Mesa 5i25 7i76 additional steps after fast movement.
- myankov
- Offline
- New Member
-

Less
More
- Posts: 7
- Thank you received: 0
09 Dec 2018 19:11 - 10 Dec 2018 07:14 #122110
by myankov
Mesa 5i25 7i76 additional steps after fast movement. was created by myankov
Hello
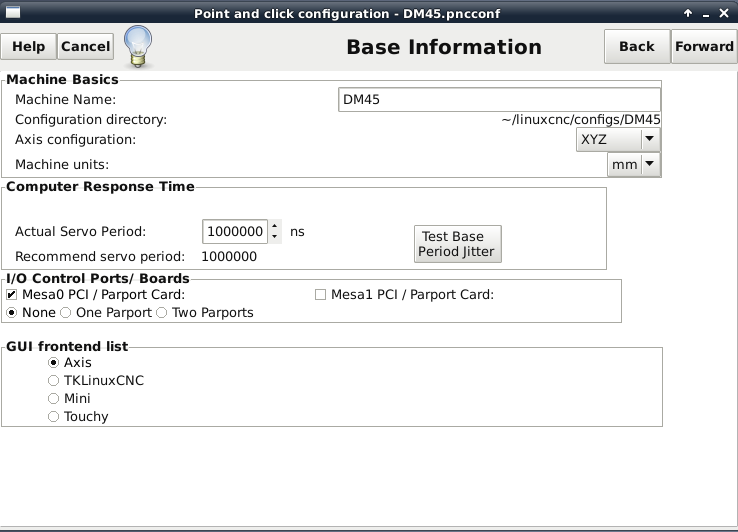
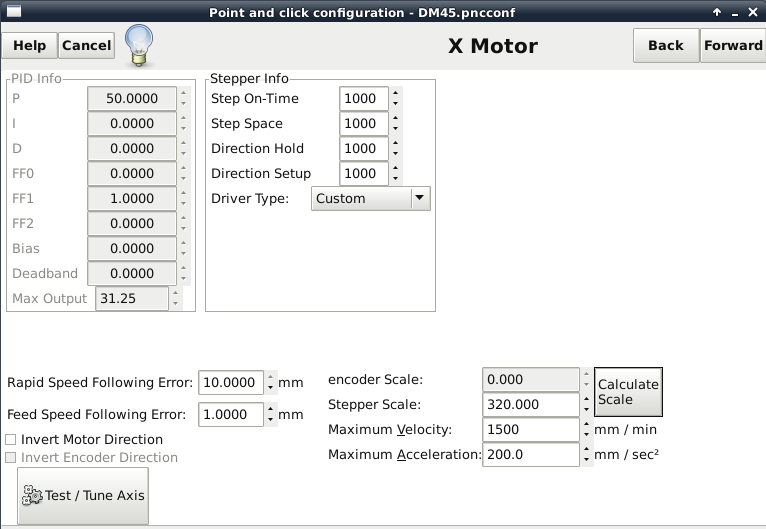
I am in initial stage of setting this Mesa combo. In PnCConf i set the speed to 1500 mm/m . But after i finish PnCConf and start axis max speed is 60 mm/m. I go in .ini and set the speed higher 1200 mm/m just to test.
Here is the bigger problem i have. After fast movement (max speed) i stop pressing the button, but the motor continues to make steps see video :
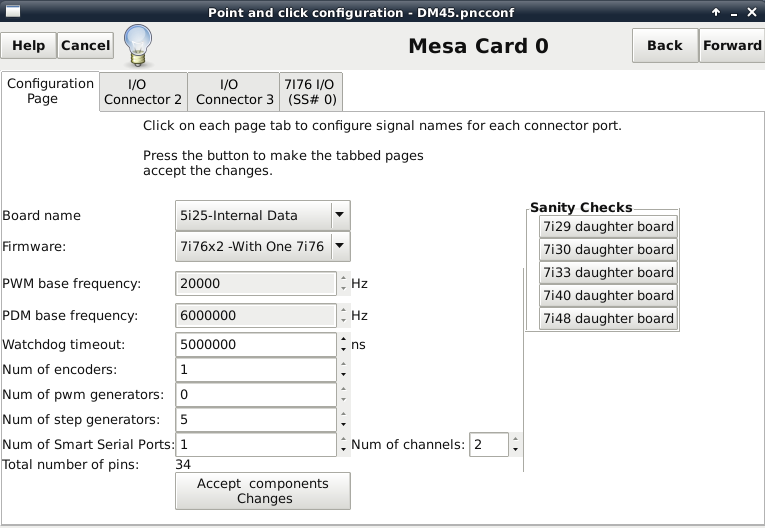
I use Hp pc with Intel processor.I have stooped everything in BIOS power management, virtualization ect. Both servo thread and base thread are between 20000 and 25000. Closed loop steppers with ma860h- 1600 micro steps.
Do i need faster PC or i am not making correct setting in PnCConf
I am in initial stage of setting this Mesa combo. In PnCConf i set the speed to 1500 mm/m . But after i finish PnCConf and start axis max speed is 60 mm/m. I go in .ini and set the speed higher 1200 mm/m just to test.
Here is the bigger problem i have. After fast movement (max speed) i stop pressing the button, but the motor continues to make steps see video :
I use Hp pc with Intel processor.I have stooped everything in BIOS power management, virtualization ect. Both servo thread and base thread are between 20000 and 25000. Closed loop steppers with ma860h- 1600 micro steps.
Do i need faster PC or i am not making correct setting in PnCConf
Last edit: 10 Dec 2018 07:14 by myankov.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17996
- Thank you received: 5282
10 Dec 2018 23:26 #122174
by PCW
Replied by PCW on topic Mesa 5i25 7i76 additional steps after fast movement.
In your HAL file, comment out all the
setp pid.N.maxerror .0005
statements
and all the
net N-vel-cmd => pid.N.command-deriv
statements
(where N is x,y,z)
setp pid.N.maxerror .0005
statements
and all the
net N-vel-cmd => pid.N.command-deriv
statements
(where N is x,y,z)
Please Log in or Create an account to join the conversation.
- myankov
- Offline
- New Member
-
Less
More
- Posts: 7
- Thank you received: 0
14 Dec 2018 13:05 #122414
by myankov
Replied by myankov on topic Mesa 5i25 7i76 additional steps after fast movement.
Ok this worked. Thank you .
But why i had to comment that ?
But why i had to comment that ?
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5282
14 Dec 2018 18:53 - 14 Dec 2018 19:52 #122422
by PCW
Replied by PCW on topic Mesa 5i25 7i76 additional steps after fast movement.
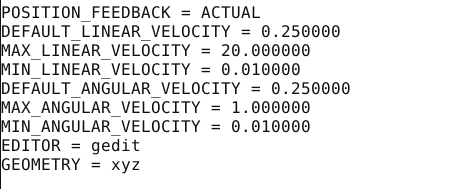
The maxerror = .0005 works for inches but is way too small for metric machines and does not allow the PID to correct for things like timebase differences between the host computer and the FPGA card. Because of this, its better to disable the PID correction bounding (maxerror defaults to 0 = no bounding) or to set it to say .01 on metric machines.
Also you should set P to 1000 at a 1 KHz servo thread
Also you should set P to 1000 at a 1 KHz servo thread
Last edit: 14 Dec 2018 19:52 by PCW. Reason: fix maxerror number
Please Log in or Create an account to join the conversation.
Time to create page: 0.149 seconds