Base Period Jitter Manual Changes (without StepConf)
- fernandosf
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

Less
More
- Posts: 69
- Thank you received: 17
20 Jul 2021 13:42 #215414
by fernandosf
Base Period Jitter Manual Changes (without StepConf) was created by fernandosf
Hey Guys,
I'm trying to understand how to setup Base Jitter manually on LinuxCNC files.
First thing done was to change a test config using StepConf and see the differences generated.
StepConf has a box called Base Period Max Jitter, it was the only config changed.
I got this:
So when Base Jitter is 10.000, StepConf changes dirhold and dirsetup to 30.000
Changing Base Jitter to 30.000, StepConf changes dirhold and dirsetup to 50.000
That's it? Or am I missing something?
I have DM556 Drivers and had found a minimum value of 10.000 and 5.000 for dirhold/dirsetup that worked.
But I had no idea that it was the only config related to Base Jitter and I am afraid I can face strange errors in the future.
Please, advise, thanks.
I'm trying to understand how to setup Base Jitter manually on LinuxCNC files.
First thing done was to change a test config using StepConf and see the differences generated.
StepConf has a box called Base Period Max Jitter, it was the only config changed.
I got this:
$ diff my-mill.stepconf my-mill2.stepconf
37c37
< <property name="latency" type="float" value="30000.0"/>
---
> <property name="latency" type="float" value="10000.0"/>
$ diff my-mill/my-mill.hal my-mill2/my-mill.hal
1c1
< # Generated by stepconf 1.1 at Tue Jul 20 09:27:06 2021
---
> # Generated by stepconf 1.1 at Tue Jul 20 09:26:14 2021
57,58c57,58
< setp stepgen.0.dirhold 50000
< setp stepgen.0.dirsetup 50000
---
> setp stepgen.0.dirhold 30000
> setp stepgen.0.dirsetup 30000
69,70c69,70
< setp stepgen.1.dirhold 50000
< setp stepgen.1.dirsetup 50000
---
> setp stepgen.1.dirhold 30000
> setp stepgen.1.dirsetup 30000
81,82c81,82
< setp stepgen.2.dirhold 50000
< setp stepgen.2.dirsetup 50000
---
> setp stepgen.2.dirhold 30000
> setp stepgen.2.dirsetup 30000
$ diff my-mill/my-mill.ini my-mill2/my-mill.ini
1c1
< # Generated by stepconf 1.1 at Tue Jul 20 09:27:06 2021
---
> # Generated by stepconf 1.1 at Tue Jul 20 09:26:14 2021So when Base Jitter is 10.000, StepConf changes dirhold and dirsetup to 30.000
Changing Base Jitter to 30.000, StepConf changes dirhold and dirsetup to 50.000
That's it? Or am I missing something?
I have DM556 Drivers and had found a minimum value of 10.000 and 5.000 for dirhold/dirsetup that worked.
But I had no idea that it was the only config related to Base Jitter and I am afraid I can face strange errors in the future.
Please, advise, thanks.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21757
- Thank you received: 7434
21 Jul 2021 09:00 #215466
by tommylight
Replied by tommylight on topic Base Period Jitter Manual Changes (without StepConf)
Stepconf is meant to make a usable config, and it does that perfectly.
For changing the timings and fine tuning, editing the .hal and .ini files in the config filder is the way to go.
In the ini file there will be
-base period - set this depending on the jitter value plus 50% to be on the safe side
-step time and step space- set this to 5000 and lower it gradually to where you are sure there are no missed steps from the drives, forget what drive manufacturers say about this
-dir setup and dir hold- set this to 20000, it does not matter much if you go lower or higher, but to low can cause very strange missed steps
For changing the timings and fine tuning, editing the .hal and .ini files in the config filder is the way to go.
In the ini file there will be
-base period - set this depending on the jitter value plus 50% to be on the safe side
-step time and step space- set this to 5000 and lower it gradually to where you are sure there are no missed steps from the drives, forget what drive manufacturers say about this
-dir setup and dir hold- set this to 20000, it does not matter much if you go lower or higher, but to low can cause very strange missed steps
The following user(s) said Thank You: DougM, fernandosf
Please Log in or Create an account to join the conversation.
- fernandosf
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 69
- Thank you received: 17
21 Jul 2021 17:45 #215509
by fernandosf
Replied by fernandosf on topic Base Period Jitter Manual Changes (without StepConf)
Thanks tommylight, looks like experienced advise.
It intrigues me why Stepconf did not changed anything else besides dirhold and dirstep.
But life goes on...
It intrigues me why Stepconf did not changed anything else besides dirhold and dirstep.
But life goes on...
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- BigJohnT
-

- Offline
- Administrator
-

Less
More
- Posts: 3990
- Thank you received: 994
22 Jul 2021 00:45 #215541
by BigJohnT
Replied by BigJohnT on topic Base Period Jitter Manual Changes (without StepConf)
Stepconf does have some limits and once you get a basic configuration editing the files is the way to go.
JT
JT
Please Log in or Create an account to join the conversation.
- fernandosf
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 69
- Thank you received: 17
08 Aug 2021 14:36 #217237
by fernandosf
Replied by fernandosf on topic Base Period Jitter Manual Changes (without StepConf)
Hey Guys,
I have searched DM-556 timings and read about DoubleStep (I'm using parport).
So I added a 10% margin and set INI and HAL accordingly.
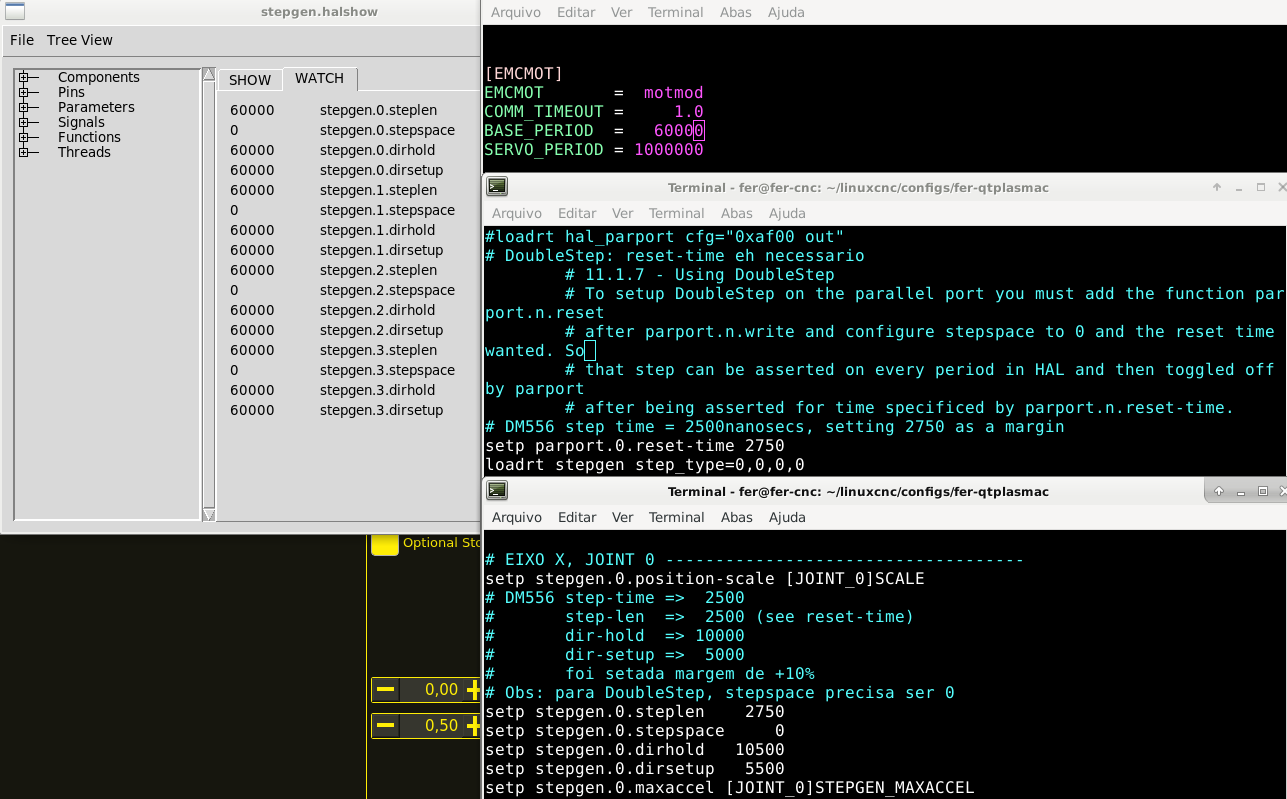
But, somehow, stepgen values are set to 60000 (which is the setting I've defined for BASE_PERIOD)
I was expecting dirsetup, dirhold and steplen to be the ones I defined.
Can someone explain why LinuxCNC is not following my settings?
I have searched DM-556 timings and read about DoubleStep (I'm using parport).
So I added a 10% margin and set INI and HAL accordingly.
But, somehow, stepgen values are set to 60000 (which is the setting I've defined for BASE_PERIOD)
I was expecting dirsetup, dirhold and steplen to be the ones I defined.
Can someone explain why LinuxCNC is not following my settings?
Attachments:
Please Log in or Create an account to join the conversation.
- fernandosf
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 69
- Thank you received: 17
08 Aug 2021 15:39 #217246
by fernandosf
Replied by fernandosf on topic Base Period Jitter Manual Changes (without StepConf)
Following TommyLight advice above, does not seem to get any better:
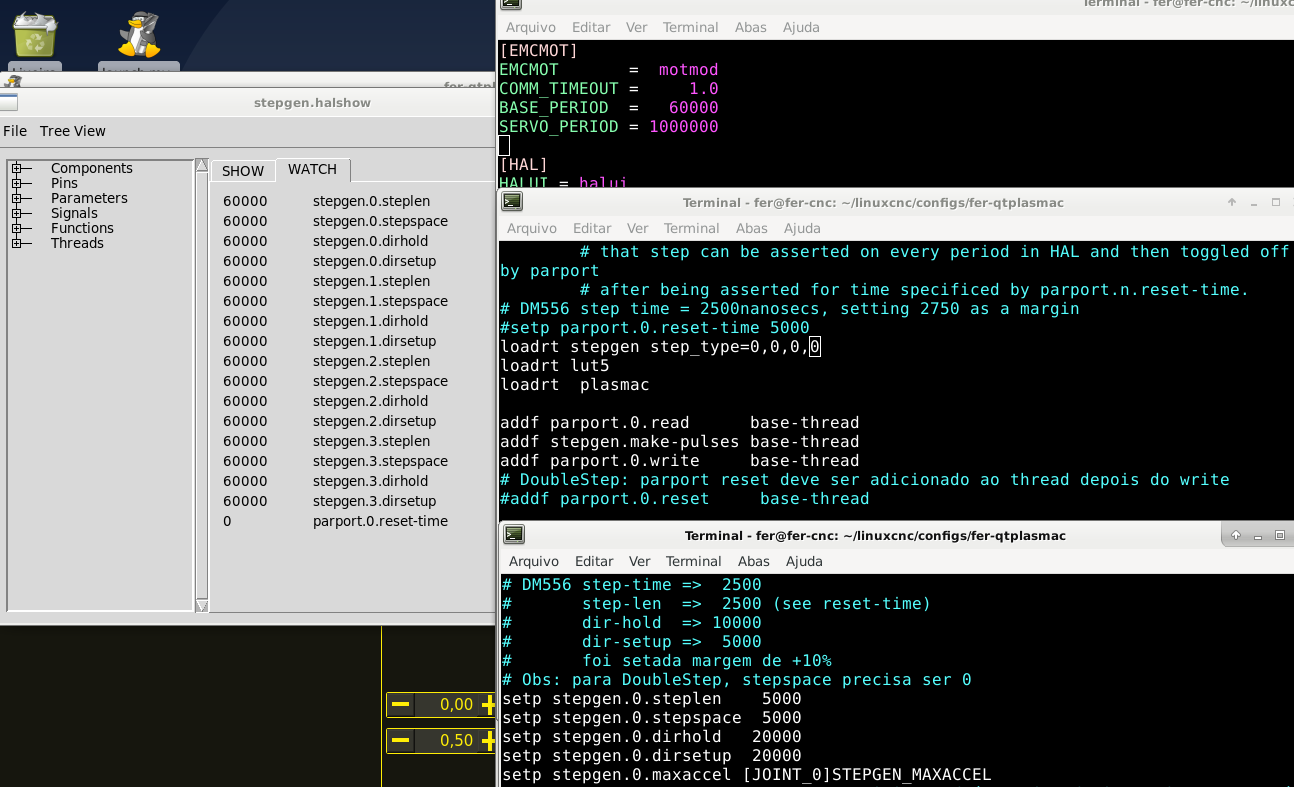
Attachments:
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4644
11 Aug 2021 00:17 - 11 Aug 2021 00:18 #217446
by andypugh
Replied by andypugh on topic Base Period Jitter Manual Changes (without StepConf)
There is no advantage in having dirhold and dirsetup short. The machine is by definition moving at zero speed at that point.
If you want shorter step lengths, then edit the INI file.
The chances are that the max speeds that you have configured mean that Stepconf sees no need to use a short step length, as the max required step rate can be achieved without.
If you want shorter step lengths, then edit the INI file.
The chances are that the max speeds that you have configured mean that Stepconf sees no need to use a short step length, as the max required step rate can be achieved without.
Last edit: 11 Aug 2021 00:18 by andypugh.
The following user(s) said Thank You: fernandosf
Please Log in or Create an account to join the conversation.
- fernandosf
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 69
- Thank you received: 17
13 Aug 2021 13:58 #217679
by fernandosf

Replied by fernandosf on topic Base Period Jitter Manual Changes (without StepConf)
Absolutely convinced LinuxCNC programmers are way more intelligent than meThe chances are that the max speeds that you have configured mean that Stepconf sees no need to use a short step length, as the max required step rate can be achieved without.
Please Log in or Create an account to join the conversation.
Time to create page: 0.159 seconds