How start Config Yaskawa Servo
- aer73
- Offline
- Junior Member
-

Less
More
- Posts: 29
- Thank you received: 0
06 May 2015 02:13 #58415
by aer73
How start Config Yaskawa Servo was created by aer73
Hello to @ll.
I have 3 servopack Yaskawa SGDM-04ADA + SGMAH-04AAA21 servomotor.
Some body can tell me how to strat config it?
Stepconfig wizard or PnCConf Wizard , etc....
Many thanks in advance
Kindly regards.
I have 3 servopack Yaskawa SGDM-04ADA + SGMAH-04AAA21 servomotor.
Some body can tell me how to strat config it?
Stepconfig wizard or PnCConf Wizard , etc....
Many thanks in advance
Kindly regards.
Please Log in or Create an account to join the conversation.
- cmorley
- Away
- Moderator
-

Less
More
- Posts: 7958
- Thank you received: 2162
06 May 2015 10:39 #58422
by cmorley
Replied by cmorley on topic How start Config Yaskawa Servo
What hardware (mesa ? pico? parallel port? ) are you going to use to drive the servos?
how are they driven? step and direction or +-10 volt?
Chris M
how are they driven? step and direction or +-10 volt?
Chris M
Please Log in or Create an account to join the conversation.
- aer73
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 0
06 May 2015 11:12 - 06 May 2015 11:57 #58423
by aer73
Replied by aer73 on topic How start Config Yaskawa Servo
Hello.
Thanks for answer me.
I use parallel port for drive the servos and use step direction too.
Many thanks for help me.
Kindly regards
Thanks for answer me.
I use parallel port for drive the servos and use step direction too.
Many thanks for help me.
Kindly regards
Last edit: 06 May 2015 11:57 by aer73.
Please Log in or Create an account to join the conversation.
- cmorley
- Away
- Moderator
-
Less
More
- Posts: 7958
- Thank you received: 2162
06 May 2015 12:03 #58424
by cmorley
Replied by cmorley on topic How start Config Yaskawa Servo
if using the parallel port then I would use stepconf to build a config.
Chris M
Chris M
The following user(s) said Thank You: aer73
Please Log in or Create an account to join the conversation.
- aer73
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 0
06 May 2015 13:21 - 06 May 2015 13:27 #58425
by aer73
Replied by aer73 on topic How start Config Yaskawa Servo
Hi.
Many thanks for help me.")
I try that you say.
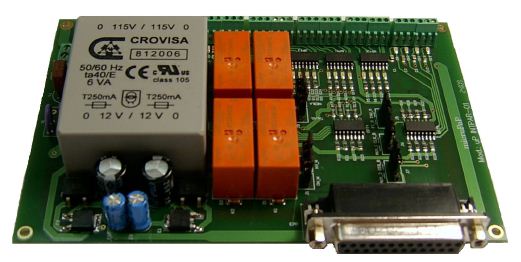
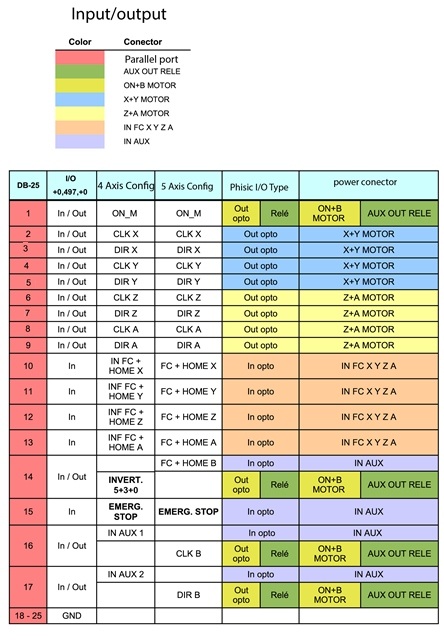
I put an image of the Card Specs.
Kindly regards
Many thanks for help me.
I try that you say.
I put an image of the Card Specs.
Kindly regards
Last edit: 06 May 2015 13:27 by aer73.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 23461
- Thank you received: 4992
06 May 2015 20:01 #58435
by andypugh
Replied by andypugh on topic How start Config Yaskawa Servo
The interface card uses clk/dir to mean the same think as the
Yaskawa drive manual
calls pulse.
The Yaskawa drives do _not_ use pulse/dir, they use either CW/CCW pulses or quadrature pulses. LinuxCNC supports these pulse types too . Step type 1 is CW/CCW and step type 2 is quadrature. You need to configure the Yaskawa drives to work in this mode.
It seems that Stepconf does not understand step types other than step/dir so the open-loop tests won't work. Once you have created a config with pins allocated to step/dir you will need to manually edit the HAL file to change the step type to 1 or 2 to make the drives function. (only one line to change)
The Yaskawa drives do _not_ use pulse/dir, they use either CW/CCW pulses or quadrature pulses. LinuxCNC supports these pulse types too . Step type 1 is CW/CCW and step type 2 is quadrature. You need to configure the Yaskawa drives to work in this mode.
It seems that Stepconf does not understand step types other than step/dir so the open-loop tests won't work. Once you have created a config with pins allocated to step/dir you will need to manually edit the HAL file to change the step type to 1 or 2 to make the drives function. (only one line to change)
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 5034
- Thank you received: 1467
06 May 2015 20:45 #58437
by Todd Zuercher
Sure they do step/dir, page 8-48 of the manual you referenced, says that it is the default setting for position control.
Replied by Todd Zuercher on topic How start Config Yaskawa Servo
The interface card uses clk/dir to mean the same think as the Yaskawa drive manual calls pulse.
The Yaskawa drives do _not_ use pulse/dir, they use either CW/CCW pulses or quadrature pulses. LinuxCNC supports these pulse types too .)
Sure they do step/dir, page 8-48 of the manual you referenced, says that it is the default setting for position control.
The following user(s) said Thank You: aer73
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 23461
- Thank you received: 4992
06 May 2015 21:10 #58439
by andypugh
So it does. I only got as far as the table on page 4.4. And I mis-read that.
I have to say that running expensive Servopacks open-loop from a parallel port seems an odd choice.
Replied by andypugh on topic How start Config Yaskawa Servo
Sure they do step/dir, page 8-48 of the manual you referenced, says that it is the default setting for position control.
So it does. I only got as far as the table on page 4.4. And I mis-read that.
I have to say that running expensive Servopacks open-loop from a parallel port seems an odd choice.
The following user(s) said Thank You: aer73
Please Log in or Create an account to join the conversation.
- aer73
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 0
06 May 2015 23:54 #58445
by aer73
Replied by aer73 on topic How start Config Yaskawa Servo
My servo model have Pulse/dir , Todd is right.
Here show you and screenshot of the diagram connections.
Many thanks to all.
Kindly regards.
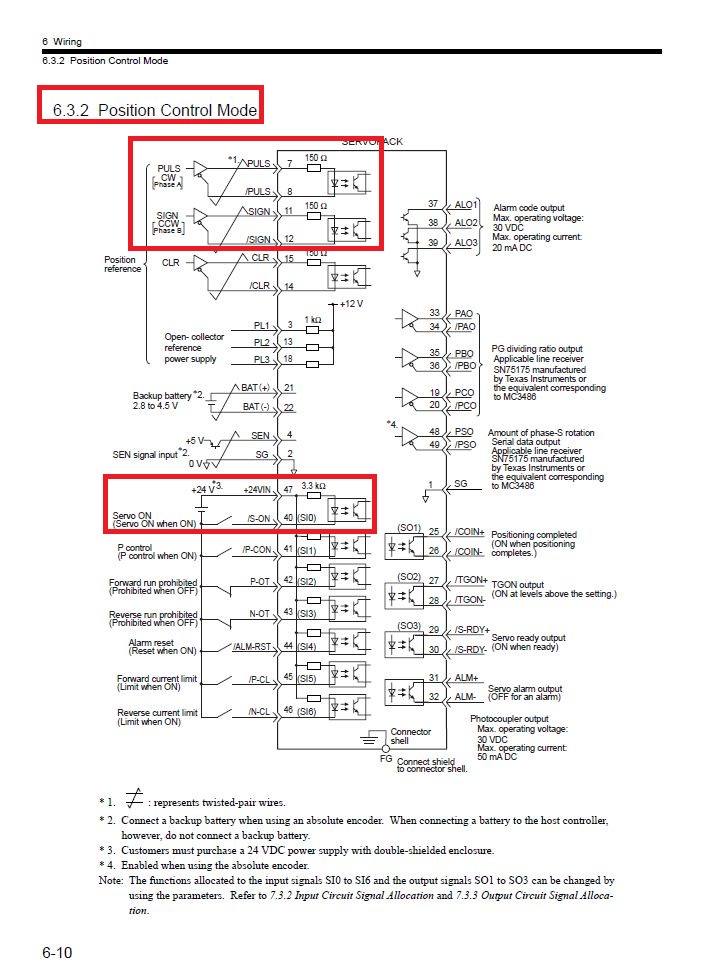
Here show you and screenshot of the diagram connections.
Many thanks to all.
Kindly regards.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 23461
- Thank you received: 4992
07 May 2015 00:07 #58446
by andypugh
Replied by andypugh on topic How start Config Yaskawa Servo
The drive appears to have opto-isolated inputs, do you know if your break-out board has opto-isolated outputs?
You might need to wire things in a slightly unexpected way.
You might need to wire things in a slightly unexpected way.
Please Log in or Create an account to join the conversation.
Time to create page: 0.199 seconds