MAX_ACCELERATION value?
- dm17ry
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 207
- Thank you received: 89
18 Mar 2019 14:22 #128900
by dm17ry
MAX_ACCELERATION value? was created by dm17ry
using current 2.8.
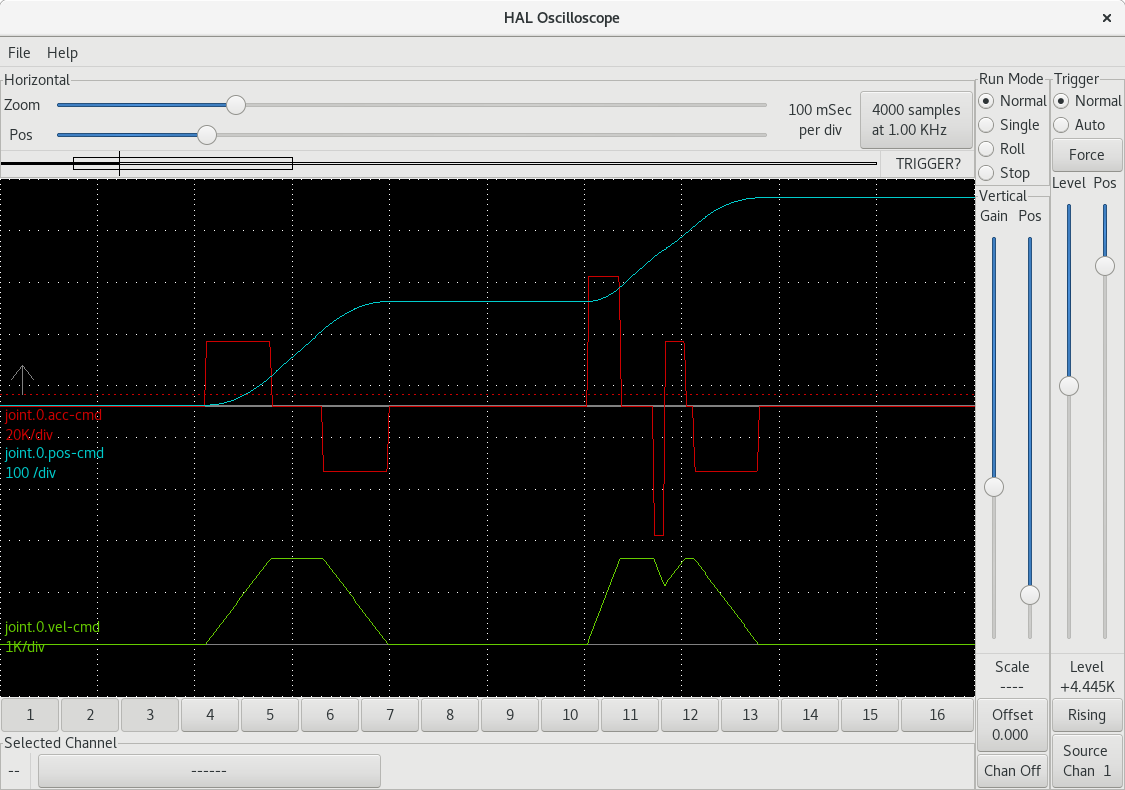
it looks to me that the actual axis acceleration is limited to exactly half of the value specified in [AXIS_X]MAX_ACCELERATION. attached is a picture with waveforms where [AXIS_X]MAX_ACCELERATION = 50000 (mm/s/s), which results in joint.0.acc-cmd swing between 25000 and -25000. is this intended behavior? not clear from the documentation...
also i noticed that corresponding [JOINT_0]MAX_VELOCITY and [JOINT_0]MAX_ACCELERATION have no effect, at least with trivkins.
it looks to me that the actual axis acceleration is limited to exactly half of the value specified in [AXIS_X]MAX_ACCELERATION. attached is a picture with waveforms where [AXIS_X]MAX_ACCELERATION = 50000 (mm/s/s), which results in joint.0.acc-cmd swing between 25000 and -25000. is this intended behavior? not clear from the documentation...
also i noticed that corresponding [JOINT_0]MAX_VELOCITY and [JOINT_0]MAX_ACCELERATION have no effect, at least with trivkins.
Please Log in or Create an account to join the conversation.
- dgarrett
- Offline
- Platinum Member
-

Less
More
- Posts: 492
- Thank you received: 297
18 Mar 2019 17:59 - 18 Mar 2019 20:01 #128913
by dgarrett
Replied by dgarrett on topic MAX_ACCELERATION value?
I could reproduce in a sim for some planned (gcode or mdi) moves.
For instance, a single g0 move with enough travel distance to reach
full speed shows this behavior.
I think it is built-in trajectory planning behavior for some moves as
set here:
github.com/LinuxCNC/linuxcnc/blob/master/src/emc/tp/tp.c#L328
For instance, a single g0 move with enough travel distance to reach
full speed shows this behavior.
I think it is built-in trajectory planning behavior for some moves as
set here:
github.com/LinuxCNC/linuxcnc/blob/master/src/emc/tp/tp.c#L328
Last edit: 18 Mar 2019 20:01 by dgarrett.
Please Log in or Create an account to join the conversation.
- dm17ry
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 207
- Thank you received: 89
19 Mar 2019 02:45 - 19 Mar 2019 03:35 #128957
by dm17ry
Replied by dm17ry on topic MAX_ACCELERATION value?
hm. it seems that it is not the full story... something pretty weird is happening on the last segment of the trajectory. code:
f100000
g0 x0
g1 x200 ; acc/dec get limited to 1/2 of max
g4 p0.2
g1 x300 ; max acc
g1 x400 ; max dec, then 1/2 acc (sic!) then 1/2 dec
Attachments:
Last edit: 19 Mar 2019 03:35 by dm17ry.
Please Log in or Create an account to join the conversation.
Time to create page: 0.179 seconds