Z axis plasma homing problems
- CarterKraft
- Offline
- Senior Member
-

- Posts: 47
- Thank you received: 7
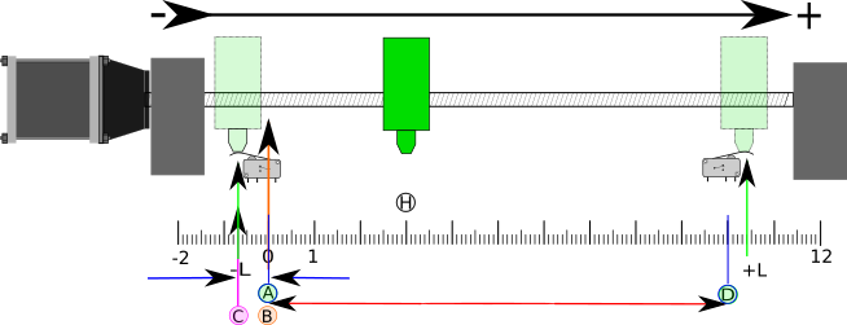
In an effort to teach a man to fish could I ask one of you to just give me the outline of what I should be using to determine the correct parameters. I was trying to use the below diagram to come up with the recipe but I am outsmarting myself I think...
The switch does work and and I can get some function so the TB3 setup is correct I think. The limits/homing is killing me.
My Z has a 3" travel with a combined proximity limit/home switch at the top Z+ and float switch on the torch holder.
I am thinking the ideal was Z max height at 3" bu maybe that was not correct, should home be 0 and the slats be -3"?
I got it working with home at 2.75" but for some reason I decided that was not correct and I tried to change something (can't even remember what now) and I broke it.
There is not much point posting my HAL or INI because I have changed so much but I suppose I will put the INI in here anyway, just be aware the current config is miles from where I started.
[AXIS_Z]
# MAX_VEL & MAX_ACC need to be twice the corresponding joint value
MAX_VELOCITY = 4.0
MAX_ACCELERATION = 100.0
OFFSET_AV_RATIO = 0.5
MIN_LIMIT = 0
MAX_LIMIT = 3.25
[JOINT_3]
TYPE = LINEAR
HOME = .0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 2.0
MAX_ACCELERATION = 50.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 2.50
STEPGEN_MAXACCEL = 62.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 5000
DIRHOLD = 8000
STEPLEN = 2500
STEPSPACE = 2500
STEP_SCALE = 2000.0
MIN_LIMIT = 0.0
MAX_LIMIT = 3.25
HOME_OFFSET = -.25
HOME_SEARCH_VEL = 0.16667
HOME_LATCH_VEL = 0.16667
HOME_FINAL_VEL = 0.16667
HOME_USE_INDEX = YES
HOME_IGNORE_LIMITS = YES
HOME_SEQUENCE = 0
#******************************************
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

- Posts: 21658
- Thank you received: 7399
-
If you want to try fixing this, first make sure the direction of motion is correct, minus goes down, plus goes up, and change the limit values, max should be 0 or something just above it while min should be negative for almost any machine, then
omit the offset or set it to 0
set the home_velocities to very low so you can actually follow what is going on while homing.
HOME_OFFSET = -.25
HOME_SEARCH_VEL = 0.16667
HOME_LATCH_VEL = 0.16667
HOME_FINAL_VEL = 0.16667
If when pressing home:
machine moves away from home switch = add - in front of search_velocity value
if after hitting switch first time continues past switch = add - to latch velocity
if it moves past switch after backing off and hitting switch second time =add - to final velocity
Please Log in or Create an account to join the conversation.
- CarterKraft
- Offline
- Senior Member
-
- Posts: 47
- Thank you received: 7
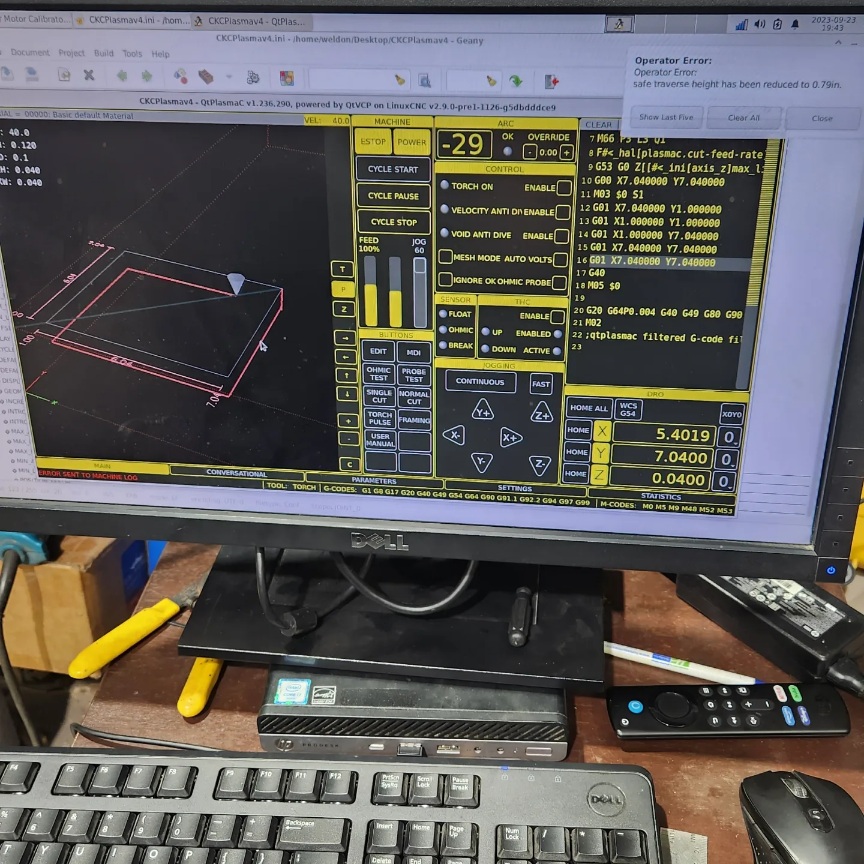
After MUCH MORE trial and error before seeing your reply I got it to "work".
I found many problems with my limit/homing but I also found I had the velocities set waay to high causing lost steps which exacerbated the limit/homing problems.
I noticed a "buzz" or "beep" sound that was actually the motor stalling instead of positioning.
Here is the INI from the current working config, before comparing to your suggestion.
[AXIS_Z]
# MAX_VEL & MAX_ACC need to be twice the corresponding joint value
MAX_VELOCITY = .5
MAX_ACCELERATION = 12.5
OFFSET_AV_RATIO = 0.5
MIN_LIMIT = 0.0
MAX_LIMIT = 3.5
[JOINT_3]
TYPE = LINEAR
HOME = 3.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = .25
MAX_ACCELERATION = 6
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = .32
STEPGEN_MAXACCEL = 8
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 5000
DIRHOLD = 8000
STEPLEN = 2500
STEPSPACE = 2500
STEP_SCALE = 4000.0
MIN_LIMIT = 0.0
MAX_LIMIT = 3.5
HOME_OFFSET = 3.2
HOME_SEARCH_VEL = 0.15
HOME_LATCH_VEL = 0.008
HOME_FINAL_VEL = -0.008
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_SEQUENCE = 0
#******************************************
Please Log in or Create an account to join the conversation.
- CarterKraft
- Offline
- Senior Member
-
- Posts: 47
- Thank you received: 7
even air cut a 6"x6" square.
Attachments:
Please Log in or Create an account to join the conversation.