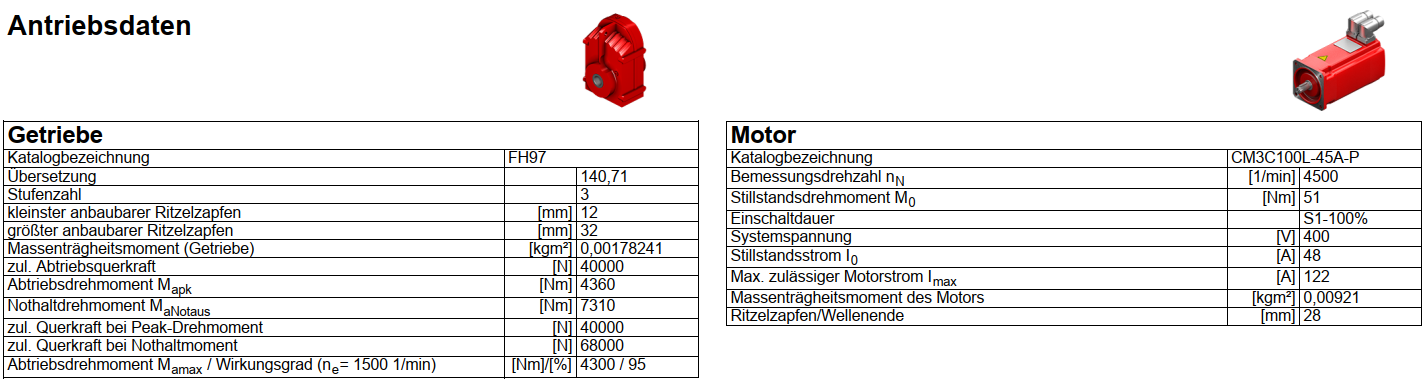
Motordaten:
- Typ: 400V Synchron-Servo
- Nennspannung: 400 V
- Stillstandsdrehmoment: 51 Nm
- Spitzenmoment: 120 Nm
- Nenndrehzahl: 4500 rpm
- Max. Strom: 122 A
- Keine Haltebremse
- Geber: Standard (kein proprietäres Protokoll)
Meine Frage:
Habt ihr eine Empfehlung für einen bezahlbaren EtherCAT-Drive mit CiA402, der:
- 400V Klasse
- ca. 50 Nm Dauer / 120 Nm Peak
- Standardgeber (TTL oder BiSS)
- sauber mit LinuxCNC (IgH + cia402.comp) läuft?
Falls ich etwas übersehe:
Reicht es korrekt betrachtet aus, wenn der Drive:
- den Motorstrom regelt
- den Encoder auswertet
- CiA402 unterstützt
Ich freue mich über konkrete Modell-Empfehlungen oder Erfahrungswerte mit LinuxCNC.
Viele Grüße
Mücke
Last edit: 28 Feb 2026 17:33 by Muecke.
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 12005
- Thank you received: 4086
01 Mar 2026 03:37 #343677
by rodw
Replied by rodw on topic 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
Affordable and 4500 rpm may not go together! Anything over 3000 rpm is hard to find and not affordable by many standards!
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
- Muecke
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 886
- Thank you received: 93
01 Mar 2026 10:41 - 01 Mar 2026 10:45 #343685
by Muecke
[EN]
The 4500 rpm is the upper limit from the sizing; in real operation I expect something more in the range of ~2240–3080 rpm.
Do you (or anyone else) have recommendations for 400V EtherCAT/CiA402 drives that are still reasonably affordable in that range?
I’d also be happy to look at solutions up to 3000 rpm if that significantly broadens the available options.
[DE]
Die 4500 rpm sind bei mir tatsächlich die Obergrenze aus der Auslegung, ich erwarte im Betrieb eher ~2240–3080 rpm.
Hast Du (oder jemand anders) Empfehlungen für EtherCAT/CiA402-Drives in der 400V-Klasse, die in diesem Bereich noch „bezahlbar“ sind?
Ich würde mir auch Lösungen bis 3000 rpm anschauen, falls das die Auswahl deutlich vergrößert.
Replied by Muecke on topic 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
Affordable and 4500 rpm may not go together! Anything over 3000 rpm is hard to find and not affordable by many standards!
[EN]
The 4500 rpm is the upper limit from the sizing; in real operation I expect something more in the range of ~2240–3080 rpm.
Do you (or anyone else) have recommendations for 400V EtherCAT/CiA402 drives that are still reasonably affordable in that range?
I’d also be happy to look at solutions up to 3000 rpm if that significantly broadens the available options.
[DE]
Die 4500 rpm sind bei mir tatsächlich die Obergrenze aus der Auslegung, ich erwarte im Betrieb eher ~2240–3080 rpm.
Hast Du (oder jemand anders) Empfehlungen für EtherCAT/CiA402-Drives in der 400V-Klasse, die in diesem Bereich noch „bezahlbar“ sind?
Ich würde mir auch Lösungen bis 3000 rpm anschauen, falls das die Auswahl deutlich vergrößert.
Last edit: 01 Mar 2026 10:45 by Muecke.
Please Log in or Create an account to join the conversation.
- andrax
-

- Offline
- Elite Member
-

Less
More
- Posts: 312
- Thank you received: 82
01 Mar 2026 20:14 #343697
by andrax
Replied by andrax on topic 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
So wie ich das lese, willst du den Motor als Spindel einsetzen....
Wenn ich all deine Wünsche berücksichtige, landest du bei Kollmorgen. Das sprengt aber dein Budget
Wenn ich all deine Wünsche berücksichtige, landest du bei Kollmorgen. Das sprengt aber dein Budget
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
- Muecke
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 886
- Thank you received: 93
02 Mar 2026 06:08 #343712
by Muecke
Replied by Muecke on topic 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
Öhm, nein, als Spindel definitiv nicht.
Der Motor ist für meine Y-Achse, jedoch befindet sich eine recht hohe Masse darauf, weshalb ein hohes Drehmoment benötigt wird. Der Motor selbst kann 51 Nm, das Getriebe, das danach kommt, ist ein 140:1. Da die hohe Masse jedoch mm-genau positioniert werden soll, in positiver wie auch negativer Richtung, reicht es nicht, den Motor nur ein- und auszuschalten.
Der Motor ist für meine Y-Achse, jedoch befindet sich eine recht hohe Masse darauf, weshalb ein hohes Drehmoment benötigt wird. Der Motor selbst kann 51 Nm, das Getriebe, das danach kommt, ist ein 140:1. Da die hohe Masse jedoch mm-genau positioniert werden soll, in positiver wie auch negativer Richtung, reicht es nicht, den Motor nur ein- und auszuschalten.
Please Log in or Create an account to join the conversation.
- roland
-

- Offline
- Premium Member
-

Less
More
- Posts: 140
- Thank you received: 64
02 Mar 2026 11:35 #343724
by roland
Replied by roland on topic 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
Der Motor hat ja über 20 kW...
Hinter dem 140:1 Getriebe hätte der ein Haltemoment von 7000 Nm. Krass
Hinter dem 140:1 Getriebe hätte der ein Haltemoment von 7000 Nm. Krass
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
- andrax
-
- Offline
- Elite Member
-
Less
More
- Posts: 312
- Thank you received: 82
02 Mar 2026 17:57 #343735
by andrax
Replied by andrax on topic 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
Sach mal Mueke,
willst du ein komplettes Haus um die Achse drehen?

willst du ein komplettes Haus um die Achse drehen?
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
- sivaraj
- Offline
- Senior Member
-

Less
More
- Posts: 50
- Thank you received: 25
03 Mar 2026 02:48 #343764
by sivaraj
Replied by sivaraj on topic 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
Based on the data provided, if the motor is a permanent magnet type, it is likely in the range of approximately 7.5 kW (or max 11 kW)
From the peak data shared, I estimate that the motor’s rated current at stall torque would be around 50A. Accordingly, you may need to consider a universal drive rated at approximately 50A.. This will be around 22kw
Can you verify whether the motor nameplate specifies a rated voltage 400V, or is this value being assumed based on the drive input power?
From the peak data shared, I estimate that the motor’s rated current at stall torque would be around 50A. Accordingly, you may need to consider a universal drive rated at approximately 50A.. This will be around 22kw
Can you verify whether the motor nameplate specifies a rated voltage 400V, or is this value being assumed based on the drive input power?
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
- Muecke
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 886
- Thank you received: 93
09 Mar 2026 16:10 - 09 Mar 2026 16:11 #344058
by Muecke
Replied by Muecke on topic 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
Ganz so schlimm ist es nicht ?
Ein Haus drehe ich damit nicht – aber es geht um eine Achse, auf der im Worst Case bis zu 11,5 t Achslast stehen können.
Wenn sauber verteilt wären es 5,75 t pro Rad, aber da die Lastverteilung nicht immer ideal ist, rechne ich konservativ mit ~7 t.
Der Motor selbst hat 51 Nm Nennmoment, dahinter sitzt ein 140:1 Getriebe.
Rein rechnerisch komme ich damit natürlich auf sehr hohe Haltemomente – aber das bedeutet nicht, dass ich permanent 7000 Nm fahre.
Ich habe bewusst eher „zu groß“ dimensioniert, weil:
* hohe Massenträgheit wirkt auf Motor und Getriebe
* Lastverteilung nicht konstant ist
* reproduzierbare Positionierung im mm-Bereich erforderlich ist
* Bewegung in beide Richtungen notwendig ist
* Sicherheitsreserve einkalkuliert wurde
Sollte sich im Prototyp später zeigen, dass deutlich Reserve vorhanden ist (über reale Drehmomentmessung), würde ich das System in einer späteren Ausbaustufe kleiner dimensionieren.
Was mich aktuell technisch mehr beschäftigt, ist der Drive selbst.
Wenn ich nach Servodrives schaue, finde ich fast nie eine explizite Drehzahlbegrenzung im Datenblatt.
4500 rpm sind bei mir die rechnerische Obergrenze, real erwarte ich eher 2200–3000 rpm.
Woran erkenne ich eigentlich, ob ein Drive diese Drehzahl sauber kann?
Ist das primär begrenzt durch:
* Zwischenkreisspannung / Back-EMF des Motors?
* maximale elektrische Frequenz des Drives?
* Encoder-Auswertefrequenz?
* interne Regelzykluszeit?
Oder ist bei der 400-V-Klasse eher Strom bzw. Leistung der limitierende Faktor und nicht die Drehzahl?
Falls jemand hier bereits 400-V-EtherCAT-Drives (CiA402) im Bereich 15–25 kW mit LinuxCNC (IgH + cia402.comp) im Einsatz hat, wären konkrete Erfahrungswerte sehr hilfreich.
Und ganz unabhängig davon:
Wer Interesse an dem Projekt hat – ich sitze im Großraum Stuttgart (nördlich).
Ihr seid herzlich eingeladen, auf ein Bier oder einen Tee vorbeizukommen, Euch meinen Mini-Prototypen anzuschauen und mit mir über mögliche Umsetzungen, Verbesserungen oder auch meine Denkfehler zu diskutieren.
Ich freue mich über jeden, der Lust und Zeit hat, sich das live anzusehen.
Viele Grüße
Mücke
Ein Haus drehe ich damit nicht – aber es geht um eine Achse, auf der im Worst Case bis zu 11,5 t Achslast stehen können.
Wenn sauber verteilt wären es 5,75 t pro Rad, aber da die Lastverteilung nicht immer ideal ist, rechne ich konservativ mit ~7 t.
Der Motor selbst hat 51 Nm Nennmoment, dahinter sitzt ein 140:1 Getriebe.
Rein rechnerisch komme ich damit natürlich auf sehr hohe Haltemomente – aber das bedeutet nicht, dass ich permanent 7000 Nm fahre.
Ich habe bewusst eher „zu groß“ dimensioniert, weil:
* hohe Massenträgheit wirkt auf Motor und Getriebe
* Lastverteilung nicht konstant ist
* reproduzierbare Positionierung im mm-Bereich erforderlich ist
* Bewegung in beide Richtungen notwendig ist
* Sicherheitsreserve einkalkuliert wurde
Sollte sich im Prototyp später zeigen, dass deutlich Reserve vorhanden ist (über reale Drehmomentmessung), würde ich das System in einer späteren Ausbaustufe kleiner dimensionieren.
Was mich aktuell technisch mehr beschäftigt, ist der Drive selbst.
Wenn ich nach Servodrives schaue, finde ich fast nie eine explizite Drehzahlbegrenzung im Datenblatt.
4500 rpm sind bei mir die rechnerische Obergrenze, real erwarte ich eher 2200–3000 rpm.
Woran erkenne ich eigentlich, ob ein Drive diese Drehzahl sauber kann?
Ist das primär begrenzt durch:
* Zwischenkreisspannung / Back-EMF des Motors?
* maximale elektrische Frequenz des Drives?
* Encoder-Auswertefrequenz?
* interne Regelzykluszeit?
Oder ist bei der 400-V-Klasse eher Strom bzw. Leistung der limitierende Faktor und nicht die Drehzahl?
Falls jemand hier bereits 400-V-EtherCAT-Drives (CiA402) im Bereich 15–25 kW mit LinuxCNC (IgH + cia402.comp) im Einsatz hat, wären konkrete Erfahrungswerte sehr hilfreich.
Und ganz unabhängig davon:
Wer Interesse an dem Projekt hat – ich sitze im Großraum Stuttgart (nördlich).
Ihr seid herzlich eingeladen, auf ein Bier oder einen Tee vorbeizukommen, Euch meinen Mini-Prototypen anzuschauen und mit mir über mögliche Umsetzungen, Verbesserungen oder auch meine Denkfehler zu diskutieren.
Ich freue mich über jeden, der Lust und Zeit hat, sich das live anzusehen.
Viele Grüße
Mücke
Attachments:
Last edit: 09 Mar 2026 16:11 by Muecke.
Please Log in or Create an account to join the conversation.
- sivaraj
- Offline
- Senior Member
-
Less
More
- Posts: 50
- Thank you received: 25
10 Mar 2026 12:30 #344088
by sivaraj
Replied by sivaraj on topic 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
Based on the manual (download.sew-eurodrive.com/download/pdf/29194652.pdf), your motor appears to be an 8-pole motor.
For an 8-pole motor to operate at 4500 RPM, it requires a frequency supply of approximately 300 Hz, which is supported by most modern drives.
Please note that the 400 V value refers to the inverter-rated voltage, not the motor's rated voltage. You can find additional details in the following document (see page 44):
download.sew-eurodrive.com/download/pdf/29133866.pdf
I found a similar motor with name plate details in this ebay listing:
www.ebay.de/itm/168190225800
This motor rated Power is 5.29 kW
Usys 400 V is the inverter-rated voltage
Motor rated voltage: 328 V
It is not strictly necessary for the drive’s current rating to match the motor’s maximum current, especially if you have a large gear ratio. In such cases, a lower power drive can be used. For example:
11 kW drive should work well . Estimate the torque required
Even a 7.5 kW drive may also be sufficient depending on the application
However, if you plan to use the motor at its maximum rating (48 A with 51 Nm at 4500 RPM), this would require approximately a 22 kW drive.
Another important consideration is the type of encoder installed on the motor. You may need to ensure the encoder is compatible with the selected drive, or possibly replace it to match the drive requirements.
I have seen CTB China drives were used by Linuxcnc user,You can check CTB universal drive with Ethercat interface
For an 8-pole motor to operate at 4500 RPM, it requires a frequency supply of approximately 300 Hz, which is supported by most modern drives.
Please note that the 400 V value refers to the inverter-rated voltage, not the motor's rated voltage. You can find additional details in the following document (see page 44):
download.sew-eurodrive.com/download/pdf/29133866.pdf
I found a similar motor with name plate details in this ebay listing:
www.ebay.de/itm/168190225800
This motor rated Power is 5.29 kW
Usys 400 V is the inverter-rated voltage
Motor rated voltage: 328 V
It is not strictly necessary for the drive’s current rating to match the motor’s maximum current, especially if you have a large gear ratio. In such cases, a lower power drive can be used. For example:
11 kW drive should work well . Estimate the torque required
Even a 7.5 kW drive may also be sufficient depending on the application
However, if you plan to use the motor at its maximum rating (48 A with 51 Nm at 4500 RPM), this would require approximately a 22 kW drive.
Another important consideration is the type of encoder installed on the motor. You may need to ensure the encoder is compatible with the selected drive, or possibly replace it to match the drive requirements.
I have seen CTB China drives were used by Linuxcnc user,You can check CTB universal drive with Ethercat interface
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
Moderators: Muecke
- International LinuxCNC Users
- Deutsch
- 400V Servo (51 Nm) mit EtherCAT / CiA402 in LinuxCNC – bezahlbarer Drive gesucht
Time to create page: 0.184 seconds